Clear Sky Science · ru
BGC‑LiteNet: встроенная в нейросеть лёгкая архитектура с кодом сетки BeiDou для обнаружения и локализации пожаров БПЛА в реальном времени
Наблюдая за лесом сверху
Лесные пожары могут превратиться из небольшой искры в катастрофу за считанные минуты. Дроны с тепловизионными камерами обещают выявлять такие возгорания на ранней стадии, но современные решения сталкиваются с трудным компромиссом: быстрые и лёгкие алгоритмы обычно пропускают крошечные ранние очаги, тогда как более тяжёлые и точные системы реагируют слишком медленно, чтобы быть полезными в экстренной ситуации. В этой работе предложен новый подход под названием BGC‑LiteNet, который стремится совместить оба требования — быстро обнаруживать мелкие пожары и почти в реальном времени определять их положение на карте даже на скромных бортовых вычислителях.
Почему раннее обнаружение пожаров так сложно
Пожары на ранней стадии в кадрах с дрона выглядят как всего несколько светящихся пикселей, зачастую скрытых дымом, тусклым освещением или сложным рельефом. Традиционные методы, основанные на простых порогах или вручную подобранных признаках изображения, быстры, но легко ошибаются на других источниках тепла и в меняющихся условиях. Современные методы глубокого обучения лучше распознают пожары, но обычно возвращают лишь позицию в изображении, а не реальные координаты на карте. Преобразование этих позиций в мировые координаты требует дополнительных шагов с учётом геометрии камеры, спутникового позиционирования и онлайн‑карт — каждый дополнительный шаг добавляет время (сотни миллисекунд и более) и зависит от стабильной связи, которая часто отсутствует в удалённых горах.
Встраивание карты внутрь нейросети
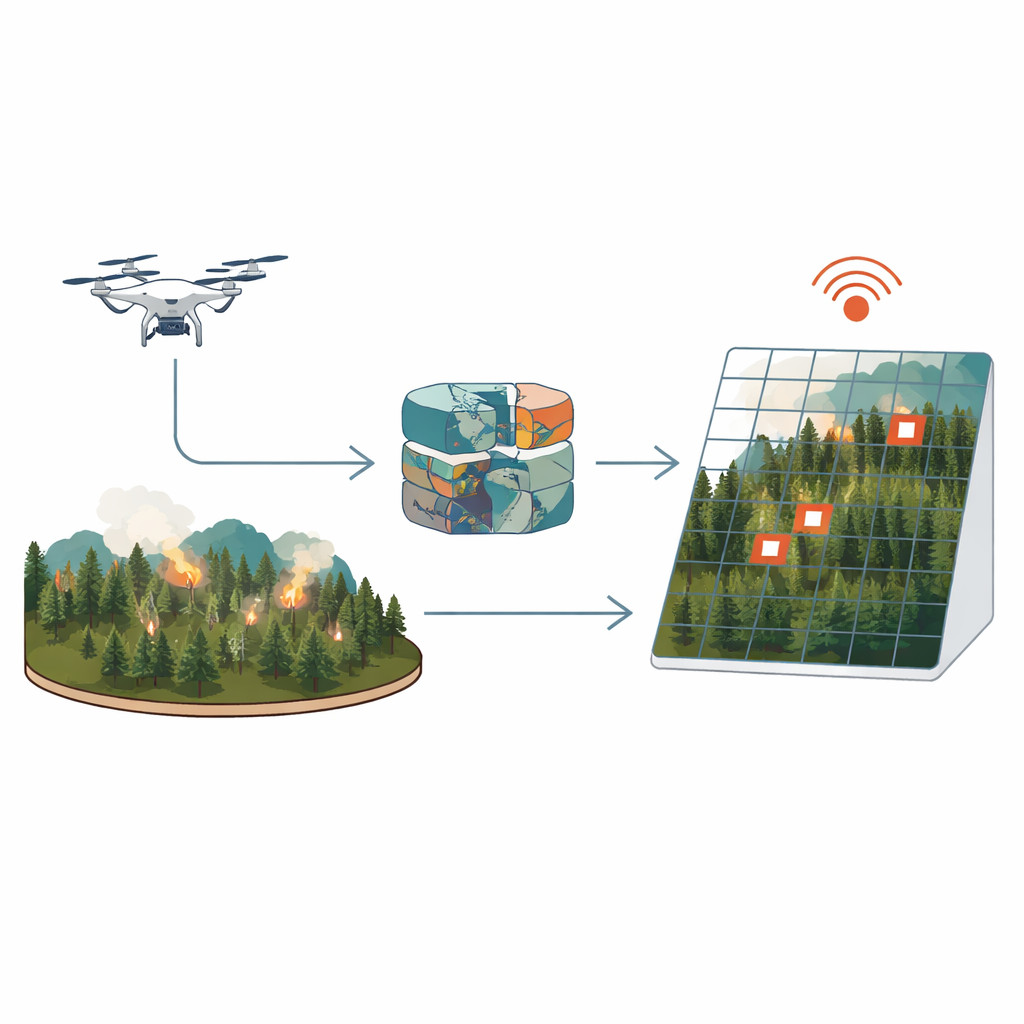
Вместо того чтобы оставлять картографирование на потом, BGC‑LiteNet интегрирует географию прямо в процесс детекции. Система использует китайский стандарт BeiDou Grid Code (BGC), который делит поверхность Земли на регулярную сетку ячеек примерно по 100 метров. Для каждого пикселя в инфракрасном изображении дрона вычисляется