Clear Sky Science · sv
En miniatyr ultraljudskirurgisk apparat baserad på en flextensional konfiguration med en förspänd piezoelektrisk stapel
Mindre verktyg för skonsammare bencirurgi
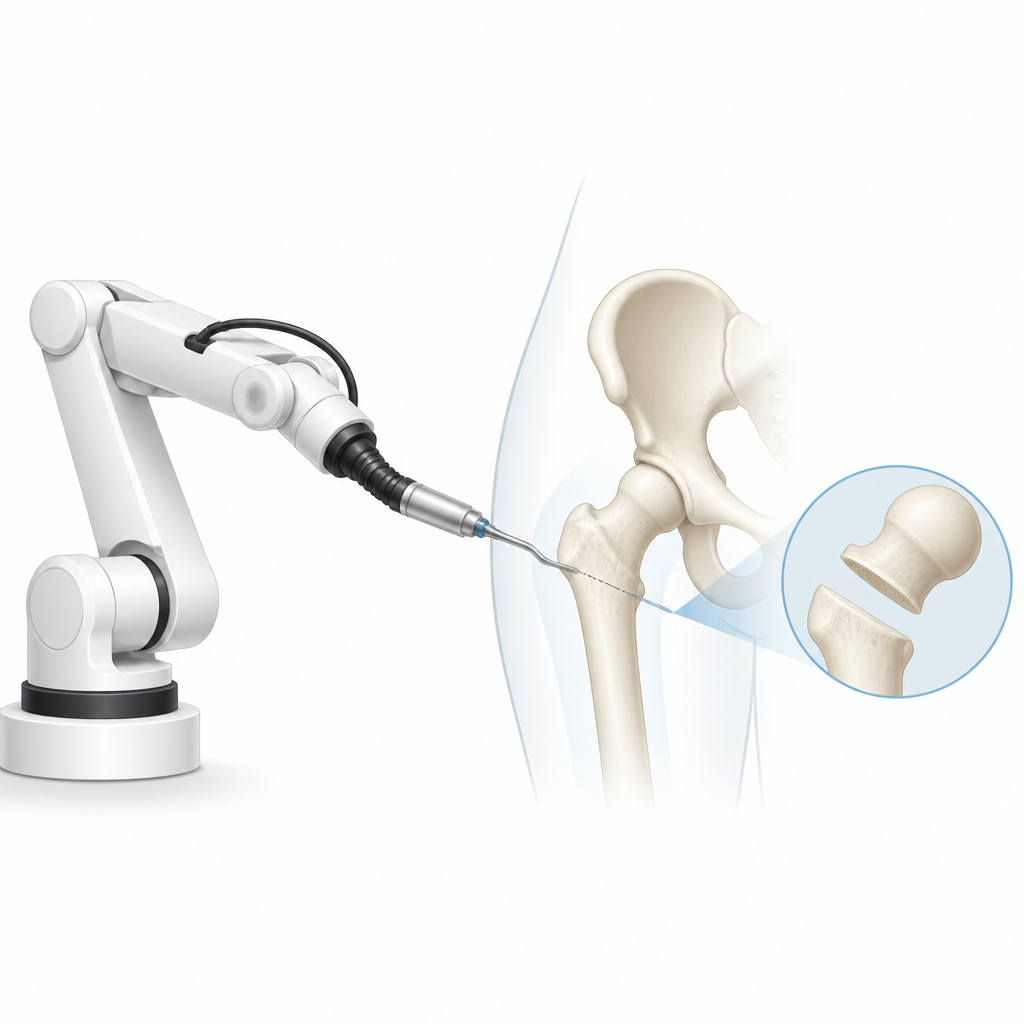
När kirurger skär i ben vill de ha noggrannhet och kontroll samtidigt som de stör så lite omkringliggande vävnad som möjligt. Ultraljudsbenknivar hjälper redan till genom att vibrera så snabbt att de skär med låg kraft och hög precision, men dagens kommersiella varianter är skrymmande handverktyg. De är för stora och för stela för att kunna passera genom de smala ingångarna som används vid titthålskirurgi eller för att monteras på den flexibla leden hos kirurgiska robotar. Den här studien presenterar ett miniatyriserat ultraljudsverktyg för benskärning som är utformat för att fungera i trånga utrymmen och kunna bäras av en robotarm, vilket öppnar för mer försiktiga, mindre invasiva ingrepp i ryggraden och skallen.
