Clear Sky Science · nl
BGC-LiteNet: BeiDou-gridcode ingesloten lichtgewicht neurale architectuur voor realtime branddetectie en -lokalisatie met UAV's
Het bos van bovenaf observeren
Bosbranden kunnen binnen enkele minuten van een klein vonkje uitgroeien tot een ramp. Drones met warmtesensorcamera’s beloven zulke branden vroeg te detecteren, maar huidige systemen staan voor een lastig compromis: snelle, lichtgewicht software mist vaak de kleine, beginnende vlammen, terwijl zwaardere, nauwkeurigere programma’s te traag reageren om in noodgevallen nuttig te zijn. Dit artikel introduceert een nieuwe aanpak genaamd BGC‑LiteNet die beide doelen tegelijk nastreeft — snel kleine branden detecteren en hun locaties vrijwel realtime op een kaart bepalen, zelfs op bescheiden boordcomputers.
Waarom vroege branddetectie zo moeilijk is
Branden in een vroeg stadium verschijnen in dronebeelden vaak als slechts een paar gloedende pixels, vaak verborgen door rook, zwak licht of een rommelig terrein. Traditionele methoden die rekenen op eenvoudige drempels of handgemaakte beeldkenmerken zijn snel maar worden makkelijk misleid door andere warmtesources en veranderende omstandigheden. Nieuwere deep‑learning systemen zijn beter in het herkennen van branden, maar geven meestal alleen