соответствующая наземная ячейка сетки и строится сопоставимая картограмма сетки. Эта картограмма затем переводится в набор обучаемых числовых кодов, которые передаются в нейросеть вместе с самим изображением. По сути, каждый пиксель несёт и визуальную подсказку, и географический ориентир, что позволяет модели учиться, где с большей вероятностью появляются пожары, и напрямую выдавать стандартные идентификаторы ячеек, без вызова внешних картографических сервисов.
Проектирование "мозга", который думает быстро
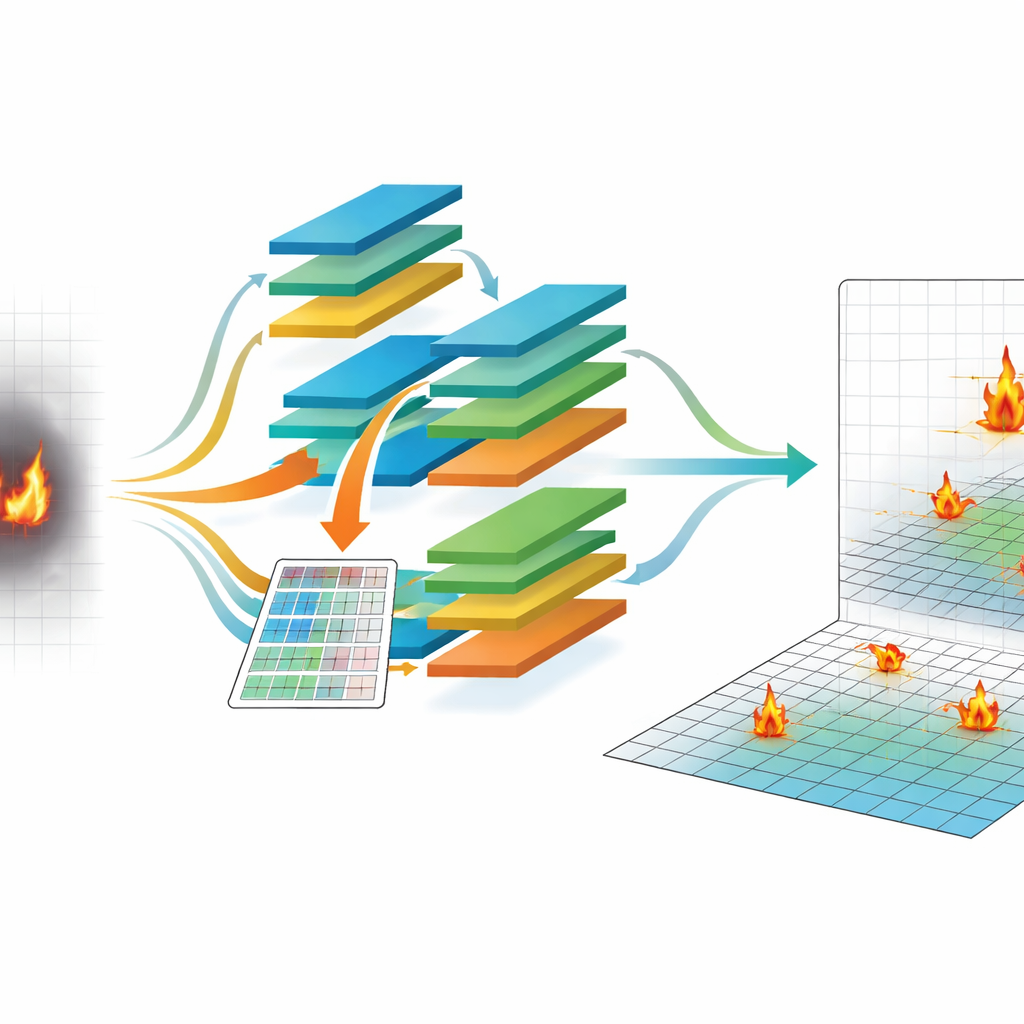
Встраивание географии — это лишь половина задачи; вторая — обеспечить быстрое выполнение на небольшом бортовом компьютере. Авторы используют технику поиска архитектуры нейросети (neural architecture search), которая автоматически перебирает множество вариантов архитектур, чтобы найти компромисс между точностью и скоростью. Они измеряют время выполнения базовых блоков — таких как компактные свёртки и модули внимания — на встраиваемом устройстве и направляют поиск так, чтобы медленные комбинации отбирались. Итоговая архитектура BGC‑LiteNet содержит менее миллиона параметров, в значительной степени опирается на эффективные свёрточные блоки и избавляется от лишних путей, что даёт среднее время обработки примерно 38 миллисекунд на изображение стандартного разрешения на модуле NVIDIA Jetson Xavier NX, установленном на дроне.
Испытание системы
Чтобы проверить работоспособность подхода в реальных условиях, команда собрала датасет почти из 13 000 снимков с дронов, сделанных над горами, равнинами, опушками леса и смешанной местностью в нескольких провинциях Китая. Каждое изображение сопровождается высокоточными данными о положении дрона и аннотациями пожаров, привязанными к ячейкам сетки BeiDou. На этой разнообразной коллекции дневных, ночных, задымлённых и ясных сцен BGC‑LiteNet достигает примерно 89 процентов mean average precision по обнаружению и обеспечивает более 92 процентов точности в геолокации в пределах 50 метров. Он превосходит как традиционные методы, так и популярные компактные модели глубокого обучения, особенно когда пожары малы, освещение слабое или дым плотный. Система также хорошо масштабируется для разных размеров изображений и остаётся отзывчивой даже на более высоких разрешениях.