Ett nytt sätt att krympa ett ultraljudsblad
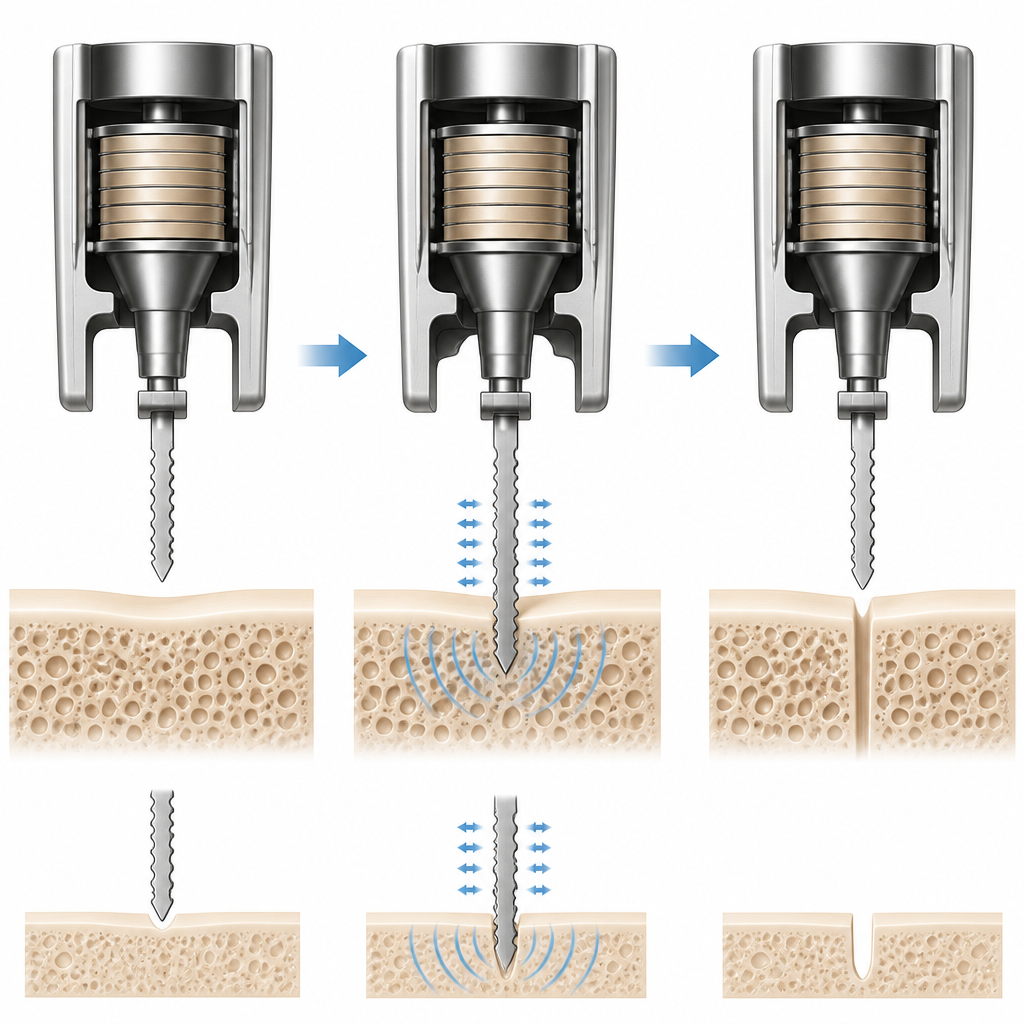
Standardinstrument för ultraljudsben är byggda kring en skruvad stapel av keramiska ringar som måste ha en viss längd för att vibrera effektivt. Om man bara förminskar den här konstruktionen ändras vibrationsmönstret, spetsens rörelse minskar och bladet blir för svagt för att skära i ben. Andra föreslagna miniatyrlösningar kan antingen inte förflytta bladet tillräckligt långt eller förlitar sig på limfogar som ger vika vid stark vibration. Forskarna löste detta genom att tänka om layouten. De byggde en kompakt metallram formad för att flexa som en fjäder på ena sidan samtidigt som den hålls stabil på den andra, och de drev den med en hårt ihopklämd stapel av keramiska ringar som hålls på plats av en skruv och muttrar. Denna "flextensionella" ram fungerar som en mekanisk förstärkare: små rörelser i den keramiska stapeln omvandlas till mycket större rörelser vid skärbladet. Hela apparaten är bara ungefär i fingrets storlek och tillräckligt smal för att passera genom vanliga kirurgiska åtkomströr, samtidigt som det finns plats för att ansluta till en robothandled.
