Clear Sky Science · he
מכשיר כירורגי אולטרסוני מיניאטורי המבוסס על תצורת פלֶקסטנשן עם ערימת פיאזו-חשמל מוקדמת-מתיחה
כלים קטנים יותר עבור ניתוח עצם עדין יותר
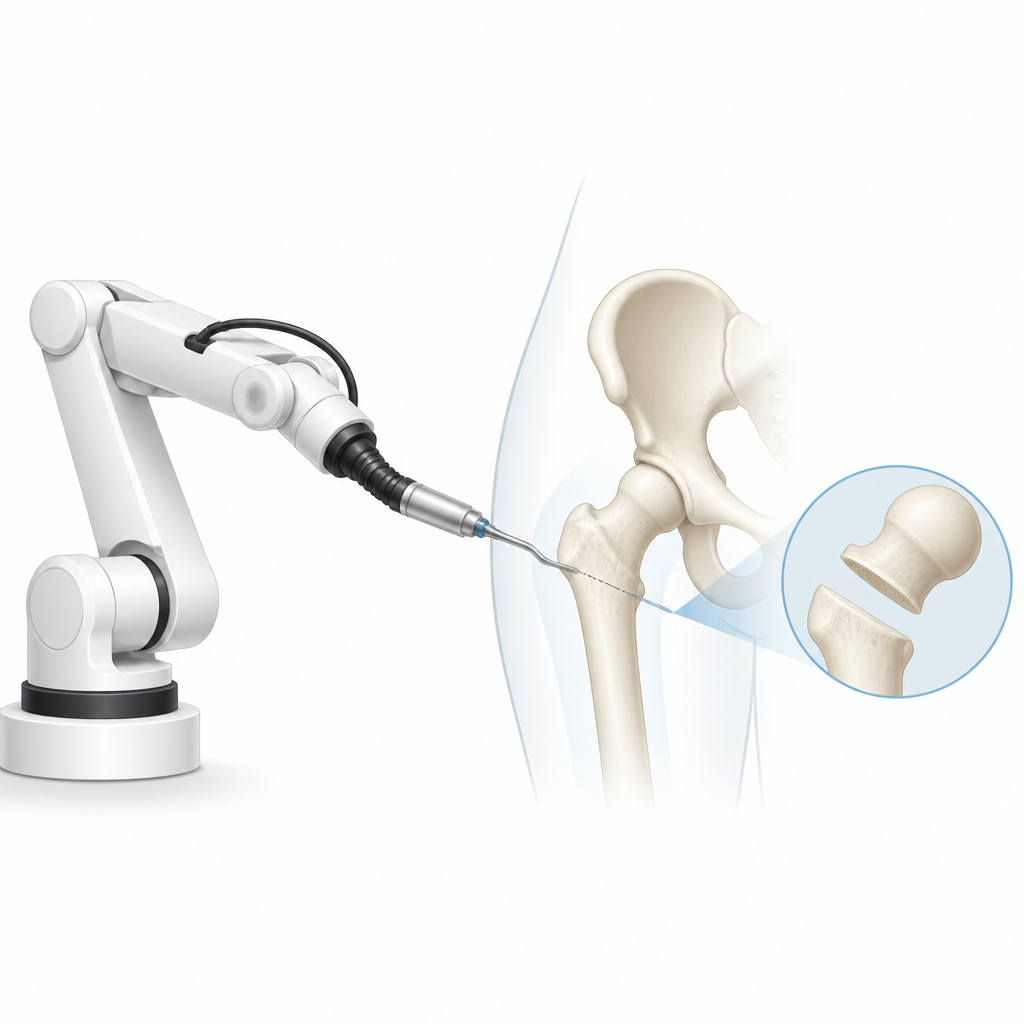
כאשר מנתחים חותכים עצם, הם מבקשים דיוק ושליטה תוך כדי פגיעה מינימלית ברקמות הסמוכות. סכיני עצם אולטרסוניים כבר מסייעים בכך שהם רוטטים במהירות גבוהה כך שהם חותכים בכוח נמוך ובדיוק גבוה, אך הגרסאות המסחריות כיום הן כלי יד מגושם. הן גדולות מדי ונוקשות מדי כדי לעבור דרך נקודות גישה צרות המשמשות בניתוח זעיר-פולשני או כדי להתאים לפרק כף-יד גמיש של רובוט ניתוחי. המחקר הזה מציג כלי חיתוך עצם אולטרסוני מיניאטורי שתוכנן לעבוד במרחבים צפופים ולהיות נשא על זרוע רובוטית, מה שפותח אפשרות לפרוצדורות עדינות ופחות פולשניות בעמוד השדרה ובגולגולת.
