Clear Sky Science · ar
مستشعر فرق الضغط الحراري بحساسية عالية للإدراك الهيدروديناميكي
لماذا تحتاج الروبوتات تحت الماء لحاسة لمسية أفضل
مع استكشاف البشر لأجزاء أعمق وأكثر ظلمة من المحيط، أصبحت الروبوتات تحت الماء أعيننا وأيدينا في أماكن لا يسهل علينا الوصول إليها. لكن في المياه العكرة حيث تتعثر الكاميرات والسونار، تحتاج هذه الآلات إلى وسيلة أخرى «لتحس» محيطها. تُقدّم هذه الورقة نوعًا جديدًا من مستشعرات الضغط يمنح الروبوتات تحت الماء حسًّا للتدفق يشبه حس الأسماك للمياه، مما يساعدها على التحكم بدقة، وتقدير حركتها، وحتى اكتشاف العقبات المخفية من خلال تموّجات دقيقة في الماء.

التعلّم من الطريقة التي تشعر بها الأسماك بالمياه
تتنقل الأسماك في الأنهار الموحلة والبحار العميقة مستخدمة عضوًا خاصًا يُسمى الخط الجانبي، وهو صف من مجسات صغيرة على طول أجسامها تكشف التغيرات الطفيفة في ضغط وتدفق الماء. مستلهمين من هذا النظام الطبيعي، أمضى الباحثون سنوات في بناء «خطوط جانبية» اصطناعية للروبوتات. تقيس العديد من الأجهزة الحالية الضغط المطلق للماء حولها، لكن هذه القراءات تُطغى بسهولة بالتغير الكبير في الضغط الناتج ببساطة عن الغوص إلى أعماق أكبر. وأخرى تلتقط فقط الإشارات السريعة المتغيرة وتفوت المؤشرات البطيئة والدقيقة. يتعامل العمل الجديد مع هذه القيود عبر مستشعر يركّز على فروق الضغط بين نقطتين متقابلتين قريبتي المسافة، مما يسمح له بتجاهل عمق الماء العام والتركيز على بصمات التدفق والعقبات القريبة الضعيفة.
كيف يحوّل المستشعر الجديد الضغط إلى إشارات حرارية
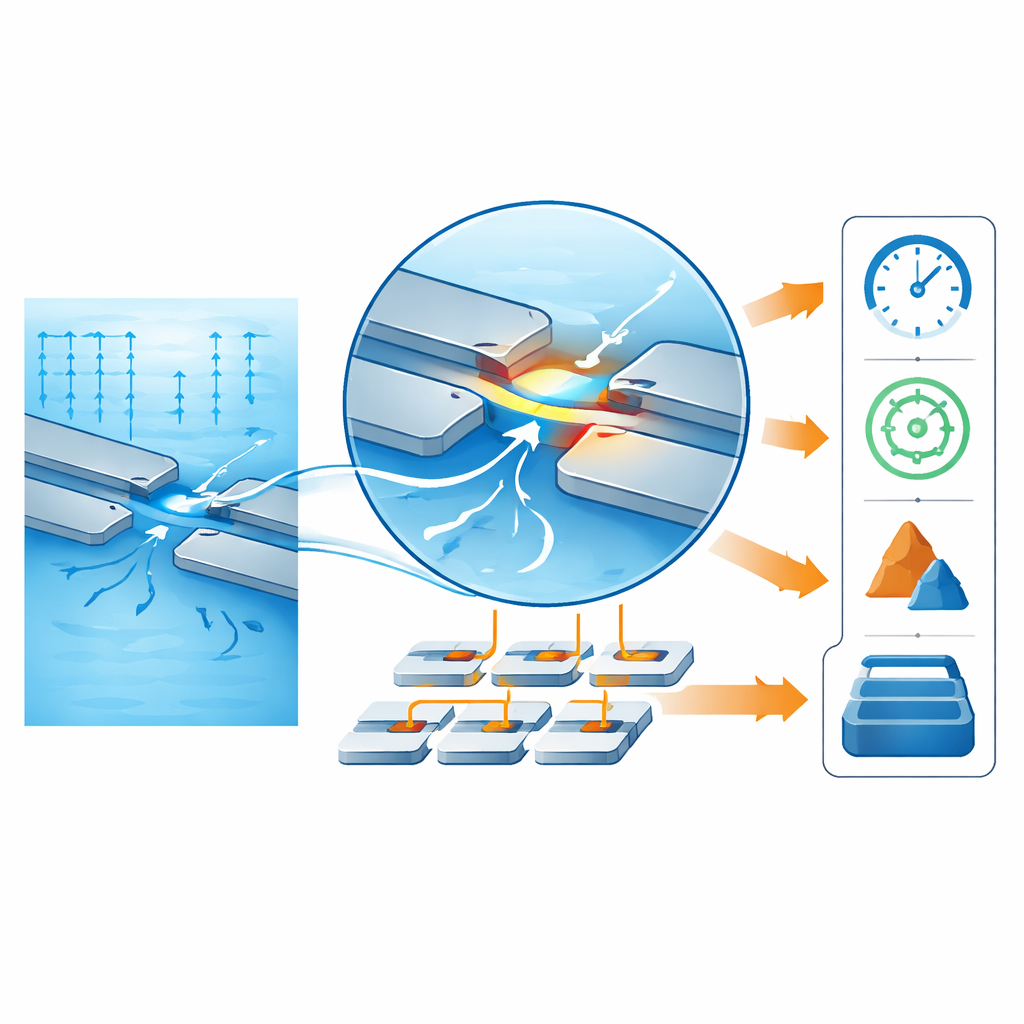
في قلب الجهاز رقاقة دقيقة تحتوي على شعاعين رفيعين مواجهين لبعضهما ويفصل بينهما فجوة ضيقة. يمكن للماء الانزلاق عبر هذه الفجوة من جانب الرقاقة إلى الجانب الآخر. عندما يكون الضغط على أحد الجانبين أعلى قليلاً من الآخر، يُدفَع الماء عبر الفجوة ويتسارع أثناء انضغاطه بين الشعاعين. موقد ميكروسكوبي وأشرطة معدنية حساسة للحرارة مدمجة عند طرف أحد الشعاعين. في الماء الراكد، يسخّن الموقد محيطه بشكل متساوٍ. عندما يندفع الماء عبر الفجوة، يأخذ معه الحرارة بقوة أكبر من جانب واحد، مغيرًا نمط الحرارة. من خلال مقارنة مجس قريب من الموقد مع مجس مرافق أبعد، يمكن للنظام كشف هذه التأثيرات التبريدية الطفيفة مع إلغاء أثر التغيرات البطيئة في حرارة الغرفة أو الماء.
