Clear Sky Science · ru
Калориметрический дифференциальный датчик давления с высокой чувствительностью для гидродинамического восприятия
Почему подводным роботам нужна более тонкая «осязательная» способность
По мере того как люди исследуют всё более глубокие и тёмные участки океана, подводные роботы становятся нашими глазами и руками в местах, куда нам сложно добраться. Но в мутной воде, где камеры и гидролокаторы работают хуже, этим машинам нужен другой способ «ощущать» окружение. В этой статье представлен новый тип датчика давления, который даёт подводным роботам рыбообразное восприятие потока воды, помогая им точно маневрировать, оценивать собственное движение и даже обнаруживать скрытые препятствия по крошечным рябям в воде.

Учимся у того, как рыбы чувствуют воду
Рыбы ориентируются в мутных реках и глубоких морях благодаря особому органу — боковой линии, ряду крошечных сенсоров вдоль тела, которые улавливают небольшие изменения давления и потока воды. Вдохновлённые этой природной системой, исследователи долгие годы создавали искусственные «боковые линии» для роботов. Многие существующие устройства измеряют абсолютное давление воды вокруг корпуса, но такие показания легко «перекрываются» большим изменением давления от самой глубины. Другие регистрируют лишь быстрые переменные сигналы и пропускают медленные, тонкие подсказки. Новая работа решает эти ограничения с помощью датчика, ориентированного на разность давления между двумя близкими точками, что позволяет игнорировать общий уровень глубины и выделять слабые сигнатуры потоков и препятствий поблизости.
Как новый датчик превращает давление в тепловые сигналы
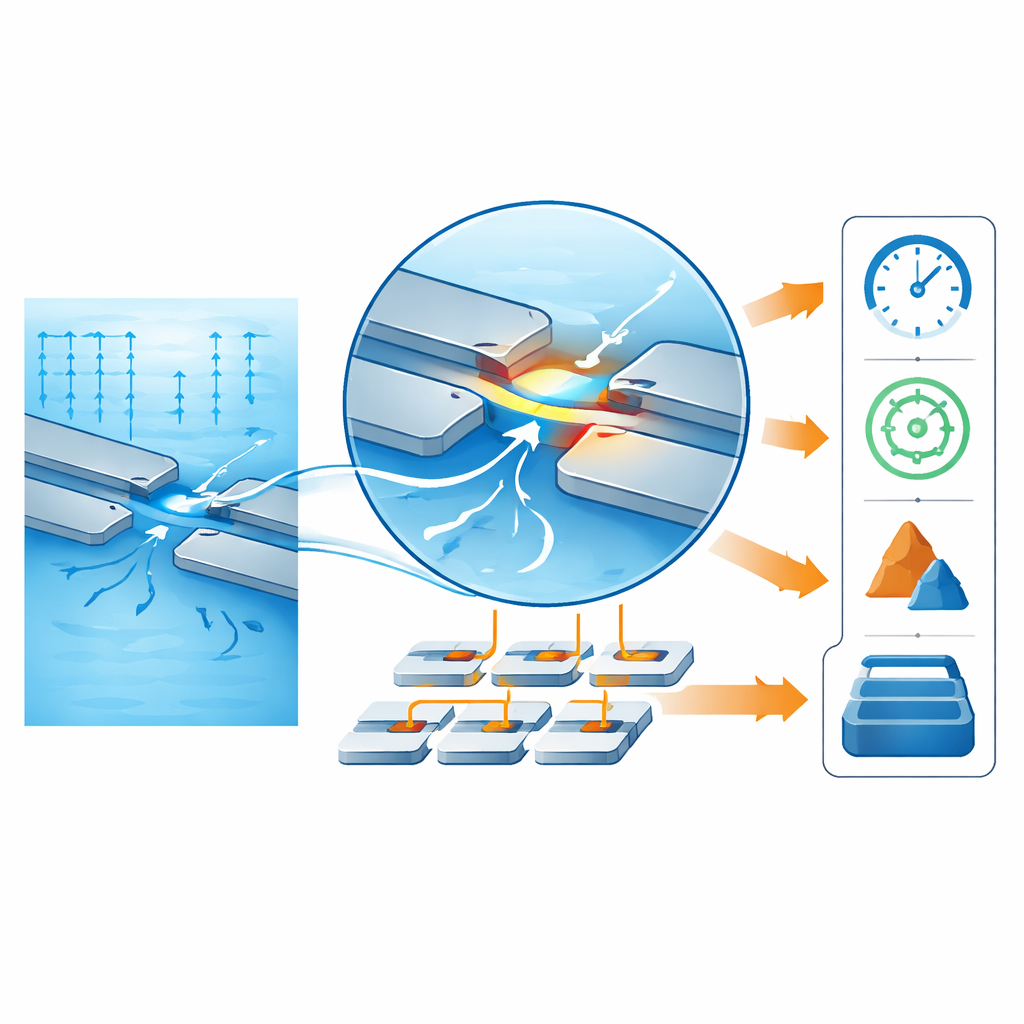
В основе устройства лежит крошечный чип с двумя тонкими балками, обращёнными друг к другу и разделёнными узким зазором. Вода может проникать через этот зазор с одной стороны чипа на другую. Когда давление с одной стороны немного выше, чем с другой, вода проталкивается через зазор и ускоряется, проходя между балками. Микроскопический нагреватель и температурочувствительные металлические полоски размещены прямо на конце одной из балок. В спокойной воде нагреватель равномерно прогревает окружение. Когда вода врывается через зазор, она сильнее уносит тепло с одной стороны, изменяя температурный профиль. Сравнивая датчик рядом с нагревателем и вспомогательный датчик чуть дальше, система может фиксировать эти крошечные эффекты охлаждения, одновременно компенсируя медленные изменения температуры окружающей среды или воды.
Создание миниатюрного, но прочного прибора измерения
