Clear Sky Science · es
BGC-LiteNet: arquitectura neuronal ligera con código de cuadrícula BeiDou incrustado para detección y localización en tiempo real de incendios con UAV
Vigilando el bosque desde arriba
Los incendios forestales pueden pasar de una chispa a una catástrofe en minutos. Los drones equipados con cámaras sensibles al calor prometen detectar estos incendios de forma temprana, pero los sistemas actuales se enfrentan a un difícil compromiso: el software rápido y ligero suele perder las llamas pequeñas y tempranas, mientras que los programas más pesados y precisos responden demasiado despacio para ser útiles en una emergencia. Este artículo presenta un nuevo enfoque llamado BGC‑LiteNet que pretende lograr ambas cosas a la vez: detectar incendios pequeños con rapidez y localizar sus posiciones en un mapa casi en tiempo real, incluso en ordenadores de a bordo modestos.
Por qué es tan difícil detectar incendios tempranos
Los incendios en etapa inicial aparecen en las imágenes de los drones como solo unos pocos píxeles brillantes, a menudo ocultos por humo, luz tenue o terreno con mucha complejidad. Los métodos tradicionales que se basan en umbrales simples o características de imagen diseñadas manualmente son rápidos pero se confunden fácilmente con otras fuentes de calor y condiciones cambiantes. Los sistemas más recientes de aprendizaje profundo son mejores reconociendo incendios, pero por lo general