Clear Sky Science · zh
基于预应力压电堆的折伸式微型超声外科器械
更小的器械带来更温和的骨外科手术
外科医生在切骨时,既需要准确与可控,又希望尽量少干扰周围组织。超声骨刀通过极快振动达到低力高精度切割,已有助力临床,但现有商业产品为体积较大的手持工具。它们过于笨重和刚性,无法穿过微创手术常用的狭窄入路,也难以安装在具有灵活关节的手术机器人腕端。本研究介绍了一种微型超声骨切割器,旨在在狭小空间内工作并由机器人臂携带,为脊柱和颅骨等部位开展更精细、侵入性更低的手术打开了可能。
缩小超声刀片的新途径
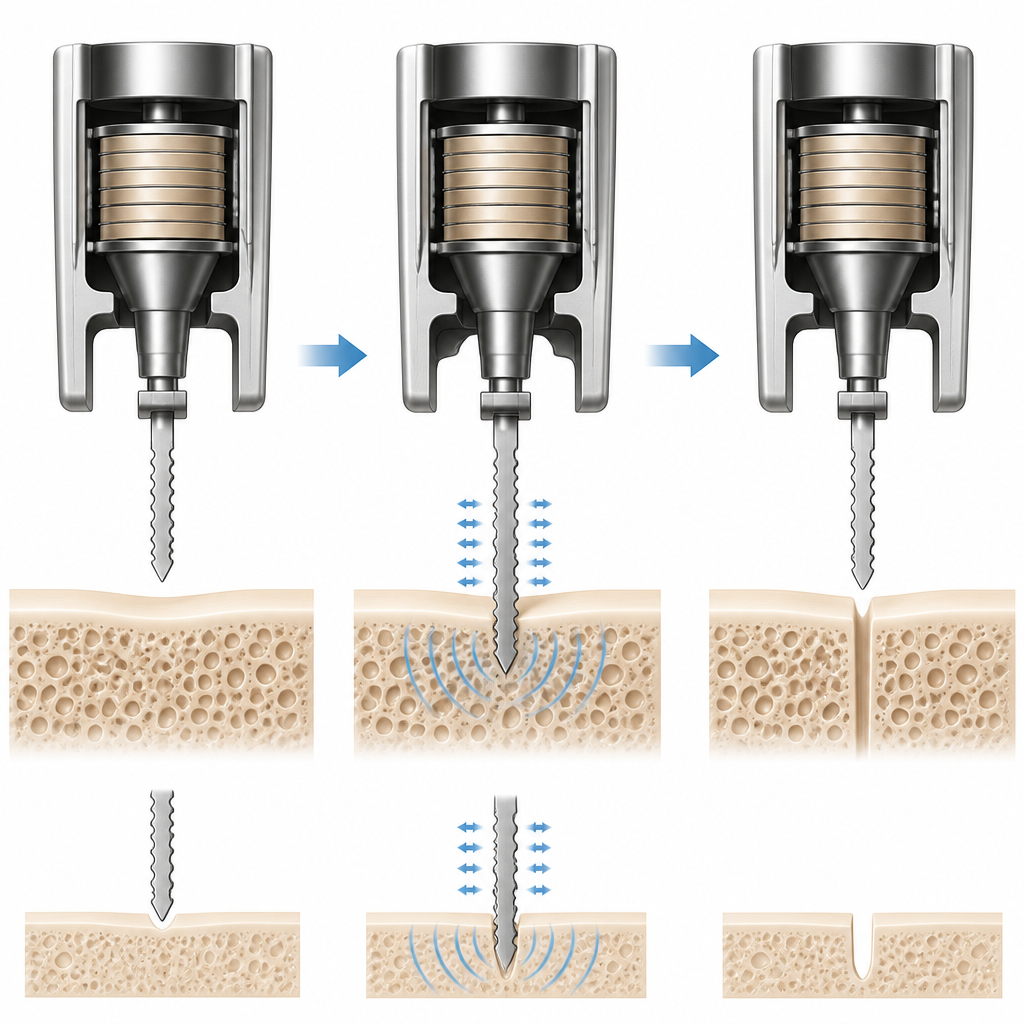
标准超声骨刀以一组用螺栓压紧的陶瓷环堆叠为核心,这类堆栈需要一定长度才能高效振动。若简单缩短该结构,振动模式会改变,刀尖位移减小,刀片变得无法有效切骨。其他提出的微型设计要么无法产生足够刀片位移,要么依赖在强振动下会失效的粘接接头。研究团队通过重新构思布局解决了这些问题:他们制造了一个紧凑的金属框架,一侧可像弹簧一样弯曲变形而另一侧保持固定,并用一根螺钉与螺母将紧压的陶瓷环堆固定驱动。该折伸(flextensional)框架充当机械放大器:陶瓷堆的微小运动在切削端被放大为较大的位移。整个器械大约手指大小,足够细以通过常见的手术通道,同时保留空间与机器人腕端连接。
让微小刀片产生强劲且可靠的运动
由于结构形状特殊,新装置在通电时表现与传统超声刀有显著不同。电学测试显示其对电流有较高阻抗并像电容器一样储能,这使得驱动效率变得更难。团队通过计算模型与激光测量仔细测量了结构的振动,证实工作侧强烈弯曲而连接侧与陶瓷堆几乎保持静止与笔直。随后他们设计了由电感和电容组成的匹配电路,以调整供电系统“看到”该器件的方式,从而将更多电能转换为刀片处的机械运动。经此调谐后,微型器械在刀尖处实现了约40至60微米的振幅,这一水平根据先前研究已足以切割骨组织。
以低力高可控性进行骨切割测试
