Clear Sky Science · ja
BGC-LiteNet:リアルタイムUAV火災検出と位置特定のための北斗グリッドコード埋め込み型軽量ニューラルアーキテクチャ
上空から森を見守る
森林火災は一筋の小さな火花が数分で大災害に発展することがあります。熱検出カメラを搭載したドローンは早期発見の有望な手段ですが、現行のシステムは厳しいトレードオフに直面しています。処理が速く軽量なソフトウェアは初期の小さな炎を見落としやすく、より重く高精度なプログラムは緊急時に役立つほど迅速には動作しません。本論文はBGC‑LiteNetと呼ばれる新しいアプローチを紹介します。これは小さな火災を素早く検出し、限られたオンボード計算機でもほぼリアルタイムで地図上の位置を特定することを目指しています。
なぜ初期火災の検出は難しいのか
初期段階の森林火災はドローン画像では数ピクセルの発光として現れ、しばしば煙や暗い照明、複雑な地形に隠れます。単純な閾値や手作りの画像特徴に頼る従来手法は高速ですが、他の熱源や変化する条件に簡単に騙されます。新しいディープラーニング手法は火災の認識に優れていますが、多くは画像上の位置のみを出力し、実際の地図座標を直接示しません。それらを実世界の位置に変換するには、カメラの幾何、衛星測位、オンライン地図サービスといった追加手順が必要です。各ステップは数百ミリ秒以上の時間を要し、遠隔地ではしばしば利用できない信頼できる通信に依存します。
地図をニューラルネットワークの内部に組み込む
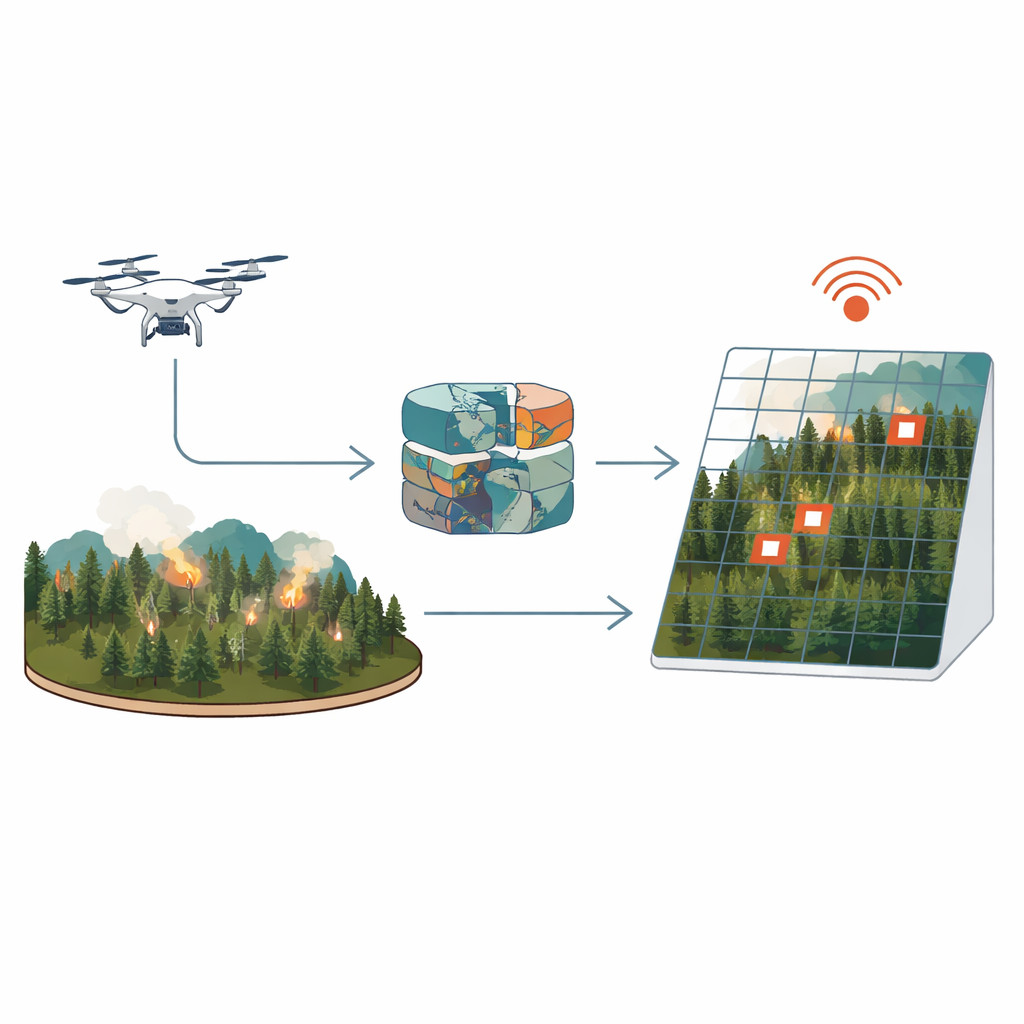
地図処理を後付けと扱う代わりに、BGC‑LiteNetは検出プロセスに地理情報を直接組み込みます。本手法は中国の国家標準である北斗グリッドコード(BGC)を用い、地球を約100メートル四方の規則的な格子に分割します。ドローンの赤外画像の各ピクセルについて、そのピクセルが地面上のどの格子セルに対応するかを計算して対応するグリッドマップを構築します。