Clear Sky Science · ja
単眼・ステレオ・RGB-Dカメラに対応したスケール認識密度動的SLAM
動き続ける、変わる世界に対応する賢いデジタル地図
ロボットやドローン、拡張現実ヘッドセットはいずれも、安全かつ滑らかに移動するために周囲の詳細な理解を必要とします。しかし、人が通り過ぎたり車が横切ったり、家具が動かされたりすると、多くのマッピングシステムはつまずきます。本論文はSDMFusionを導入します。これは、カメラ周辺の世界が動きに満ちているときでもリアルタイムで豊かで正確な3D地図を構築でき、複数の一般的なカメラ種別で動作する新しいマッピング手法です。
従来のビジョンシステムが不十分な理由
多くのロボットはビジュアルSLAMに依存しており、これはカメラが自己位置を推定しながら同時に地図を構築する技術です。従来のシステムは世界がほぼ静止していることを前提とし、しばしば少数の追跡点からなる疎な地図しか生成しません。また単眼カメラでは、シーンの実際の大きさ(スケール)を判別できないために苦労します:レンズに近い小さなおもちゃが遠くの大きな物体のように見えることがあります。動く人や物体はこれらの手法を混乱させ、カメラの推定軌跡がずれたり地図が信頼できなくなったりします。これらの弱点は、低コストなカメラを実際の家庭や通り、職場で使うことを制限します。
信頼できるマッピングのための三つのエンジン
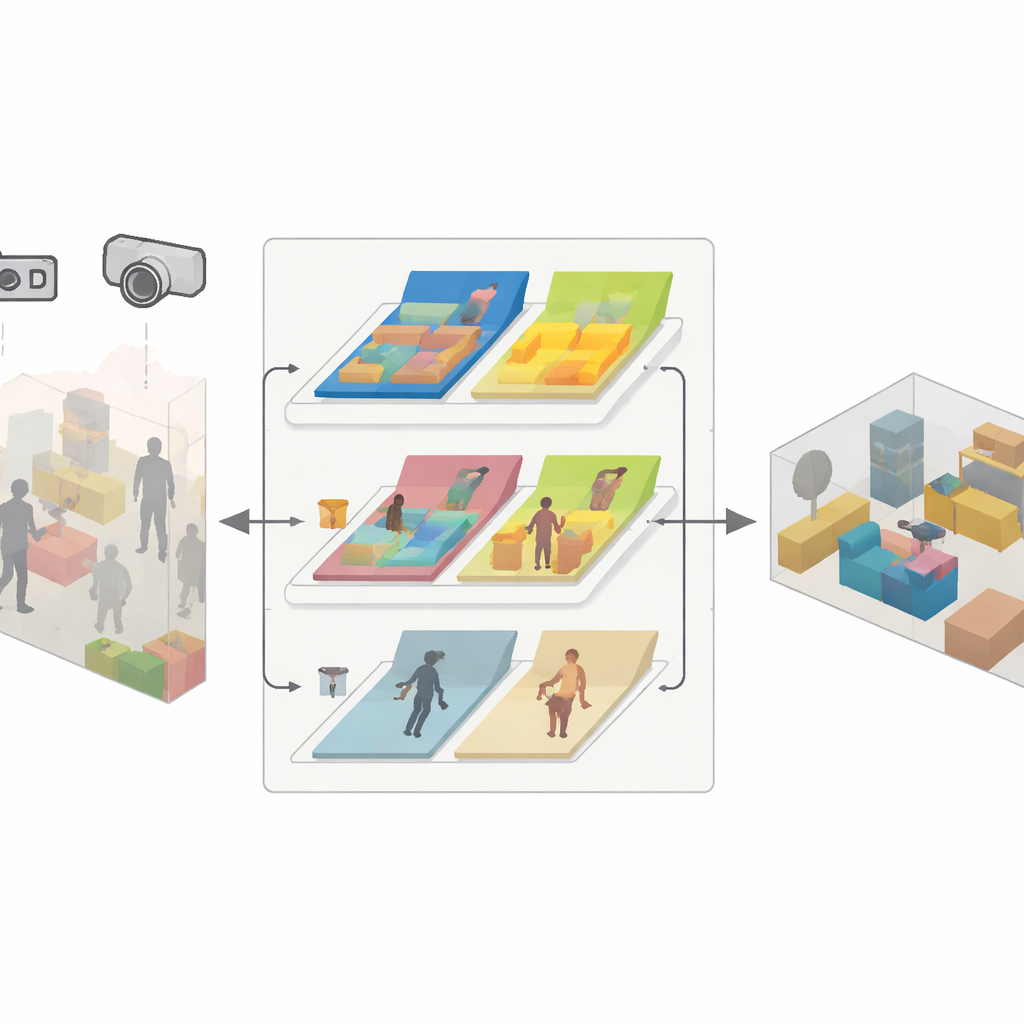
SDMFusionは広く使われるORB-SLAM3の上に構築されており、これらの課題を克服するために密接に連携する三つのモジュールを追加しています。第一に、スケール–深度モジュールは各画像をDepthAnythingV2という強力なニューラルネットワークに入力し、ピクセルごとの距離を推定します。単眼カメラではこの予測が実世界のスケールの欠落を補い、ステレオやRGB-Dカメラでは生の深度読み取りのギャップを平滑化・補完するために使われます。第二に、動的特徴モジュールは最新のYOLO系に触発された高速セグメンテーションネットワークを用いて、動きそうな物体を検出します。人や車、椅子のような移動可能性のある物体をグループ化し、フレーム間で実際に動いているかを幾何学的一貫性テストで特徴点ごとに確認します。実際に動く部分に属する特徴のみが破棄され、安定した特徴は精密なトラッキングを支えるために保持されます。第三に、反動的再構築モジュールは、精緻化された深度、信頼できるカメラ姿勢、および静的ピクセルのマスクを用いて、動いていない部分だけを密な3D地図に融合します。
実際の性能
