Clear Sky Science · es
Sensores de presión diferencial calorimétricos de alta sensibilidad para la percepción hidrodinámica
Por qué los robots submarinos necesitan un mejor sentido del tacto
A medida que los humanos exploran partes más profundas y oscuras del océano, los robots submarinos se convierten en nuestros ojos y manos en lugares a los que no podemos llegar con facilidad. Pero en aguas turbias, donde las cámaras y el sonar tienen dificultades, estas máquinas necesitan otra forma de “sentir” su entorno. Este artículo presenta un nuevo tipo de sensor de presión que ofrece a los robots submarinos una sensación del flujo del agua similar a la de los peces, ayudándoles a maniobrar con precisión, estimar su propio movimiento e incluso detectar obstáculos ocultos solo a partir de pequeñas ondulaciones en el agua.

Aprendiendo de cómo los peces sienten el agua
Los peces navegan por ríos turbios y mares profundos usando un órgano especial llamado línea lateral, una hilera de diminutos sensores a lo largo de sus cuerpos que detectan ligeros cambios en la presión y el flujo del agua. Inspirados en este sistema natural, los investigadores llevan años construyendo “líneas laterales” artificiales para robots. Muchos dispositivos existentes miden la presión absoluta del agua a su alrededor, pero esas lecturas se ven fácilmente enmascaradas por el gran cambio de presión que supone simplemente estar a mayor profundidad. Otros perciben solo señales rápidas y cambiantes y pasan por alto indicios más lentos y sutiles. El nuevo trabajo afronta estas limitaciones con un sensor que se centra en las diferencias de presión entre dos puntos próximos, lo que le permite ignorar la profundidad general y, en su lugar, detectar las firmas débiles de flujos y obstáculos cercanos.
Cómo el nuevo sensor convierte la presión en señales térmicas
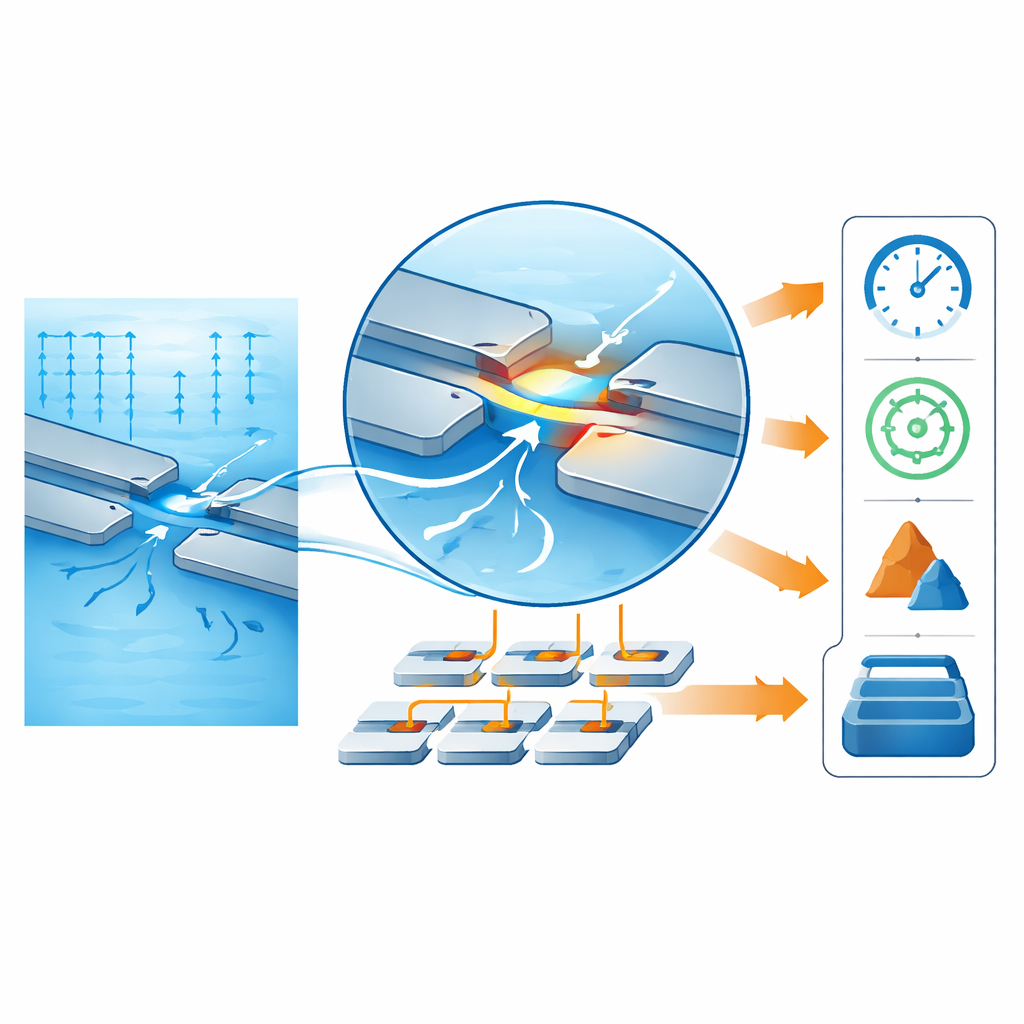
En el núcleo del dispositivo hay un chip diminuto con dos vigas delgadas enfrentadas y separadas por una ranura estrecha. El agua puede deslizarse a través de esa ranura desde un lado del chip hacia el otro. Cuando la presión en un lado es ligeramente mayor que en el otro, el agua se impulsa a través de la ranura, acelerando al comprimirse entre las vigas. Un microcalentador y tiras metálicas sensibles a la temperatura están integrados justo en la punta de una de las vigas. En agua en reposo, el calentador calienta su entorno de forma homogénea. Cuando el agua atraviesa la ranura, arrastra el calor con más fuerza en un lado, cambiando el patrón de temperatura. Al comparar un sensor cercano al calentador con un sensor compañero más alejado, el sistema puede detectar estos diminutos efectos de enfriamiento mientras cancela cambios lentos en la temperatura ambiente o del agua.
Construir un dispositivo de medición pequeño pero resistente
