Clear Sky Science · nl
Calorimetrische differentiële druksensor met hoge gevoeligheid voor hydrodynamische waarneming
Waarom onderwaterrobots een beter tastgevoel nodig hebben
Terwijl mensen dieper en donkerder delen van de oceaan verkennen, worden onderwaterrobots onze ogen en handen op plekken waar wij moeilijk kunnen komen. Maar in troebel water, waar camera’s en sonar beperkt zijn, hebben deze machines een andere manier nodig om hun omgeving te „voelen”. Dit artikel introduceert een nieuw type druksensor dat onderwaterrobots een visachtig vermogen geeft om waterstromen waar te nemen, zodat ze nauwkeurig kunnen sturen, hun eigen beweging kunnen inschatten en zelfs verborgen obstakels kunnen detecteren aan de hand van kleine rimpels in het water.

Leren van hoe vissen het water voelen
Vissen navigeren in troebele rivieren en diepe zeeën met behulp van een speciaal orgaan, de laterale lijn: een rij kleine sensoren langs hun lichaam die kleine veranderingen in druk en stroming detecteren. Geïnspireerd door dit natuurlijke systeem hebben onderzoekers jaren gewerkt aan kunstmatige „laterale lijnen” voor robots. Veel bestaande apparaten meten de absolute druk van het omringende water, maar die metingen worden gemakkelijk overschaduwd door de enorme drukverandering die simpelweg met diepte gepaard gaat. Andere sensoren vangen alleen snelle, veranderende signalen en missen langzamere, subtiele aanwijzingen. Het nieuwe werk pakt deze beperkingen aan met een sensor die zich richt op drukverschillen tussen twee nabijgelegen punten, waardoor de algemene diepte wordt genegeerd en in plaats daarvan de zwakke signaturen van nabije stromingen en obstakels worden uitgelicht.
Hoe de nieuwe sensor druk omzet in warmtesignalen
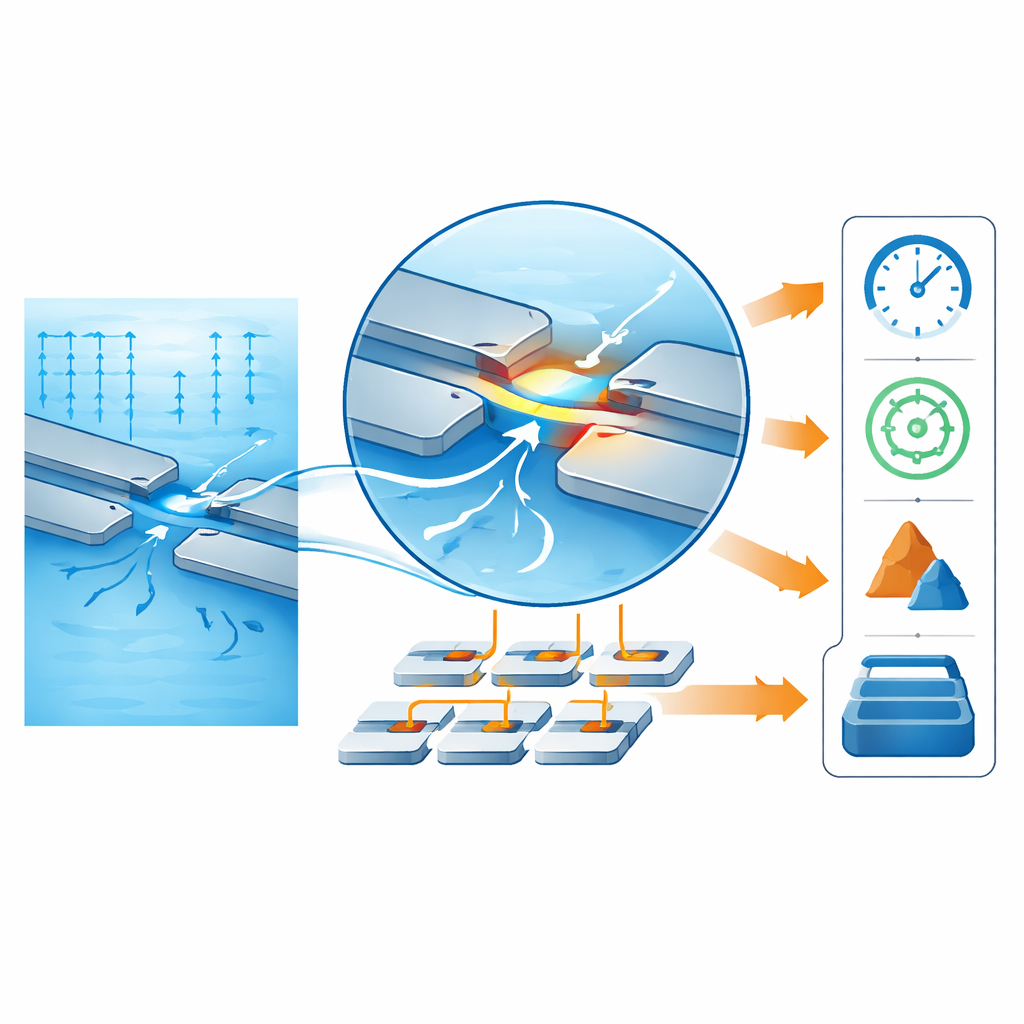
In het hart van het apparaat zit een kleine chip met twee slanke balkjes die elkaar tegenoverstaan en gescheiden zijn door een smalle opening. Water kan door deze opening van de ene naar de andere kant van de chip stromen. Wanneer de druk aan de ene kant iets hoger is dan aan de andere kant, wordt water door de opening gedreven en versnelt het terwijl het tussen de balkjes wordt geperst. Een microscopische verwarmer en temperatuurgevoelige metalen strookjes zijn ingebouwd aan het uiteinde van één balkje. In stilstaand water verwarmt de verwarmer de omgeving gelijkmatig. Wanneer water door de opening stroomt, voert het aan één kant meer warmte af, wat het temperatuurpatroon verandert. Door een sensor dicht bij de verwarmer te vergelijken met een metgezel die verder weg zit, kan het systeem deze kleine afkoeleffecten detecteren terwijl langzame veranderingen in omgevingstemperatuur of watertemperatuur worden weggefilterd.
