Clear Sky Science · ja
予応力をかけた圧電スタックを用いたフレクステンショナル構成に基づく小型超音波外科デバイス
より小さな器具でより穏やかな骨手術を
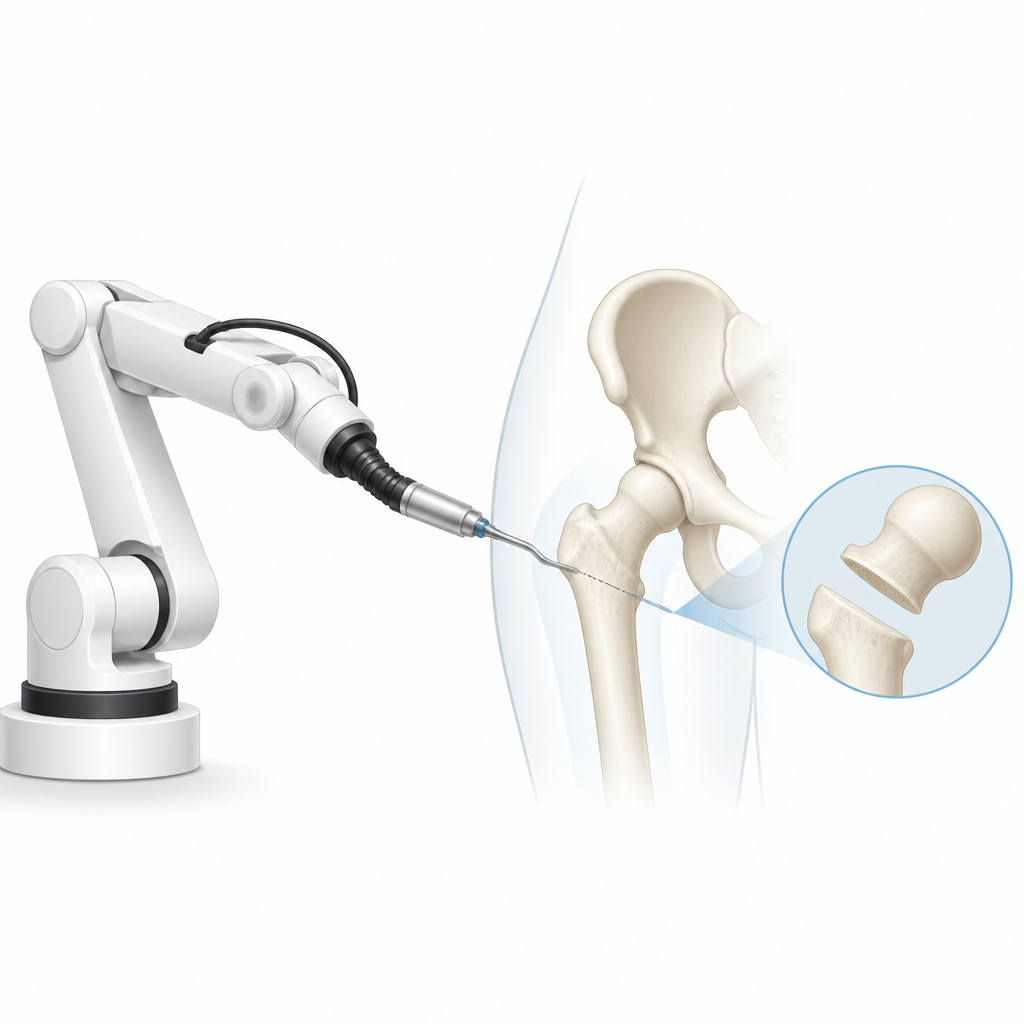
外科医が骨を切るときには、精度と制御を保ちつつ周囲の組織への損傷を最小限にしたい。超音波骨メスは高速で振動して低い力で高精度に切ることで役立っているが、現在市販されているものは大型の手持ち工具である。これらはキーホール手術で用いる狭い挿入経路を通すには大型すぎ、手術用ロボットの柔軟な関節に取り付けるには剛性が高すぎる。本研究は、狭い空間内で動作しロボットアームで運ぶことができる小型の超音波骨切削ツールを紹介し、脊椎や頭蓋のより繊細で低侵襲な手術への道を開く可能性を示す。
超音波ブレードを小型化する新しい方法
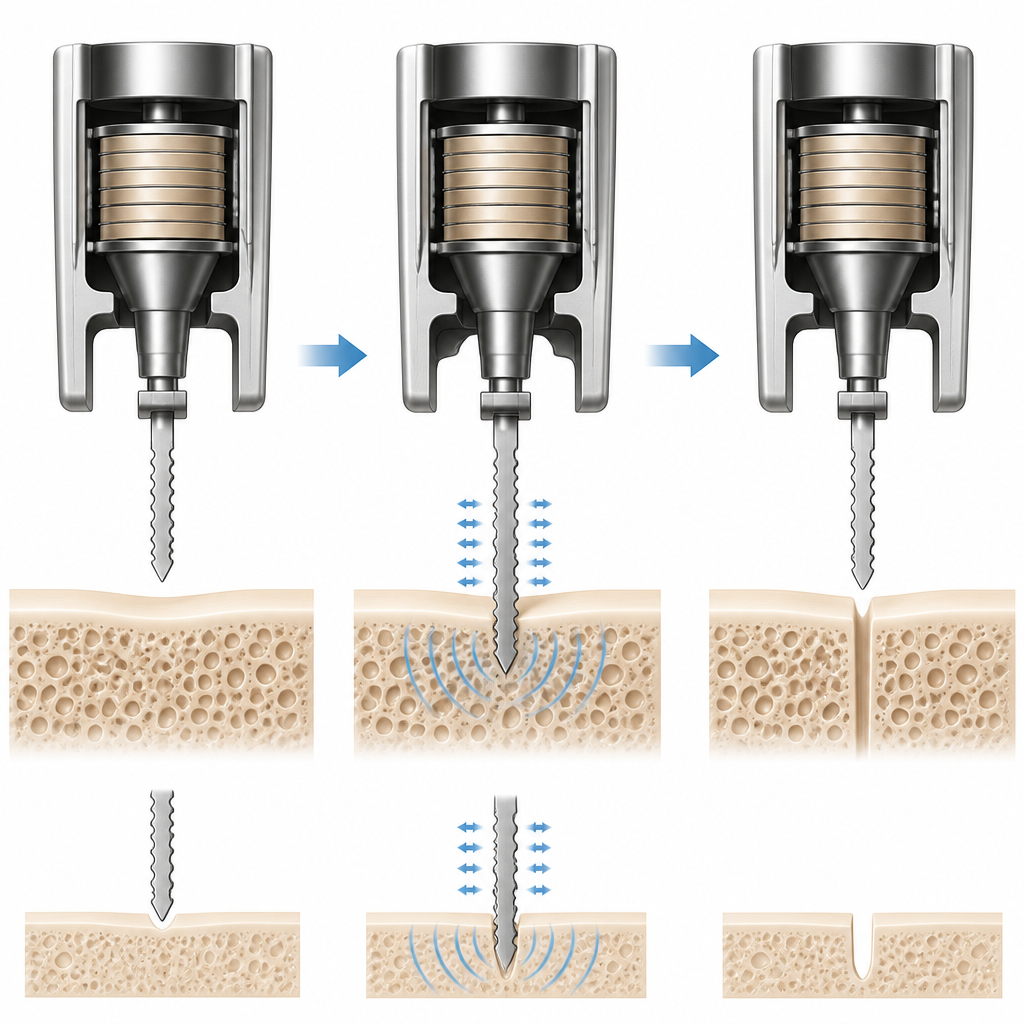
標準的な超音波骨デバイスは、効率良く振動させるために一定の長さを必要とするセラミックリングをボルトで締結したスタックを中心に構成されている。この構造を単に縮小すると振動モードが変わり、先端の動きが小さくなって骨を切る力が不足する。提案されてきた他の小型設計は、ブレードの十分な移動を得られなかったり、強い振動で剥がれる接着ジョイントに頼ったりしている。研究者らはレイアウトを再考することでこれを解決した。片側がバネのようにたわみ、もう一方がほとんど動かないように設計したコンパクトな金属フレームを作り、ネジとナットで締め付けたセラミックリングの圧縮スタックで駆動した。この「フレクステンショナル」フレームは機械的な増幅器として働き、セラミックスタックのごく小さな動きを切削ブレード側で大きな動きに変換する。装置全体は指先ほどの大きさで、一般的な手術用アクセスチューブを通過できる十分な細さでありながら、ロボットの関節への接続スペースも確保している。
