Clear Sky Science · en
Calorimetric differential pressure sensor with high sensitivity for hydrodynamic perception
Why Underwater Robots Need a Better Sense of Touch
As humans explore deeper and darker parts of the ocean, underwater robots are becoming our eyes and hands in places we can’t easily go. But in murky water where cameras and sonar struggle, these machines need another way to “feel” their surroundings. This paper introduces a new type of pressure sensor that gives underwater robots a fish-like sense of water flow, helping them steer accurately, estimate their own motion, and even detect hidden obstacles just from tiny ripples in the water.

Learning from How Fish Feel the Water
Fish navigate cloudy rivers and deep seas using a special organ called the lateral line, a line of tiny sensors along their bodies that detect slight changes in water pressure and flow. Inspired by this natural system, researchers have spent years building artificial “lateral lines” for robots. Many existing devices measure the absolute pressure of the water around them, but these readings are easily swamped by the huge change in pressure that comes simply from being deeper underwater. Others sense only fast, changing signals and miss slower, subtle cues. The new work tackles these limits with a sensor that focuses on pressure differences between two nearby points, allowing it to ignore the overall depth and instead pick out the faint signatures of nearby flows and obstacles.
How the New Sensor Turns Pressure into Heat Signals
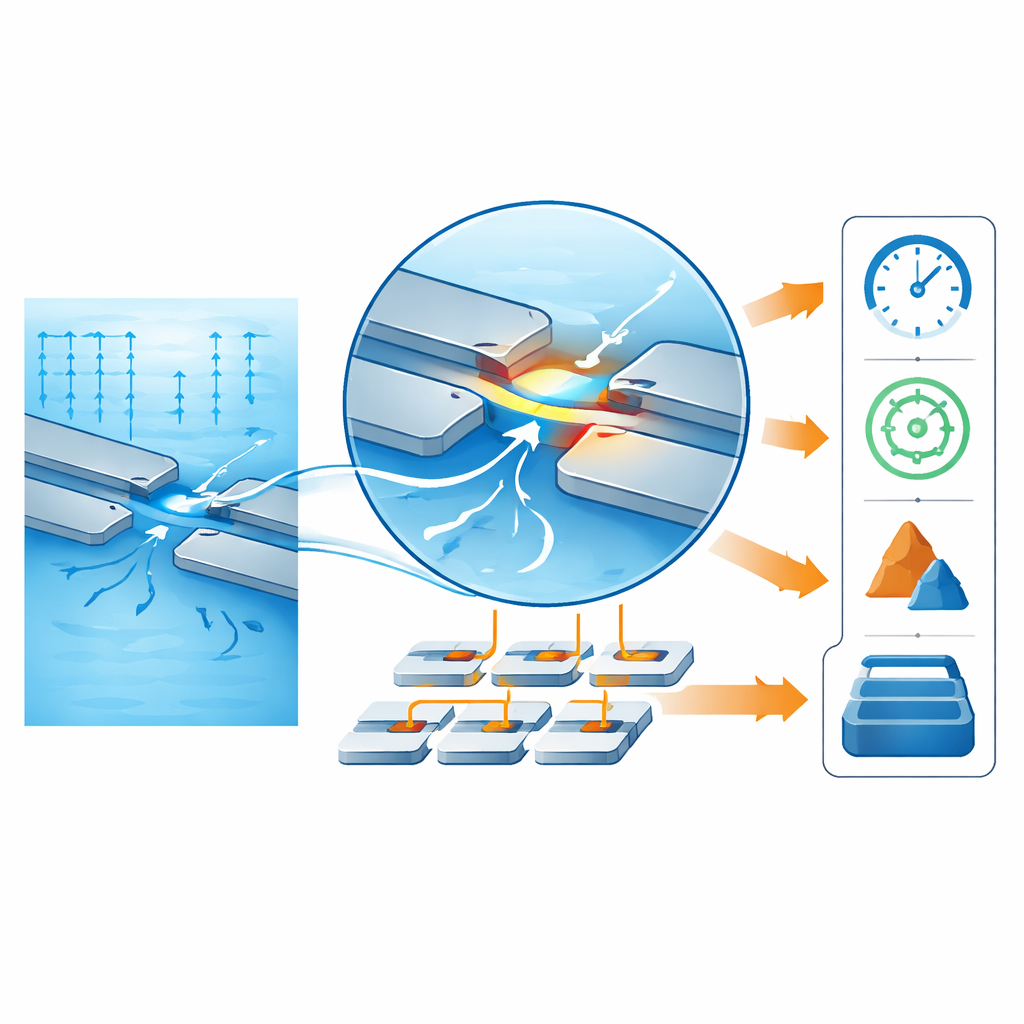
At the heart of the device is a tiny chip with two slender beams facing each other and separated by a narrow gap. Water can slip through this gap from one side of the chip to the other. When the pressure on one side is slightly higher than on the other, water is driven through the gap, speeding up as it squeezes between the beams. A microscopic heater and temperature-sensitive metal strips are built right at the tip of one beam. In still water, the heater warms its surroundings evenly. When water rushes through the gap, it carries heat away more strongly on one side, changing the temperature pattern. By comparing a sensor close to the heater with a companion sensor farther away, the system can detect these tiny cooling effects while canceling out slow changes in room or water temperature.
Building a Tiny but Tough Measuring Device
The researchers used standard microchip manufacturing techniques to carve the beams and gap out of silicon and coat them with a thin, protective layer. Carefully controlled chemical etching was used to free the beams so they could form the narrow flow channel without cracking. The sensing chip was then sealed into a small pressure chamber with ports that connect to the outside water. Tests in a water-filled setup showed that the sensor’s output rises smoothly as the pressure difference increases, with especially strong response at very low pressures. It can detect differences as small as about 19 thousandths of a pascal—far weaker than typical background variations—and it repeats its measurements reliably with only tiny drift over a week of operation.
Giving a Robot a Hydrodynamic Sixth Sense
To show how useful this sensitivity can be, the team mounted three of the sensors in the nose of a streamlined underwater robot model. As water flowed past in a test tunnel, each sensor measured the pressure difference between two nearby points on the hull. From these readings, a simple neural network learned to infer both how fast the robot was moving and how much it was turned relative to the flow. Across many tests, the system could estimate speed to within a few millimeters per second and heading to within about one degree, even at low speeds where signals are weakest. In a second set of experiments, the same sensor array listened to the swirling patterns, called Kármán vortex streets, shed by different objects placed upstream. By training a machine-learning model on these flow fingerprints, the robot was able to distinguish 20 different obstacle shapes and sizes with an accuracy of about 97.5%.
What This Means for Future Ocean Machines
In simple terms, the researchers have given underwater robots a much sharper “water sense,” similar to how fish feel currents and nearby bodies. Their calorimetric differential pressure sensor converts minuscule pressure differences into easy-to-read temperature changes, remaining accurate over a useful range without being confused by overall depth. Combined into arrays and interpreted by software, these sensors allow robots to track their own motion and recognize obstacles using only the flow of water around them. With further development and integration into compact electronics, this technology could help future ocean-going robots navigate more safely, operate in darker and more cluttered waters, and better share the job of exploring Earth’s most hidden environments.
Citation: Cao, Y., Ma, Z., Kang, H. et al. Calorimetric differential pressure sensor with high sensitivity for hydrodynamic perception. Microsyst Nanoeng 12, 146 (2026). https://doi.org/10.1038/s41378-026-01270-9
Keywords: underwater robots, pressure sensors, bioinspired sensing, flow detection, hydrodynamic perception