beeldcoördinaten, geen echte kaartcoördinaten. Die beeldposities naar echte wereldlocaties omzetten vereist extra stappen met camerageometrie, satellietpositionering en online kaartdiensten. Elke extra stap kost tijd — honderden milliseconden of meer — en hangt af van betrouwbare communicatie, die in afgelegen berggebieden vaak niet beschikbaar is.
De kaart in het neurale netwerk stoppen
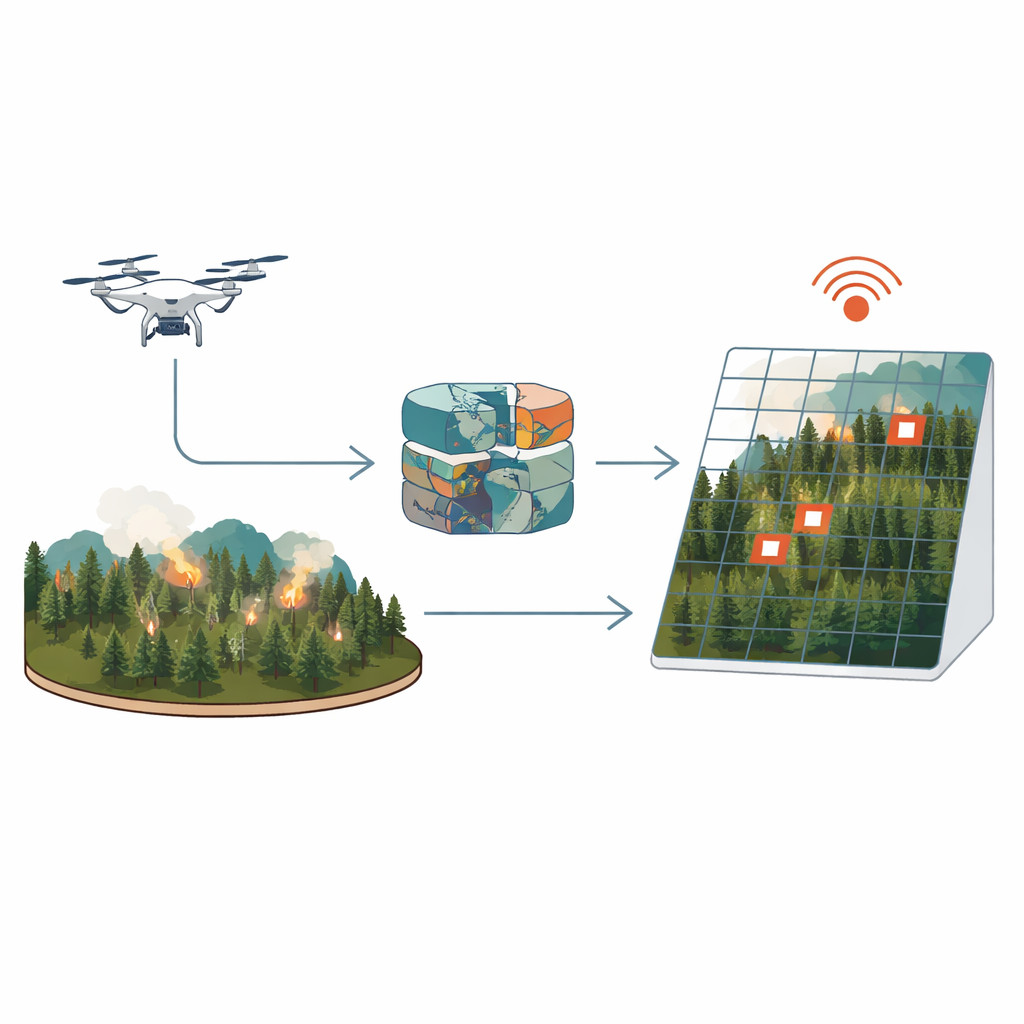
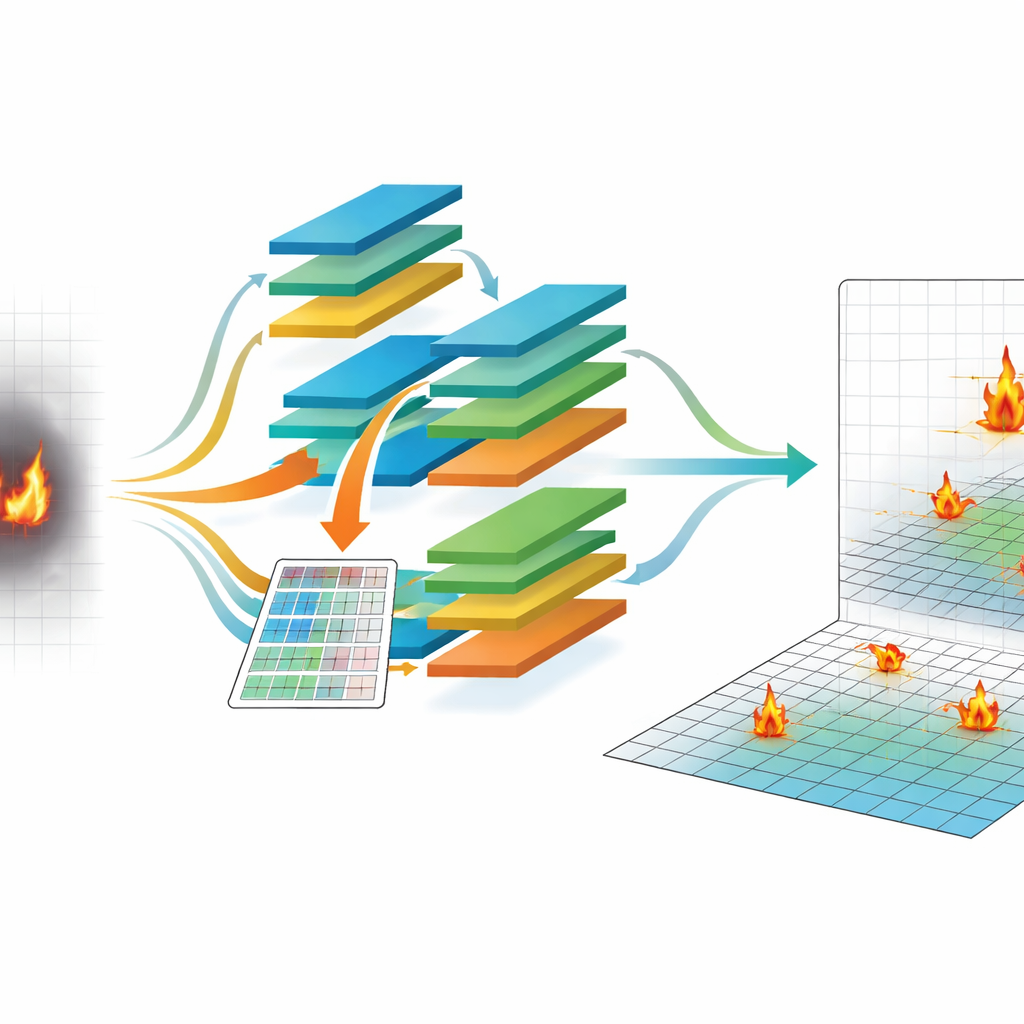
In plaats van cartografie als nagedachte te behandelen, bouwt BGC‑LiteNet geografie direct in het detectieproces. Het gebruikt China’s BeiDou Grid Code (BGC), een nationale standaard die de aarde indeelt in een regelmatig raster met cellen van ongeveer 100 meter. Voor elke pixel in een drone‑infraroodbeeld berekent het systeem tot welke rastercel op de grond die correspondeert en bouwt het een overeenkomende rasterkaart. Deze rasterkaart wordt vervolgens omgezet in een reeks leerbare numerieke codes die samen met het beeld het neurale netwerk ingaan. In feite krijgt elke pixel zowel een visuele aanwijzing als een geografische hint, waardoor het model kan leren waar branden waarschijnlijk verschijnen en direct gestandaardiseerde rasteridentificaties kan uitgeven, zonder externe kaartdiensten te hoeven aanroepen.