小さなブレードを強力かつ信頼性高く動かす
その異例の形状のため、新しいデバイスは従来の超音波メスとは電気的・機械的挙動が大きく異なる。電気試験では、電流に対する抵抗が高く、コンデンサのように電気エネルギーを蓄えるため効率的に駆動しにくいことが示された。研究チームはコンピュータモデルとレーザー測定を用いて構造の振動を詳細に測定し、作動側が強くたわむ一方で接続側とセラミックスタックはほとんど動かず直線を保っていることを確認した。そこでコイルやコンデンサからなる整合回路を設計し、電源がデバイスをどう“見る”かを調整して、より多くの電気エネルギーがブレードの運動に変換されるようにした。このチューニングにより、小型ツールはブレード先端で約40〜60マイクロメートルの振幅を達成し、これは先行研究で骨を切るのに十分とされるレベルである。
低力かつ高制御での骨切削試験
デバイスの切削性能を評価するため、研究者らはまず実験用試験装置に取り付けて豚の肋骨断片を横切って切断した。豚骨はヒトの骨に類似している。ブレードの押し込み速度と振幅を変えながら、横方向の切削力と下方向の貫通力を測定した。ブレードが強く振動しゆっくり進めた場合、力は1ニュートン未満にとどまり、非超音波切削に比べてはるかに小さく、電気的測定値も安定していた。進める速度を上げると制御が難しくなり、振動が理想のリズムからずれる兆候が見られた。切断面の画像は、最適条件では深くきれいな溝が得られる一方、条件が悪いと結果が一貫しないことを示した。これらの試験はまた、切削部で熱が蓄積することを示しており、市販システムと同様の冷却の必要性が将来的にあることを強調している。
手術用ロボットへの搭載