От одиночных дронов к сетям пожаротушения
Точные и стандартизованные координаты критичны, когда несколько дронов и наземные группы должны работать согласованно. Поскольку BGC‑LiteNet выдаёт местоположения напрямую в национальной сетке, разные дроны автоматически «говорят на одном языке», что снижает расхождения в сообщаемых позициях. Тесты с моделированием патрулирования несколькими дронами показывают, что оценки положения одного и того же пожара у них сгруппированы гораздо плотнее, чем у методов, где для каждого платформы выполняется отдельная картографическая обработка. Исследователи также демонстрируют, что система продолжает работать в сложных условиях освещения, при дыме, дожде и тумане и может быть быстро преобразована в стандартные GPS‑подобные координаты для существующих картографических инструментов.
Что это значит для пожаротушения
BGC‑LiteNet показывает, что можно создать систему обнаружения пожаров на базе дронов, которая одновременно быстра и точна, если рассматривать картографирование как часть интеллекта, а не как дополнительный модуль. Встраивая национальную сетевую ссылку прямо в нейросеть и автоматически оптимизируя модель для маломощного железа, авторы добились быстрых и точных оповещений о пожарах, направляющих спасателей в пределах десятков метров от очага. За пределами лесных пожаров та же идея — обучать нейросети понимать не только что, но и где — может оказаться полезной в задачах учёта дикой природы, оценки ущерба при бедствиях и точного земледелия.
Цитирование: Yin, H., Yu, Y., Hong, A. et al. BGC-LiteNet: BeiDou grid code embedded lightweight neural architecture for real-time UAV fire detection and localization. Sci Rep 16, 14456 (2026). https://doi.org/10.1038/s41598-026-44728-6
Ключевые слова: обнаружение пожаров БПЛА, геопространственное глубокое обучение, edge AI, Grid Code BeiDou, локализация в реальном времени