Clear Sky Science · ru
Миниатюрный ультразвуковой хирургический прибор на основе флекстональной схемы с преднапряжённым пьезоэлектрическим стеком
Меньше инструмент — деликатнее операция на кости
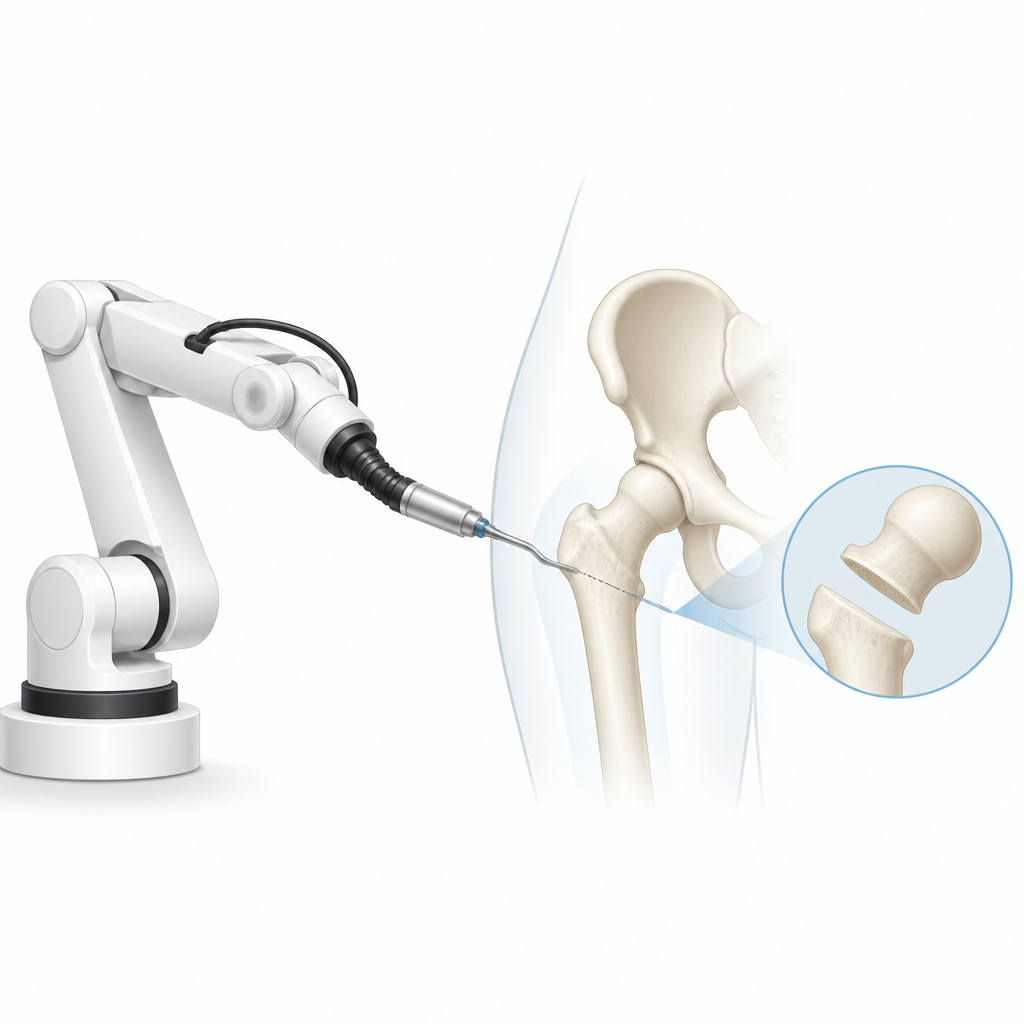
При рассечении кости хирурги стремятся к точности и контролю, минимально затрагивая окружающие ткани. Ультразвуковые костные скальпели уже помогают за счёт высокочастотных колебаний, обеспечивающих малые силы резания и высокую точность, но существующие коммерческие образцы представляют собой громоздкие ручные инструменты. Они слишком велики и жёстки, чтобы проходить через узкие точки доступа при малоинвазивных операциях или крепиться на гибком запястье хирургических роботов. В этом исследовании представлен миниатюрный ультразвуковой инструмент для резки кости, спроектированный для работы в ограниченных пространствах и для установки на роботизированную руку, что открывает перспективы более тонких и менее инвазивных вмешательств в области позвоночника и черепа.