为评估切割效果,研究人员先将装置安装在实验台架上,用其锯切猪肋骨切片——其与人体骨骼相似。他们通过改变刀片推进速度和振幅,测量了横向切削力与向下的穿透力。当刀片振幅较大且推进缓慢时,各项力值保持在一牛以下,远低于非超声切割时的水平,且电学读数稳定。在较高推进速率下,器械更难以控制,出现振动偏离理想频率的迹象。切割断面的图像显示最佳设置能产生深而干净的缝隙;较差设置则导致结果不一致。测试还表明切割处会产生热量,强调未来需要像商业系统那样加入冷却手段。
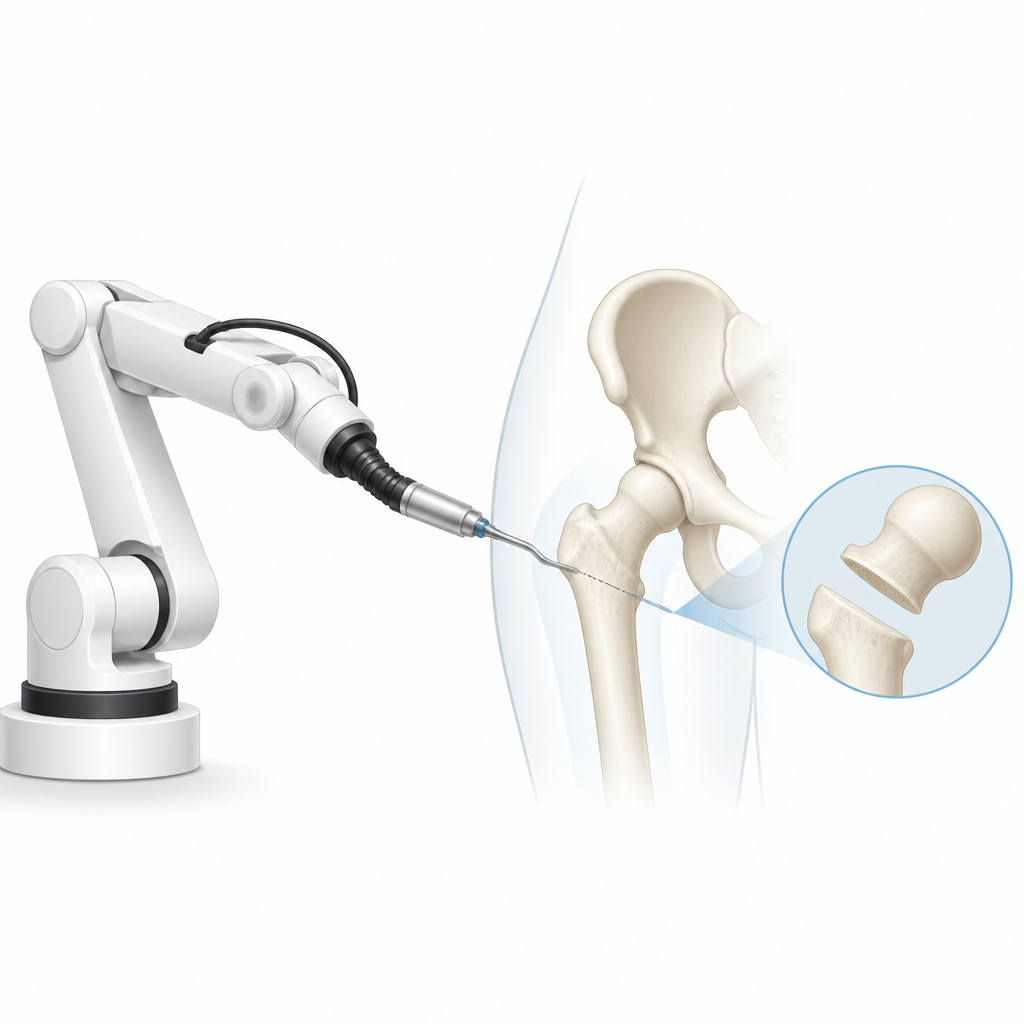
将该器械装到手术机器人上
随后,研究人员通过精细定位平台和力传感器将微型装置安装在高精度的库卡(Kuka)机器人臂上。在该配置中,机器人引导器械以重复的短行程横向扫动骨面并缓慢加深切口,类似外科医生延伸切口的方式。在这些条件下,切削力、侧向力与垂向力即便在刀片切得更深和移动更快时也都保持在一牛以下。机器人附加的位置调节能力有助于维持略宽于刀片本体的通道,从而降低摩擦。显微检查显示所得切口壁面锋利、崩裂极少,切口宽度与刀片厚度相差约六个百分点,表明精度优异。切削尖端的温度随速度上升,但在该体外测试中仍在可控范围内。
对未来手术的意义
这项工作表明,一个拇指大小的超声骨切割器既能产生外科所需的位移与力,又能保持足够小以装配在灵活的机器人腕端。通过将巧妙的机械框架、为保持振动调谐而定制的电子电路,以及对切割速度与深度的谨慎控制相结合,研究者在使用极低力的情况下实现了骨组织的干净、狭窄切割。若能加入冷却并进一步优化刀片形状与机器人控制,类似器械有望在未来通过微小开口帮助外科医生在脊柱或颅骨等拥挤区域切除骨组织,从而减少创伤并在不牺牲精度的情况下改善手术可及性。
引用: Li, X., Jones, D., Valdastri, P. et al. A miniature ultrasonic surgical device based on a flextensional configuration with a pre-stressed piezoelectric stack. Commun Eng 5, 95 (2026). https://doi.org/10.1038/s44172-026-00651-2
关键词: 超声骨外科, 机器人手术, 微创, 外科器械, 骨切割