このグリッドマップは学習可能な数値コードのセットに変換され、画像とともにニューラルネットワークに入力されます。実質的に各ピクセルは視覚的手がかりと地理的ヒントを併せ持ち、モデルは火災が出現しやすい場所を学習して外部の地図サービスを呼び出さずに標準化されたグリッド識別子を直接出力できます。
素早く考える「脳」の設計
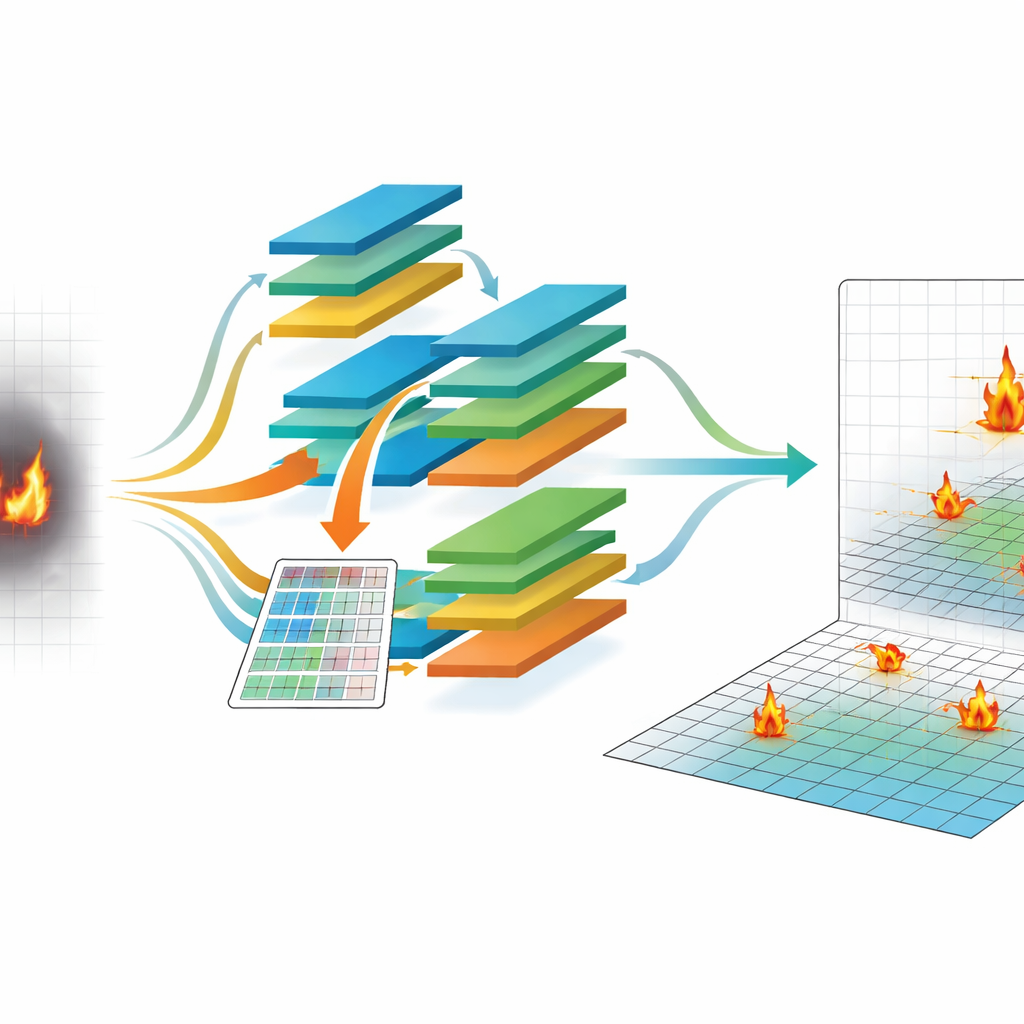
地理情報の埋め込みは全体の半分にすぎません。もう半分は小型のオンボード計算機上で高速に動作させることです。著者らはニューラルアーキテクチャサーチという手法を用い、多数のネットワーク設計を自動的に試して精度と速度を両立する構成を探します。コンパクトな畳み込みやアテンションモジュールなど、基本的な構成要素が組み込みデバイス上でどれだけの処理時間を要するかを計測し、遅い組み合わせを抑制するように探索を誘導します。最終的なBGC‑LiteNet設計は100万パラメータ未満で、効率的な畳み込みを多用し不要な経路を刈り込むことで、ドローン搭載のNVIDIA Jetson Xavier NXモジュール上の標準解像度画像で平均約38ミリ秒の処理時間を達成しています。
システムの実地検証
このアプローチが現実で有効かを確かめるために、研究チームは中国の複数省にわたる山地、平野、森林端、混合地形で収集した約13,000枚のドローン画像データセットを構築しました。各画像には高精度なドローン位置データと北斗グリッドセルに紐づいた火災アノテーションが添えられています。昼夜、煙や快晴といった多様なシーンを含むこのコレクション全体で、BGC‑LiteNetは約89%の平均適合率(mAP)で火災を検出し、50メートル以内での位置特定精度は92%以上を達成しました。特に火災が小さい場合、照明が乏しい場合、または煙が濃い場合に従来手法や一般的な軽量ディープラーニングモデルを上回ります。さらに本システムは異なる画像サイズに対してもスケール良く動作し、高解像度でも応答性を維持します。
