Clear Sky Science · pt
Sensor de pressão diferencial calorimétrico com alta sensibilidade para percepção hidrodinâmica
Por que robôs subaquáticos precisam de um sentido de toque melhor
À medida que os humanos exploram partes mais profundas e escuras do oceano, robôs subaquáticos tornam-se nossos olhos e mãos em lugares onde não conseguimos ir com facilidade. Mas em águas turvas, onde câmeras e sonar têm desempenho limitado, essas máquinas precisam de outra forma de “sentir” o ambiente. Este artigo apresenta um novo tipo de sensor de pressão que oferece aos robôs subaquáticos uma percepção do fluxo de água semelhante à dos peixes, ajudando-os a se orientar com precisão, estimar seu próprio movimento e até detectar obstáculos ocultos a partir de pequenas ondulações na água.

Aprendendo com a maneira como os peixes sentem a água
Peixes navegam por rios turvos e mares profundos usando um órgão especial chamado linha lateral, uma fileira de sensores minúsculos ao longo do corpo que detectam pequenas variações de pressão e fluxo da água. Inspirados nesse sistema natural, pesquisadores passaram anos construindo “linhas laterais” artificiais para robôs. Muitos dispositivos existentes medem a pressão absoluta da água ao redor, mas essas leituras são facilmente apagadas pela grande variação de pressão causada simplesmente pela profundidade. Outros captam apenas sinais rápidos e variáveis, perdendo pistas lentas e sutis. O novo trabalho supera essas limitações com um sensor que se concentra na diferença de pressão entre dois pontos próximos, permitindo que ignore a profundidade geral e destaque as fracas assinaturas de fluxos e obstáculos próximos.
Como o novo sensor transforma pressão em sinais térmicos
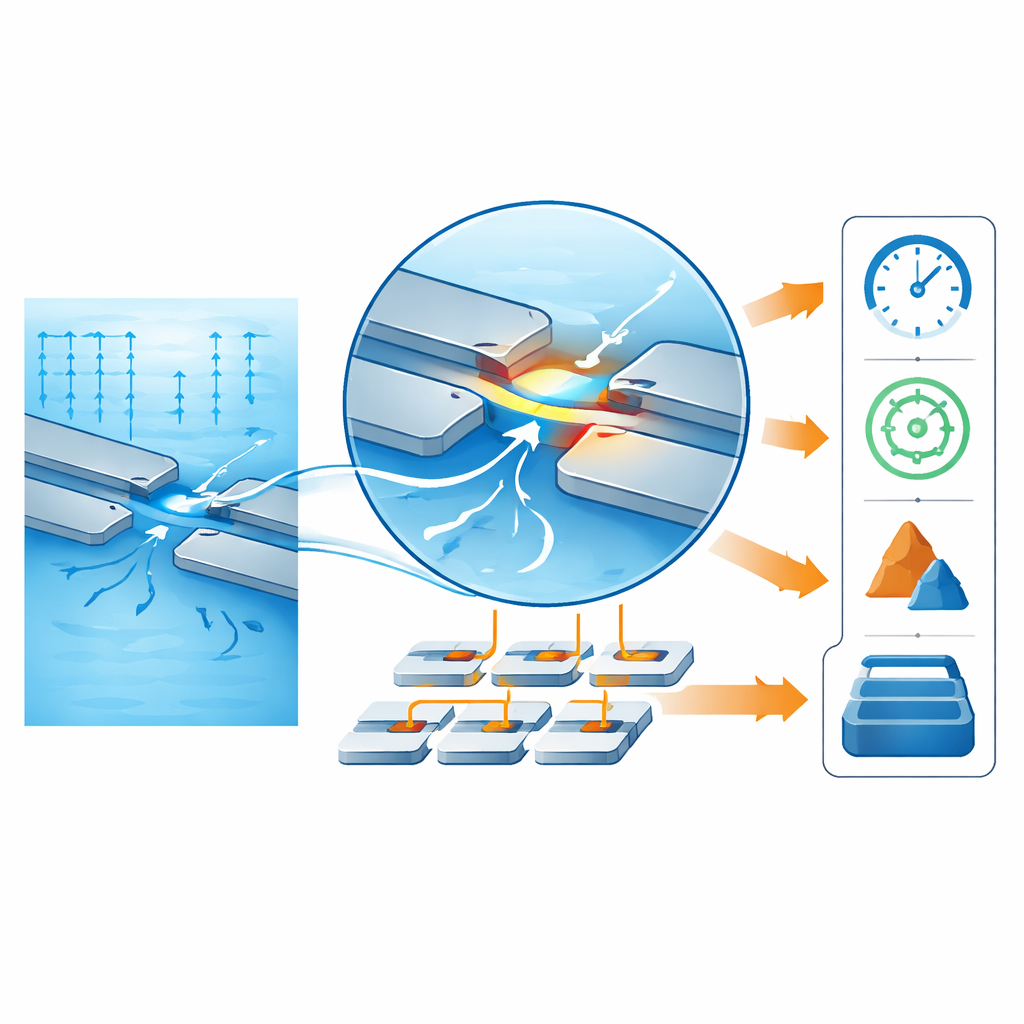
No cerne do dispositivo está um chip minúsculo com duas vigas finas voltadas uma para a outra e separadas por uma fenda estreita. A água pode escorregar por essa fenda de um lado do chip para o outro. Quando a pressão de um lado é ligeiramente maior que a do outro, a água é forçada através da fenda, acelerando ao se comprimir entre as vigas. Um aquecedor microscópico e tiras metálicas sensíveis à temperatura são integrados bem na ponta de uma das vigas. Em água parada, o aquecedor aquece o entorno de maneira uniforme. Quando a água corre pela fenda, ela remove calor com mais intensidade de um lado, alterando o padrão de temperatura. Ao comparar um sensor próximo ao aquecedor com um sensor acompanhante mais distante, o sistema consegue detectar esses pequenos efeitos de resfriamento enquanto cancela variações lentas na temperatura ambiente ou da água.
Construindo um dispositivo de medição pequeno, porém robusto