Een klein maar robuust meetsysteem bouwen
De onderzoekers gebruikten standaard microchipproductietechnieken om de balkjes en de opening uit silicium te frezen en ze met een dunne beschermlaag te bedekken. Nauwkeurig gecontroleerd chemisch etsen werd gebruikt om de balkjes vrij te maken zodat ze het smalle stromingskanaal konden vormen zonder te barsten. De sensorchip werd vervolgens in een kleine drukkamer verzegeld met openingen die met het buitenwater verbinden. Tests in een met water gevulde opstelling toonden aan dat het uitgangssignaal van de sensor soepel toeneemt naarmate het drukverschil groter wordt, met een bijzonder sterke respons bij zeer lage drukken. Hij kan verschillen detecteren van ongeveer 0,019 pascal — veel zwakker dan typische achtergrondvariaties — en herhaalt zijn metingen betrouwbaar met slechts minimale drift over een week bedrijfstijd.
De robot een hydrodynamische zesde zintuig geven
Om te laten zien hoe nuttig deze gevoeligheid kan zijn, monteerde het team drie van de sensoren in de neus van een gestroomlijnd onderwaterrobotmodel. Terwijl water in een testtunnel langsstroomde, mat iedere sensor het drukverschil tussen twee nabijgelegen punten op de romp. Vanuit deze metingen leerde een eenvoudige neurale netwerk zowel de snelheid van de robot als de hoek ten opzichte van de stroming af te leiden. In veel tests kon het systeem de snelheid schatten binnen een paar millimeter per seconde en de koers binnen ongeveer één graad, zelfs bij lage snelheden waar de signalen het zwakst zijn. In een tweede reeks experimenten luisterde hetzelfde sensorarrangement naar de wervelpatronen, Kármán-wervelstraten genoemd, die door verschillende objecten stroomopwaarts werden gegenereerd. Door een machine-learningmodel te trainen op deze stromingsvingerafdrukken kon de robot 20 verschillende obstakelvormen en -groottes onderscheiden met een nauwkeurigheid van ongeveer 97,5%.
Wat dit betekent voor toekomstige oceaanmachines
In eenvoudige bewoordingen hebben de onderzoekers onderwaterrobots een veel scherper „watergevoel” gegeven, vergelijkbaar met hoe vissen stromingen en nabije objecten aanvoelen. Hun calorimetrische differentiële druksensor zet minuscule drukverschillen om in gemakkelijk uitleesbare temperatuurveranderingen, blijft nauwkeurig over een bruikbare reeks en raakt niet in de war door de algemene diepte. Gecombineerd in arrays en geïnterpreteerd door software, stellen deze sensoren robots in staat hun eigen beweging te volgen en obstakels te herkennen met alleen de waterstroming om hen heen. Met verdere ontwikkeling en integratie in compacte elektronica kan deze technologie toekomstige oceaanrobots helpen veiliger te navigeren, te opereren in donkerdere en drukkere wateren en beter bij te dragen aan het verkennen van de meest verborgen omgevingen op aarde.
Bronvermelding: Cao, Y., Ma, Z., Kang, H. et al. Calorimetric differential pressure sensor with high sensitivity for hydrodynamic perception. Microsyst Nanoeng 12, 146 (2026). https://doi.org/10.1038/s41378-026-01270-9
Trefwoorden: onderwaterrobots, druksensoren, bio-geïnspireerde sensoren, stroomdetectie, hydrodynamische waarneming