Исследователи использовали стандартные методы микропроцессорного производства, чтобы вырезать балки и зазор из кремния и покрыть их тонким защитным слоем. Тщательно контролируемое химическое травление освободило балки, позволяя им образовать узкий канал потока без трещин. Затем сенсорный чип был герметично установлен в небольшую камеру давления с каналами, соединяющимися с окружающей водой. Испытания в заполненной водой установке показали, что выходной сигнал датчика плавно растёт с увеличением перепада давления, с особенно сильным откликом при очень низких давлениях. Он способен обнаруживать разности порядка примерно 0,019 паскаля — значительно слабее типичных фоновых вариаций — и воспроизводит измерения надежно, показывая лишь незначительный дрейф в течение недели работы.
Даря роботу гидродинамическое «шестое чувство»
Чтобы продемонстрировать полезность этой чувствительности, команда установила три таких датчика в носовой части обтекаемой модели подводного робота. При протекании воды в испытательном туннеле каждый датчик измерял разность давления между двумя близлежащими точками на обшивке. По этим показаниям простая нейронная сеть научилась оценивать как скорость движения робота, так и его угол относительно потока. В многочисленных испытаниях система могла оценивать скорость с точностью до нескольких миллиметров в секунду и направление с погрешностью примерно в один градус, даже на низких скоростях, где сигналы самые слабые. В другом наборе экспериментов тот же массив сенсоров «слушал» вихревые структуры, называемые улицами Кármана, которые образуют разные объекты, размещённые по течению. Обучив модель машинного обучения на этих «гидрофлюидных отпечатках», робот смог различать 20 разных форм и размеров препятствий с точностью около 97,5%.
Что это значит для будущих океанских машин
Проще говоря, исследователи дали подводным роботам гораздо более острое «чувство воды», похожее на то, как рыбы ощущают течения и объекты поблизости. Их калориметрический дифференциальный датчик давления преобразует крошечные перепады давления в легко считываемые температурные изменения, оставаясь точным в полезном диапазоне и не путая сигналы из‑за общей глубины. Объединённые в массивы и интерпретируемые с помощью программного обеспечения, эти сенсоры позволяют роботам отслеживать собственное движение и распознавать препятствия исключительно по потоку воды вокруг них. С дальнейшей доработкой и интеграцией в компактную электронику эта технология может помочь будущим океанским роботам безопаснее ориентироваться, работать в более тёмных и загруженных условиях и лучше участвовать в исследовании самых скрытых уголков Земли.
Цитирование: Cao, Y., Ma, Z., Kang, H. et al. Calorimetric differential pressure sensor with high sensitivity for hydrodynamic perception. Microsyst Nanoeng 12, 146 (2026). https://doi.org/10.1038/s41378-026-01270-9
Ключевые слова: подводные роботы, датчики давления, биовдохновлённое восприятие, обнаружение потока, гидродинамическое восприятие