著者らはSDMFusionを、三つのよく知られた公開データセットと小型ドローンで自ら撮影したシーンで広範なテストにかけました。選択したデータセットは屋外走行、乱雑な屋内、歩行・着座・箱の持ち上げなど人が多く動く動的な状況を含み、単眼・ステレオ・RGB-Dの各カメラで記録されています。SDMFusionはORB-SLAM3、DS-SLAM、DynaSLAM、RDS-SLAMなどの複数の先進的システムと比較され、推定されたカメラ経路が真値にどれだけ近いかを示す標準的な指標が用いられました。ほとんどのシーケンスで、SDMFusionは特に最も困難な動的シーンやスケール推定が最も難しい単眼設定で、より低い誤差と高い成功率を達成しました。視覚的にも、その密な地図はより完全で、動く人が誤って静的環境に融合されたときに現れる「幽霊」やぼやけた形状が除かれています。

長所、限界、今後の方向性
結果は、強力な深度予測、動的物体への慎重な対処、選択的な再構築を組み合わせることで、詳細かつ信頼できる地図が得られることを示しています。SDMFusionは高性能なデスクトップGPU上でリアルタイムに動作し、組み込み機器上では遅くなりますが、DepthネットワークをTensorRTで最適化することで大幅な速度向上を実証しています。またアブレーション研究を通じて各モジュールの重要性を検証し、スケール回復、セグメンテーション、運動チェックがいずれも精度と堅牢性に顕著に寄与していることを確認しています。それでも、視野のほぼ全てが単一の動く物体で占められる場合には、静的領域がほとんど残らず失敗することがあり、非常に複雑なシーンでは単眼の性能はステレオやRGB-Dに比べて依然劣ります。
日常のロボットにとっての意味
一般の観察者にとっての主な結論は、SDMFusionがカメラベースのマッピングを、ロボットやAR機器に期待される挙動に近づけるという点です:スケール付きの密な3Dモデルを構築し、適切に人やその他の動くものを無視し、自身の位置を高い信頼性で追跡します。小型デバイスや極めて混雑したシーンでの改善余地は残るものの、本研究は軽量カメラだけで忙しい家庭、オフィス、通りをナビゲートできる手頃な機械への明確な道筋を示しています。
引用: Cen, N., Xu, Y., Wong, TW. et al. Scale aware dense dynamic SLAM for monocular, stereo and RGBD cameras. Sci Rep 16, 10285 (2026). https://doi.org/10.1038/s41598-026-41208-9
キーワード: ビジュアルSLAM, 3Dマッピング, ロボットナビゲーション, 動的環境, 深度推定