Los investigadores usaron técnicas estándar de fabricación de microchips para tallar las vigas y la ranura en silicio y recubrirlas con una capa protectora delgada. Se empleó un grabado químico controlado con precisión para liberar las vigas de modo que pudieran formar el estrecho canal de flujo sin agrietarse. El chip sensor se selló entonces en una pequeña cámara de presión con puertos conectados al agua exterior. Pruebas en un montaje lleno de agua mostraron que la salida del sensor aumenta de forma continua conforme crece la diferencia de presión, con una respuesta especialmente intensa a presiones muy bajas. Puede detectar diferencias tan pequeñas como unos 0,019 pascales—mucho más débiles que las variaciones de fondo típicas—y repite sus mediciones de manera fiable con una deriva mínima durante una semana de funcionamiento.
Dar al robot un sexto sentido hidrodinámico
Para demostrar la utilidad de esta sensibilidad, el equipo montó tres de los sensores en la punta de un modelo de robot submarino aerodinámico. Mientras el agua fluía en un túnel de pruebas, cada sensor midió la diferencia de presión entre dos puntos próximos en el casco. A partir de estas lecturas, una red neuronal simple aprendió a inferir tanto la velocidad a la que se movía el robot como su orientación con respecto al flujo. En numerosas pruebas, el sistema pudo estimar la velocidad con una precisión de unos pocos milímetros por segundo y la dirección con una precisión de aproximadamente un grado, incluso a bajas velocidades donde las señales son más débiles. En un segundo conjunto de experimentos, la misma matriz de sensores registró los patrones de remolinos, llamados calles de vórtices de Kármán, desprendidos por distintos objetos colocados aguas arriba. Entrenando un modelo de aprendizaje automático con estas huellas de flujo, el robot pudo distinguir 20 formas y tamaños de obstáculos diferentes con una precisión de alrededor del 97,5 %.
Qué significa esto para las máquinas oceánicas del futuro
En términos sencillos, los investigadores han dado a los robots submarinos un “sentido del agua” mucho más agudo, similar a cómo los peces perciben corrientes y cuerpos cercanos. Su sensor calorimétrico de presión diferencial convierte diferencias minúsculas de presión en cambios de temperatura fáciles de leer, manteniéndose preciso en un rango útil sin confundirse por la profundidad general. Combinados en arreglos e interpretados por software, estos sensores permiten a los robots seguir su propio movimiento y reconocer obstáculos usando únicamente el flujo de agua que los rodea. Con un mayor desarrollo e integración en electrónica compacta, esta tecnología podría ayudar a que los futuros robots oceánicos naveguen con mayor seguridad, operen en aguas más oscuras y congestionadas y contribuyan mejor a la exploración de los entornos más ocultos de la Tierra.
Cita: Cao, Y., Ma, Z., Kang, H. et al. Calorimetric differential pressure sensor with high sensitivity for hydrodynamic perception. Microsyst Nanoeng 12, 146 (2026). https://doi.org/10.1038/s41378-026-01270-9
Palabras clave: robots submarinos, sensores de presión, detección bioinspirada, detección de flujo, percepción hidrodinámica