Os pesquisadores usaram técnicas padrão de fabricação de microchips para esculpir as vigas e a fenda no silício e revesti-las com uma camada protetora fina. Ataques químicos controlados foram usados para liberar as vigas, permitindo que formassem o canal de fluxo estreito sem trincar. O chip sensor foi então selado em uma pequena câmara de pressão com portas que se conectam à água externa. Testes em um sistema preenchido com água mostraram que a saída do sensor aumenta suavemente conforme a diferença de pressão cresce, com resposta especialmente forte em pressões muito baixas. Ele pode detectar diferenças tão pequenas quanto cerca de 0,019 pascal — muito menores que as variações de fundo típicas — e repete suas medições de forma confiável, com deriva mínima ao longo de uma semana de operação.
Dando a um robô um sexto sentido hidrodinâmico
Para demonstrar a utilidade dessa sensibilidade, a equipe montou três desses sensores no nariz de um modelo de robô subaquático aerodinâmico. À medida que a água fluía em um túnel de teste, cada sensor mediu a diferença de pressão entre dois pontos próximos da carcaça. A partir dessas medições, uma rede neural simples aprendeu a inferir tanto a velocidade do robô quanto seu ângulo em relação ao fluxo. Em muitos testes, o sistema pôde estimar a velocidade com precisão de poucos milímetros por segundo e o rumo com cerca de um grau, mesmo em baixas velocidades onde os sinais são mais fracos. Em um segundo conjunto de experimentos, a mesma matriz de sensores “ouviu” os padrões de vórtices, chamados de ruas de von Kármán, gerados por diferentes objetos colocados a montante. Treinando um modelo de aprendizado de máquina com essas impressões digitais de fluxo, o robô conseguiu distinguir 20 formas e tamanhos diferentes de obstáculos com uma precisão de cerca de 97,5%.
O que isso significa para as máquinas oceânicas do futuro
Em termos simples, os pesquisadores deram aos robôs subaquáticos um “sentido da água” muito mais apurado, semelhante à maneira como peixes percebem correntes e objetos próximos. Seu sensor calorimétrico de pressão diferencial converte diferenças de pressão minúsculas em mudanças de temperatura fáceis de ler, mantendo a precisão em uma faixa útil sem se confundir com a profundidade geral. Combinados em matrizes e interpretados por software, esses sensores permitem que robôs acompanhem seu próprio movimento e reconheçam obstáculos usando apenas o fluxo de água ao redor. Com desenvolvimento adicional e integração em eletrônica compacta, essa tecnologia pode ajudar robôs oceânicos futuros a navegar com mais segurança, operar em águas mais escuras e com mais entulho, e colaborar melhor na exploração dos ambientes mais escondidos da Terra.
Citação: Cao, Y., Ma, Z., Kang, H. et al. Calorimetric differential pressure sensor with high sensitivity for hydrodynamic perception. Microsyst Nanoeng 12, 146 (2026). https://doi.org/10.1038/s41378-026-01270-9
Palavras-chave: robôs subaquáticos, sensores de pressão, sensoriamento bioinspirado, detecção de fluxo, percepção hidrodinâmica