solo ofrecen posiciones en la imagen, no coordenadas reales en el mapa. Convertir esas posiciones en ubicaciones del mundo real requiere pasos adicionales que implican geometría de cámara, posicionamiento satelital y servicios de mapa en línea. Cada paso añadido consume tiempo —centenares de milisegundos o más— y depende de comunicaciones fiables, que a menudo no están disponibles en montañas remotas.
Integrando el mapa dentro de la red neuronal
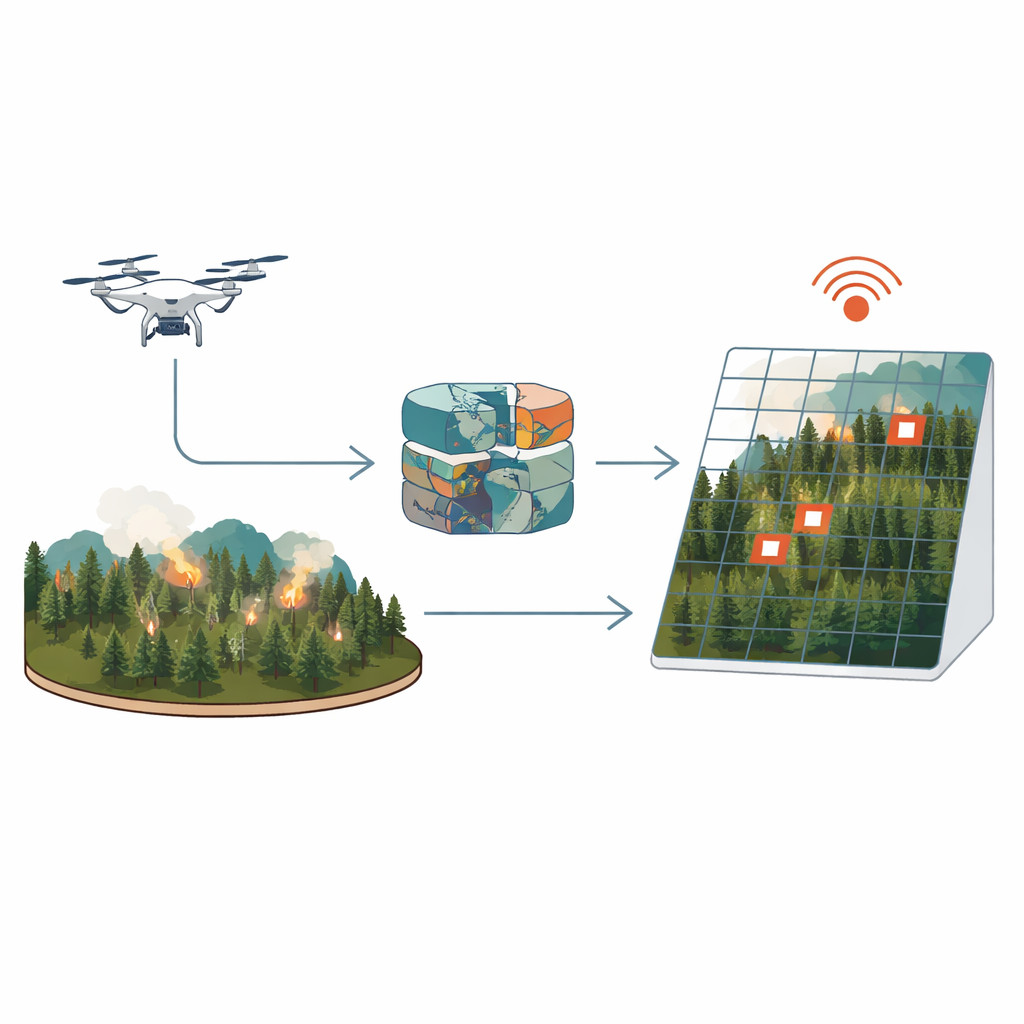
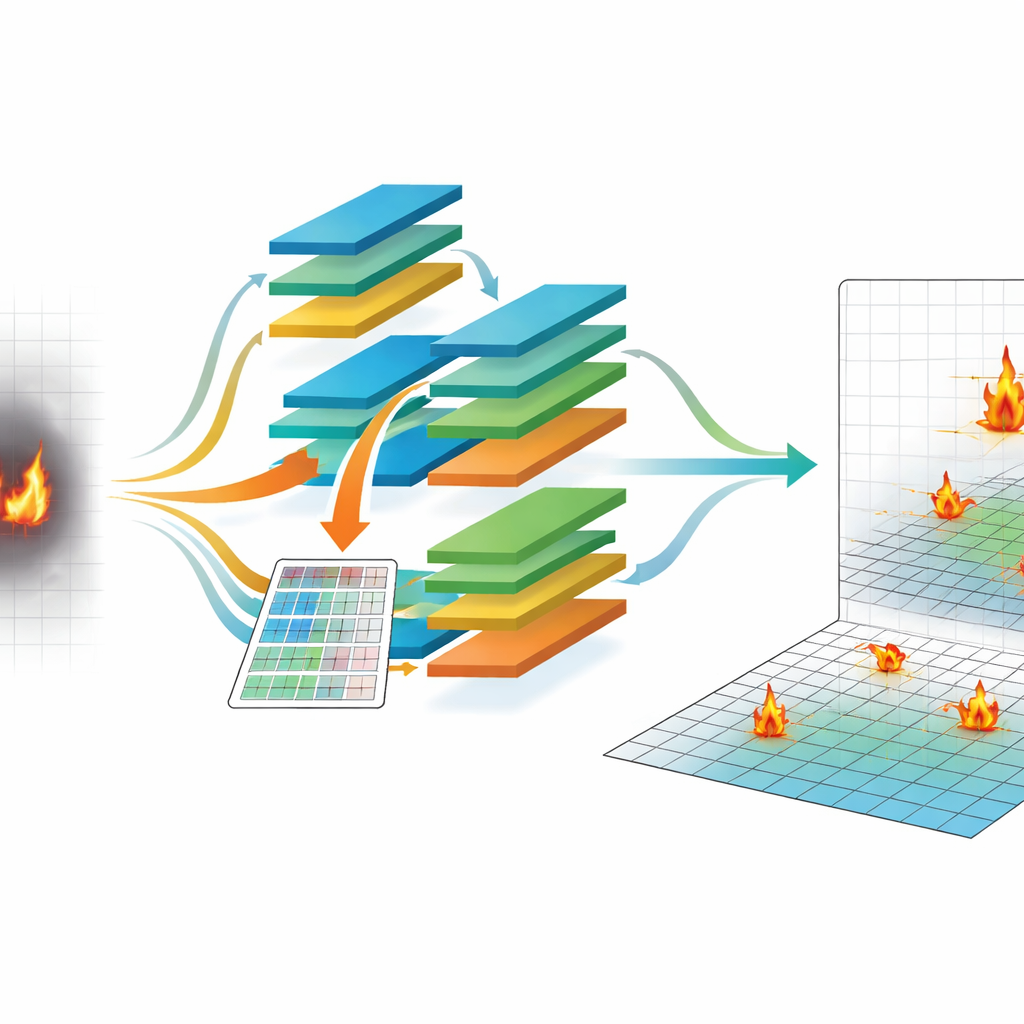
En lugar de tratar el mapeo como una idea secundaria, BGC‑LiteNet incorpora la geografía directamente en el proceso de detección. Utiliza el Código de Cuadrícula BeiDou (BGC) de China, un estándar nacional que divide la Tierra en una cuadrícula regular de celdas de aproximadamente 100 metros de lado. Para cada píxel en la imagen infrarroja del dron, el sistema calcula a qué celda de la cuadrícula terrestre corresponde y construye un mapa de cuadrícula correspondiente. Este mapa de cuadrícula se convierte luego en un conjunto de códigos numéricos aprendibles que viajan dentro de la red neuronal junto con la propia imagen. En efecto, cada píxel aporta tanto una pista visual como una pista geográfica, lo que permite al modelo aprender dónde es más probable que aparezcan incendios y emitir identificadores de cuadrícula estandarizados directamente, sin llamar a servicios de mapeo externos.
