Clear Sky Science · it
Sensore di pressione differenziale calorimetrico ad alta sensibilità per la percezione idrodinamica
Perché i robot subacquei hanno bisogno di un senso del tatto migliore
Man mano che l’uomo esplora parti più profonde e oscure dell’oceano, i robot subacquei diventano i nostri occhi e le nostre mani in luoghi dove non possiamo arrivare facilmente. Ma in acque torbide, dove telecamere e sonar incontrano difficoltà, queste macchine hanno bisogno di un altro modo per “sentire” l’ambiente. Questo articolo presenta un nuovo tipo di sensore di pressione che conferisce ai robot subacquei una sensibilità al flusso simile a quella dei pesci, aiutandoli a orientarsi con precisione, stimare il proprio movimento e persino rilevare ostacoli nascosti semplicemente dalle lievi increspature nell’acqua.

Imparare da come i pesci percepiscono l’acqua
I pesci navigano in fiumi torbidi e mari profondi usando un organo speciale chiamato linea laterale, una fila di sensori minuscoli lungo il corpo che rilevano piccole variazioni di pressione e di flusso dell’acqua. Ispirandosi a questo sistema naturale, i ricercatori hanno passato anni a costruire “linee laterali” artificiali per i robot. Molti dispositivi esistenti misurano la pressione assoluta dell’acqua intorno a loro, ma queste letture vengono facilmente sovrastate dal grande cambiamento di pressione dovuto semplicemente alla profondità. Altri sensori captano solo segnali rapidi e variabili, perdendo indizi più lenti e sottili. Il nuovo lavoro affronta questi limiti con un sensore che si concentra sulla differenza di pressione tra due punti vicini, consentendo di ignorare la profondità complessiva e invece cogliere le deboli firme di flussi e ostacoli nelle vicinanze.
Come il nuovo sensore trasforma la pressione in segnali termici
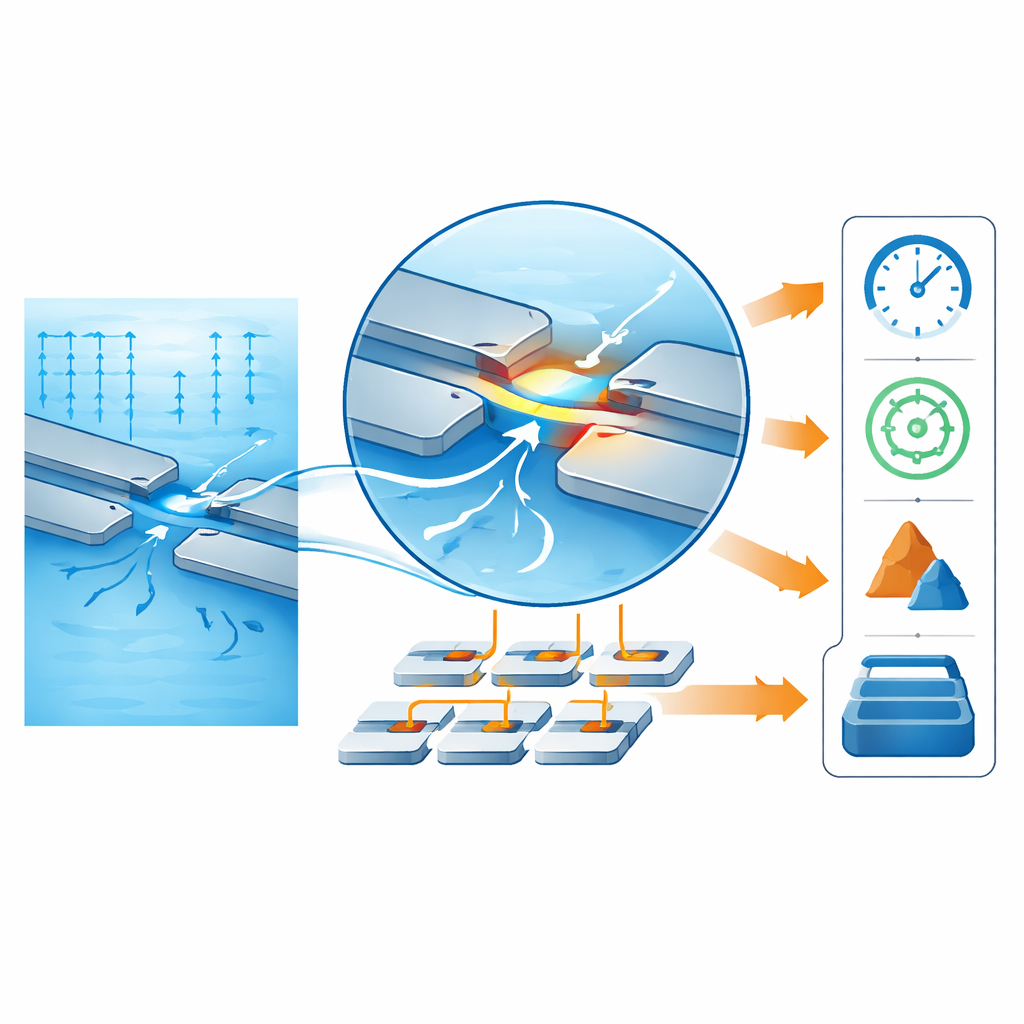
Al centro del dispositivo c’è un minuscolo chip con due sottili travi una di fronte all’altra separate da una fessura stretta. L’acqua può scorrere attraverso questa fessura da un lato del chip all’altro. Quando la pressione su un lato è leggermente più alta che sull’altro, l’acqua viene spinta attraverso la fessura, accelerando mentre si stringe tra le travi. Un micro-riscaldatore e sottili strisce metalliche sensibili alla temperatura sono integrati proprio sulla punta di una trave. In acqua ferma, il riscaldatore riscalda l’intorno in modo uniforme. Quando l’acqua scorre attraverso la fessura, asporta calore in modo più marcato da un lato, modificando il profilo termico. Confrontando un sensore vicino al riscaldatore con un sensore compagno più distante, il sistema può rilevare questi minuscoli effetti di raffreddamento annullando al contempo i cambiamenti lenti della temperatura ambiente o dell’acqua.
Costruire un dispositivo di misura piccolo ma robusto