שיטה חדשה להקטנת להב אולטרסוני
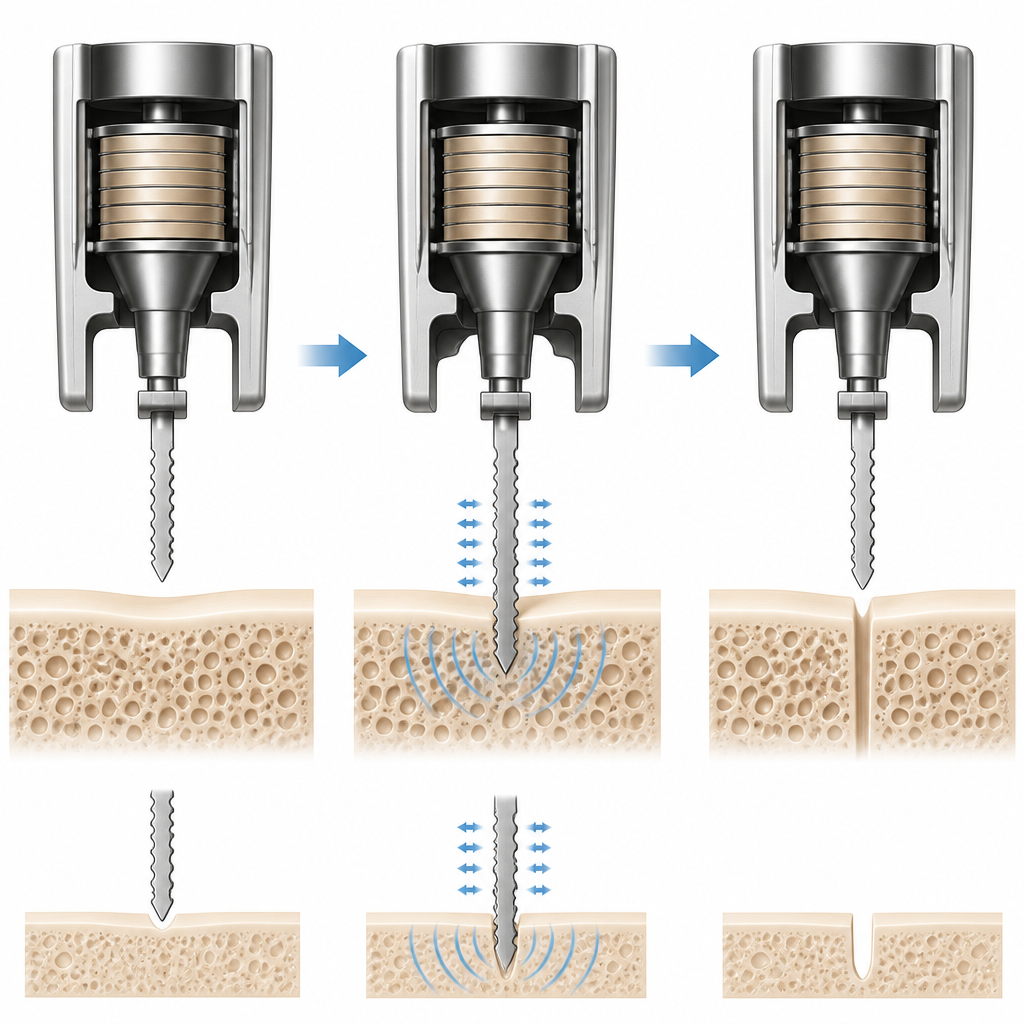
מכשירי עצם אולטרסוניים סטנדרטיים בנויים סביב ערימת טבעות קרמיות המתקבעת באמצעות ברגים, שצריכה להיות באורך מסוים כדי לרוטט ביעילות. אם פשוט מקטינים מבנה זה, דפוס הרטט משתנה, קצה הלהב זז פחות, והלהב הופך לחלש מדי לחיתוך עצם. עיצובים מיניאטוריים אחרים שהוצעו לא מצליחים להזיז את הלהב מספיק או נשענים על חיבורי דבק שמתפקעים תחת רטט חזק. החוקרים פתרו זאת על ידי חשיבה מחדש על הסידור. הם בנו מסגרת מתכת קומפקטית הנצמחת להתמוטט כקפיץ מצד אחד בעוד הצד השני נשאר יציב, והניעו אותה באמצעות ערימת טבעות קרמיות מכווצת היטב המוחזקת במקום על-ידי בורג ואומים. מסגרת ‘‘פלֶקסטנשן’’ זו פועלת כמגבר מכני: תנועות זעירות בערימת הקרמיקה מומרות לתנועות גדולות בהרבה בקצה החותך. כל המכשיר זעיר בגודלו כגודל אצבע וצר מספיק כדי לעבור דרך צינורות גישה כירורגיים שכיחים, תוך השארת מקום לחיבור לפרק כף-יד רובוטי.