Diseñando un cerebro que piense rápido
Incrustar la geografía es solo la mitad de la historia; la otra mitad es lograr que funcione rápido en un pequeño ordenador de a bordo. Los autores usan una técnica llamada búsqueda de arquitectura neuronal, que prueba automáticamente muchas posibles configuraciones de red para encontrar aquellas que equilibran precisión y velocidad. Miden cuánto tarda en ejecutarse bloques básicos —como convoluciones compactas y módulos de atención— en un dispositivo embebido, y luego orientan la búsqueda para desalentar combinaciones lentas. El diseño final de BGC‑LiteNet utiliza menos de un millón de parámetros, se apoya en convoluciones eficientes y poda caminos innecesarios, resultando en un tiempo medio de procesamiento de alrededor de 38 milisegundos por imagen a resolución estándar en un módulo NVIDIA Jetson Xavier NX llevado por un dron.
Poniendo el sistema a prueba
Para comprobar si este enfoque funciona en el mundo real, el equipo construyó un conjunto de datos de casi 13.000 imágenes de drones recogidas sobre montañas, llanuras, bordes de bosque y terrenos mixtos en varias provincias chinas. Cada imagen va emparejada con datos de posición del dron de alta precisión y anotaciones de incendios vinculadas a celdas de la cuadrícula BeiDou. En esta colección diversa de escenas diurnas, nocturnas, con humo y claras, BGC‑LiteNet detecta incendios con aproximadamente un 89 por ciento de precisión media promedio (mAP) y logra más del 92 por ciento de exactitud al geolocalizarlos dentro de 50 metros. Supera tanto a métodos tradicionales como a modelos populares de aprendizaje profundo compactos, especialmente cuando los incendios son pequeños, la iluminación es baja o el humo es denso. El sistema también escala bien a diferentes tamaños de imagen y se mantiene reactivo incluso a resoluciones más altas.
De drones individuales a redes de extinción
Las ubicaciones precisas y estandarizadas son cruciales cuando múltiples drones y equipos en tierra deben cooperar. Dado que BGC‑LiteNet emite ubicaciones directamente en un sistema de cuadrícula nacional, diferentes drones automáticamente «hablan el mismo idioma», reduciendo desacuerdos en las posiciones reportadas. Pruebas con patrullas simuladas de múltiples drones muestran que sus estimaciones de ubicación para un mismo incendio están estrechamente agrupadas, mucho más que las de métodos que dependen de pasos de mapeo separados para cada plataforma. Los investigadores también demuestran que el sistema sigue funcionando bajo condiciones desafiantes de iluminación, humo, lluvia y niebla, y que puede convertirse rápidamente a coordenadas tipo GPS para herramientas de mapeo existentes.
Qué significa esto para la lucha contra incendios
BGC‑LiteNet demuestra que es posible construir un sistema de detección de incendios basado en drones que sea a la vez rápido y preciso al tratar el mapeo como parte de la inteligencia y no como un añadido. Al incrustar una referencia de cuadrícula nacional directamente en la red neuronal y diseñar automáticamente el modelo para hardware de bajo consumo, los autores logran alertas rápidas y precisas que pueden guiar a los equipos de respuesta a decenas de metros de un nuevo foco. Más allá de los incendios forestales, la misma idea —enseñar a las redes neuronales a entender el dónde además del qué— podría ser útil en tareas como censos de fauna, evaluación de desastres y agricultura de precisión.
Cita: Yin, H., Yu, Y., Hong, A. et al. BGC-LiteNet: BeiDou grid code embedded lightweight neural architecture for real-time UAV fire detection and localization. Sci Rep 16, 14456 (2026). https://doi.org/10.1038/s41598-026-44728-6
Palabras clave: detección de incendios con UAV, aprendizaje profundo geoespacial, IA en el borde, Código de Cuadrícula BeiDou, localización en tiempo real