次に、小型デバイスを高精度なKukaロボットアームに微位置決めプラットフォームと力センサーを介して取り付けた。このセットアップでロボットは工具を繰り返し短いストロークで骨にかけ、深さを徐々に増していった。これは外科医が切開を延長する際の動作に似ている。この条件下で、切削力、横力、垂直力はいずれもブレードが深く速く動いている間も1ニュートン以下に保たれた。ロボットが位置を微調整できることで、ブレード自体よりわずかに広い隙間が保たれ摩擦が減少した。切断面の顕微鏡観察では、鋭い壁面、最小限の欠け、ブレード厚さの約6%以内の幅で仕上がっており、非常に高い精度を示した。切削先端の温度は速度とともに上昇したが、このin vitro試験では管理可能な範囲にとどまった。
今後の手術に与える可能性
本研究は、親指大の超音波骨切削デバイスが、柔軟なロボット関節に搭載できるほど小さくありながら手術に必要な動きと力を生み出せることを示している。賢い機械フレーム、振動を維持するための最適化された電子回路、切削速度と深さの細かな制御を組み合わせることで、研究者らは非常に低い力で骨に対してきれいで狭い切り込みを実現した。冷却機構の追加やブレード形状とロボット制御のさらなる調整が行われれば、将来的に類似のツールが脊椎や頭蓋の狭い領域で小さな開口から骨を除去する際に、外科的外傷を減らし精度を損なうことなくアクセスを改善するのに役立つ可能性がある。
引用: Li, X., Jones, D., Valdastri, P. et al. A miniature ultrasonic surgical device based on a flextensional configuration with a pre-stressed piezoelectric stack. Commun Eng 5, 95 (2026). https://doi.org/10.1038/s44172-026-00651-2
キーワード: 超音波骨外科, ロボット手術, 低侵襲, 外科機器, 骨切削