単独ドローンから消防ネットワークへ
複数のドローンや地上チームが協調する場合、正確で標準化された位置情報は不可欠です。BGC‑LiteNetは国のグリッド体系で直接位置を出力するため、異なるドローンが自動的に「同じ言語」を話し、報告位置の不一致を減らします。模擬マルチドローン巡回テストでは、同一火災に対する位置推定の分散が非常に小さく、各プラットフォームで別個に地図変換を行う手法よりも集中的にまとまることが示されました。研究ではまた、暗所、煙、雨、霧といった厳しい条件下でもシステムが動作し続け、既存のマッピングツール向けに標準的なGPS形式の座標へ迅速に変換できることも示しています。
消防活動への意義
BGC‑LiteNetは、地図処理を付加機能ではなく知能の一部として扱うことで、ドローンベースの火災検出システムが高速かつ高精度で動作しうることを示しています。国家グリッド参照をニューラルネットワークに直接埋め込み、低消費電力ハードウェア向けに自動設計することで、著者らは出火から数十メートル単位で救助者を導ける迅速で正確な火災アラートを実現しました。森林火災にとどまらず、ニューラルネットワークに「何が」だけでなく「どこで」を教えるという同じ考え方は、野生動物調査、災害評価、精密農業など他の用途でも有益です。
引用: Yin, H., Yu, Y., Hong, A. et al. BGC-LiteNet: BeiDou grid code embedded lightweight neural architecture for real-time UAV fire detection and localization. Sci Rep 16, 14456 (2026). https://doi.org/10.1038/s41598-026-44728-6
キーワード: UAV火災検出, 地理空間ディープラーニング, エッジAI, 北斗グリッドコード, リアルタイム位置特定