Een snel denkend brein ontwerpen
Geografie inbedden is slechts de helft van het verhaal; de rest is zorgen dat het snel draait op een kleine boordcomputer. De auteurs gebruiken een techniek genaamd neural architecture search, die automatisch vele mogelijke netwerkontwerpen test om die te vinden die nauwkeurigheid en snelheid in balans brengen. Ze meten hoe lang basale bouwstenen — zoals compacte convoluties en attention‑modules — nodig hebben om op een ingebed apparaat te draaien, en sturen de zoekprocedure zodat trage combinaties worden ontmoedigd. Het uiteindelijke BGC‑LiteNet‑ontwerp gebruikt minder dan één miljoen parameters, leunt sterk op efficiënte convoluties en snoeit onnodige paden, wat resulteert in een gemiddelde verwerkingstijd van ongeveer 38 milliseconden per beeld bij standaardresolutie op een NVIDIA Jetson Xavier NX‑module die door een drone wordt gedragen.
Het systeem op de proef stellen
Om te onderzoeken of deze aanpak in de echte wereld werkt, bouwde het team een dataset van bijna 13.000 dronebeelden verzameld boven bergen, vlaktes, bosranden en gemengd terrein in meerdere Chinese provincies. Elk beeld is gekoppeld aan zeer nauwkeurige drone‑positiedata en brandannotaties gelinkt aan BeiDou‑rastercellen. Over deze diverse verzameling van dag-, nacht-, rook- en heldere scènes detecteert BGC‑LiteNet branden met ongeveer 89 procent mean average precision en bereikt het meer dan 92 procent nauwkeurigheid bij het geolocaliseren binnen 50 meter. Het presteert beter dan zowel traditionele methoden als populaire compacte deep‑learningmodellen, vooral wanneer branden klein zijn, licht zwak is of rook dicht is. Het systeem schaalt ook goed over verschillende beeldformaten en blijft responsief zelfs bij hogere resoluties.
Van enkele drones naar brandbestrijdingsnetwerken
Nauwkeurige, gestandaardiseerde locaties zijn cruciaal wanneer meerdere drones en grondteams moeten samenwerken. Omdat BGC‑LiteNet locaties direct in een nationaal rastersysteem uitvoert, “spreken” verschillende drones automatisch dezelfde taal, wat meningsverschillen over gerapporteerde posities vermindert. Tests met gesimuleerde multi‑drone patrouilles tonen dat de locatie‑schattingen voor dezelfde brand strak gegroepeerd zijn, veel meer dan bij methoden die voor elk platform losse kaartstappen gebruiken. De onderzoekers laten ook zien dat het systeem blijft werken onder uitdagende lichtomstandigheden, rook, regen en mist, en snel kan worden omgezet naar standaard GPS‑achtige coördinaten voor bestaande kaarttools.
Wat dit betekent voor brandbestrijding
BGC‑LiteNet toont aan dat het mogelijk is een drone‑gebaseerd branddetectiesysteem te bouwen dat zowel snel als precies is door cartografie als onderdeel van de intelligentie te behandelen in plaats van als toevoeging. Door een nationaal rasterreferentie direct in het neurale netwerk in te bedden en het model automatisch te ontwerpen voor laagvermogenhardware, behalen de auteurs snelle, nauwkeurige brandmeldingen die hulpverleners binnen tientallen meters van een nieuw vuur kunnen leiden. Buiten bosbranden kan hetzelfde idee — neurale netwerken leren waar evenals wat — nuttig zijn voor andere taken zoals wildlife‑inventarisaties, rampenbeoordeling en precisielandbouw.
Bronvermelding: Yin, H., Yu, Y., Hong, A. et al. BGC-LiteNet: BeiDou grid code embedded lightweight neural architecture for real-time UAV fire detection and localization. Sci Rep 16, 14456 (2026). https://doi.org/10.1038/s41598-026-44728-6
Trefwoorden: UAV branddetectie, georuimtelijk deep learning, edge AI, BeiDou Grid Code, realtime lokalisatie