I ricercatori hanno utilizzato tecniche standard di fabbricazione di microchip per ricavare le travi e la fessura dal silicio e ricoprirle con uno strato protettivo sottile. L’incisione chimica controllata è stata usata con cura per liberare le travi in modo che potessero formare il canale di flusso stretto senza rompersi. Il chip sensore è poi stato sigillato in una piccola camera di pressione con prese che si collegano all’acqua esterna. Test in un apparato riempito d’acqua hanno mostrato che l’uscita del sensore aumenta in modo regolare all’aumentare della differenza di pressione, con una risposta particolarmente forte a pressioni molto basse. Può rilevare differenze dell’ordine di circa 19 millesimi di pascal — molto più deboli delle tipiche variazioni di fondo — e ripete le misurazioni in modo affidabile con solo una minima deriva nell’arco di una settimana di funzionamento.
Dotare un robot di un sesto senso idrodinamico
Per dimostrare l’utilità di questa sensibilità, il team ha montato tre sensori nel muso di un modello di robot subacqueo dal profilo idrodinamico. Mentre l’acqua fluiva in un tunnel di prova, ciascun sensore misurava la differenza di pressione tra due punti vicini sulla carena. Da queste letture, una semplice rete neurale ha imparato a inferire sia la velocità del robot sia l’angolo rispetto al flusso. In molti test, il sistema è stato in grado di stimare la velocità con un errore di pochi millimetri al secondo e la direzione con circa un grado di precisione, anche a basse velocità dove i segnali sono più deboli. In un secondo set di esperimenti, lo stesso array di sensori ha ascoltato i moti vorticosi, detti strade vorticali di Kármán, generati da diversi oggetti posti a monte. Addestrando un modello di machine learning su queste impronte di flusso, il robot è stato in grado di distinguere 20 forme e dimensioni di ostacoli con un’accuratezza di circa il 97,5%.
Cosa significa questo per le macchine oceaniche del futuro
In termini semplici, i ricercatori hanno dato ai robot subacquei un “senso dell’acqua” molto più acuto, simile a come i pesci percepiscono le correnti e gli oggetti vicini. Il loro sensore di pressione differenziale calorimetrico converte minuscole differenze di pressione in variazioni di temperatura facilmente leggibili, rimanendo accurato su un intervallo utile senza essere confuso dalla profondità complessiva. Combinati in array e interpretati via software, questi sensori permettono ai robot di tracciare il proprio movimento e riconoscere ostacoli usando solo il flusso d’acqua che li circonda. Con ulteriori sviluppi e integrazione in elettronica compatta, questa tecnologia potrebbe aiutare i robot oceanici futuri a navigare in modo più sicuro, operare in acque più buie e ingombre e contribuire meglio all’esplorazione degli ambienti più nascosti della Terra.
Citazione: Cao, Y., Ma, Z., Kang, H. et al. Calorimetric differential pressure sensor with high sensitivity for hydrodynamic perception. Microsyst Nanoeng 12, 146 (2026). https://doi.org/10.1038/s41378-026-01270-9
Parole chiave: robot subacquei, sensori di pressione, sensori bioispirati, rilevamento del flusso, percezione idrodinamica