Få ett litet blad att röra sig kraftfullt och pålitligt
Tack vare sin ovanliga form beter sig den nya apparaten mycket annorlunda än traditionella ultraljudsblad när den drivs. Elektriska tester visade att den har ett högt motstånd mot ström och lagrar elektrisk energi som en kondensator, vilket gör den svårare att driva effektivt. Teamet mätte noggrant hur strukturen vibrerar med hjälp av datormodeller och laserbaserade mätningar och bekräftade att arbetsidan flexar starkt medan anslutningssidan och den keramiska stapeln förblir nästan stilla och raka. De konstruerade sedan en elektronisk matchningskrets bestående av spolar och kondensatorer för att stämma av hur strömförsörjningen "ser" apparaten, så att mer elektrisk energi omvandlas till rörelse vid bladet. Med denna avstämning uppnådde miniatyrverktyget vibrationsutslag på omkring 40 till 60 mikrometer vid bladspetsen, en nivå som tidigare arbete visat är tillräcklig för att skära ben.
Testning av benskärning med låg kraft och hög kontroll
För att ta reda på hur väl apparaten skär monterade forskarna den först på ett laboratorieteststativ och använde den för att såga genom delar av grissida, som liknar mänskligt ben. Genom att variera hur snabbt bladet trycktes in i benet och hur långt det vibrerade mätte de både sidkrafter vid skärning och nedåtriktade penetrationskrafter. När bladet vibrerade kraftigt och avancerade långsamt höll sig krafterna under en newton, långt lägre än vid icke-ultraljudsbearbetning, och de elektriska mätningarna förblev stabila. Vid högre framåthastigheter blev apparaten svårare att kontrollera, med tecken på att dess vibration drev bort från idealrytmen. Bilder av snitten bekräftade att de bästa inställningarna gav djupa, rena spår medan sämre inställningar ledde till mindre konsekventa resultat. Dessa tester visade också att värme kan byggas upp vid snittet, vilket understryker behovet av kylning i framtida system, liknande kommersiella apparater.
Att föra verktyget till en kirurgisk robot
Nästa steg var att fästa miniatyrapparaten på en högprecisions Kuka-robotarm via en finpositioneringsplattform och en kraftsensor. I denna uppställning guidade roboten verktyget genom upprepade korta slag över benet samtidigt som djupet ökades långsamt, liknande hur en kirurg kan förlänga ett snitt. Under dessa förhållanden hölls skär-, sid- och vertikalkrafterna alla under en newton även när bladet skar djupare och rörde sig snabbare. Robotens extra frihet att justera position hjälpte till att bibehålla ett något vidare gap än själva bladet, vilket minskade friktionen. Mikroskopisk inspektion av de resulterande snitten visade skarpa väggar, minimalt flisning och bredder inom cirka sex procent av bladets tjocklek, vilket indikerar utmärkt precision. Temperaturerna vid klipptippen steg med hastigheten men förblev hanterbara för dessa in vitro-test.
Vad detta kan innebära för framtida operationer
Denna studie visar att en tumstor ultraljudsapparat för benskärning kan generera den rörelse och kraft som krävs för kirurgi samtidigt som den förblir tillräckligt liten för att monteras på en flexibel robothandled. Genom att kombinera en genomtänkt mekanisk ram, skräddarsydd elektronik för att hålla vibrationerna stämda samt noggrann kontroll av skärhastighet och djup uppnådde forskarna rena, smala snitt i ben med mycket låga krafter. Med tillsatt kylning och vidare anpassning av bladets form och robotstyrning kan liknande verktyg en dag hjälpa kirurger att avlägsna ben i trånga områden i ryggraden eller skallen genom små öppningar, minska trauma och förbättra åtkomst utan att offra precision.
Citering: Li, X., Jones, D., Valdastri, P. et al. A miniature ultrasonic surgical device based on a flextensional configuration with a pre-stressed piezoelectric stack. Commun Eng 5, 95 (2026). https://doi.org/10.1038/s44172-026-00651-2
Nyckelord: ultraljuds bencirurgi, robotkirurgi, minimalt invasivt, kirurgiska instrument, benskärning