بناء جهاز قياس صغير لكنه متين
استخدم الباحثون تقنيات تصنيع الرقائق الميكروية القياسية لنحت الشعاعين والفجوة من السيليكون وطلاؤهما بطبقة رقيقة واقية. استُخدمت عمليّة نحت كيميائي مُتحكم بها بعناية لتحرير الشعاعين بحيث يمكن أن يشكّلا قناة تدفق ضيقة دون التشقق. ثم أُحكم إغلاق رقاقة الاستشعار داخل حجرة ضغط صغيرة مزودة بمنافذ تتصل بالماء الخارجي. أظهرت الاختبارات في إعداد مملوء بالماء أن خرج المستشعر يزيد بسلاسة مع ازدياد فرق الضغط، مع استجابة قوية بشكل خاص عند الضغوط المنخفضة جدًا. يمكنه كشف فروق صغيرة تصل إلى حوالي 0.019 باسكال — أضعف بكثير من التغيرات الخلفية النموذجية — ويكرر قياساته بثبات مع انحراف طفيف فقط خلال أسبوع من التشغيل.
منح الروبوت حاسة سادسة هيدروديناميكية
لإظهار مدى فائدة هذه الحساسية، ركب الفريق ثلاثة من هذه المستشعرات في أنف نموذج روبوت مائي انسيابي. بينما تدفّق الماء عبر نفق اختبار، قاس كل مستشعر فرق الضغط بين نقطتين قريبتين على الهيكل. من هذه القراءات تعلّم شبكة عصبية بسيطة استنتاج كل من سرعة الروبوت ومقدار انحرافه بالنسبة للتدفق. عبر العديد من الاختبارات، تمكن النظام من تقدير السرعة بدقة تصل إلى بضعة مليمترات في الثانية والاتجاه بدقة تقارب درجة واحدة، حتى عند السرعات المنخفضة حيث الإشارات أضعف. في مجموعة ثانية من التجارب، استمعت نفس مصفوفة المستشعرات إلى أنماط الدوامة، المسماة شوارع فون كارمان، التي تُحدثها أجسام مختلفة موضوعة في أعلى مجرى الماء. من خلال تدريب نموذج تعلم آلي على بصمات هذه التدفقات، تمكن الروبوت من تمييز 20 شكلًا وحجمًا مختلفًا للعوائق بدقة تقارب 97.5%.
ماذا يعني هذا لآلات المحيط المستقبلية
بعبارة بسيطة، منح الباحثون الروبوتات تحت الماء «حاسة ماء» أكثر حدة، تشبه الطريقة التي تشعر بها الأسماك بالتيارات والأجسام القريبة. يُحوّل مستشعر الضغط الحراري التفاضلي الفروق الضئيلة في الضغط إلى تغييرات في درجة الحرارة سهلة القراءة، ويبقى دقيقًا ضمن نطاق مفيد دون أن يختلط عليه تأثير العمق العام. عند جمعها في مصفوفات وتفسيرها عبر برامج، تتيح هذه المستشعرات للروبوتات تتبع حركتها والتعرّف على العقبات باستخدام تدفق الماء المحيط فقط. مع مزيد من التطوير والدمج في إلكترونيات مدمجة، قد تساعد هذه التقنية روبوتات المحيط المستقبلية على الملاحة بأمان أكبر، والعمل في مياه أكثر عتامة وإزدحامًا، والمساهمة بشكل أفضل في استكشاف أكثر بيئات الأرض خفاءً.
الاستشهاد: Cao, Y., Ma, Z., Kang, H. et al. Calorimetric differential pressure sensor with high sensitivity for hydrodynamic perception. Microsyst Nanoeng 12, 146 (2026). https://doi.org/10.1038/s41378-026-01270-9
الكلمات المفتاحية: روبوتات تحت الماء, مستشعرات الضغط, استشعار مستوحى من الطبيعة, كشف التدفق, الإدراك الهيدروديناميكي