לגרום ללהב קטן לזוז בעוצמה ובאמינות
בזכות צורתו הבלתי שגרתית, המכשיר החדש מתנהג באופן שונה מאוד מסכיני עצם אולטרסוניים מסורתיים בהספק. בדיקות חשמליות הראו שיש לו התנגדות גבוהה לזרם ואגירת אנרגיה חשמלית כמו קבל, מה שמקשה על ההנעה היעילה שלו. הצוות מדד בקפידה כיצד המבנה רוטט באמצעות דגמי מחשב ומדידות לייזר, ואישר שהצד העובד מתכופף בעוצמה בעוד צד החיבור וערימת הקרמיקה נותרו כמעט יציבים וישרים. לאחר מכן תכננו מעגל התאמה אלקטרוני עשוי סלילים וקבלים כדי לכוון איך ספק הכוח ‘‘רואה’’ את המכשיר, כך שיותר אנרגיה חשמלית תומר לתנועה בקצה הלהב. עם כוונון זה, הכלי המיניאטורי השיג נדנודי ויברציה של כ-40 עד 60 מיקרומטר בקצה הלהב, רמה הידועה מעבודה קודמת כהספיקה לחיתוך עצם.
בדיקת חיתוך עצם בכוח נמוך ובשליטה גבוהה
כדי לבדוק עד כמה המכשיר חותך, החוקרים הרכיבו אותו על ערכת בדיקה מעבדתית והשתמשו בו כדי לנסר מקטעי צלע חזיר, המזכירים במבנה שלהם עצם אנושית. על-ידי שינוי מהירות הכנסת הלהב אל העצם ומשרעת הוויברציה, הם מדדו גם את כוח החיתוך הצדדי וגם את כוח החדירה האנכי. כשהלהב רוטט בעוצמה ומתקדם לאט, הכוחות נשארו מתחת לניוטון אחד, הרבה פחות מהחיתוך לא-אולטרסוני, והקריאות החשמליות נשמרו יציבות. במהירויות קידום גבוהות יותר המכשיר הפך לקשה יותר לשליטה, עם סימנים שהרטט סטה מקצב אידיאלי. תמונות של החיתוכים אישרו שההגדרות הטובות ייצרו חריצים עמוקים ונקיים בעוד הגדרות פחות טובות הובילו לתוצאות פחות עקביות. ניסויים אלה גם הראו שצפוי הצטברות חום במקום החיתוך, מה שמדגיש את הצורך העתידי בקירור, כפי שקיים במערכות מסחריות.
הבאת הכלי על רובוט ניתוחי
בהמשך הוצמד המכשיר המיניאטורי לזרוע רובוטית מדויקת של Kuka דרך פלטפורמת מיקום עדינה וחיישן כוח. בערכה זו, הרובוט הנחה את הכלי בביטים קצרים חוזרים של משיכת הלהב על פני העצם תוך העלאת העומק בהדרגה, בדומה לאופן שבו מנתח עשוי להאריך חיתוך. בתנאים אלה כוח החיתוך, הכוח הצדי והכוח האנכי נשארו מתחת לניוטון אחד גם כשהלהב חתר לעומק והתקדם במהירות גבוהה יותר. חופש התנועה הנוסף של הרובוט להתאים מיקום סייע לשמור על רווח מעט רחב יותר מהלהב עצמה, מה שהקטין את החיכוך. בדיקה מיקרוסקופית של החתכים המתקבלים הראתה קירות חדים, שבירה מינימלית ורוחבים הנמצאים בטווח של כ-שישה אחוזים מעובי הלהב, דבר המעיד על דיוק מצוין. הטמפרטורות בקצה החיתוך עלו עם המהירות אך נותרו ברמה סבירה עבור בדיקות חוץ-גופיות אלו.
מה זה עשוי להציב עבור ניתוחים עתידיים
עבודה זו ממחישה שמכשיר חיתוך עצם אולטרסוני בגודל אגודל יכול לייצר את התנועה והעוצמה הנדרשות לניתוח תוך שהוא נשאר קטן מספיק כדי לרכוב על פרק כף-יד רובוטי גמיש. על-ידי שילוב מסגרת מכנית חכמה, אלקטרוניקה מותאמת לשמירה על כיוון הוויברציה ושליטה מדוקדקת על מהירות ועומק החיתוך, החוקרים השיגו חיתוכים נקיים וצריכים בעצם תוך שימוש בכוחות נמוכים מאוד. עם הוספת קירור וכיול נוסף של צורת הלהב ושליטת הרובוט, כלים דומים עשויים בעתיד לסייע למנתחים להסיר עצם באזורים צפופים בעמוד השדרה או בגולגולת דרך פתחים זעירים, ולהפחית טראומה ולשפר גישה ללא ויתור על דיוק.
ציטוט: Li, X., Jones, D., Valdastri, P. et al. A miniature ultrasonic surgical device based on a flextensional configuration with a pre-stressed piezoelectric stack. Commun Eng 5, 95 (2026). https://doi.org/10.1038/s44172-026-00651-2
מילות מפתח: ניתוח עצם אולטרסוני, ניתוח רובוטי, חדירות מינימלית, מכשירי ניתוח, חיתוך עצם