Новый способ уменьшить ультразвуковое лезвие
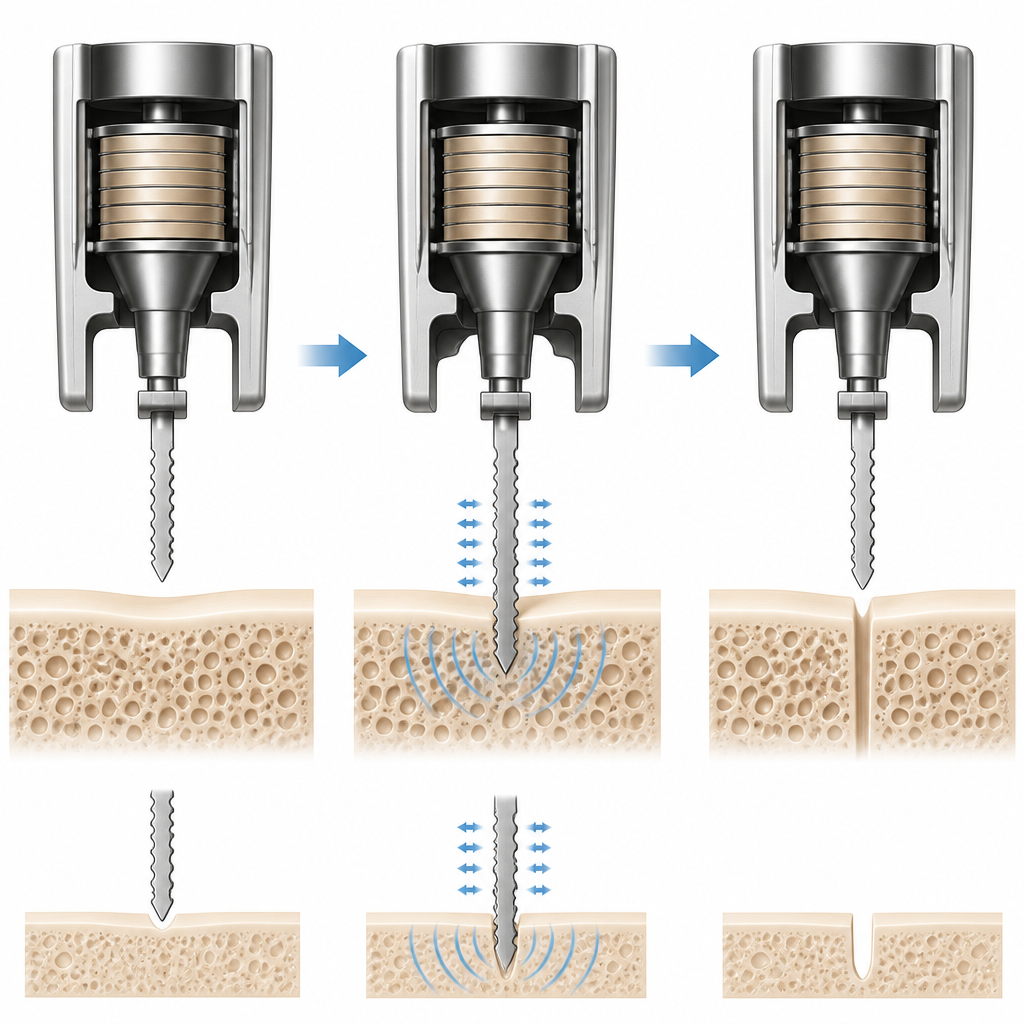
Стандартные ультразвуковые костные приборы строятся вокруг болтового стека керамических колец, который должен иметь определённую длину для эффективной вибрации. Простое уменьшение этого стека меняет форму колебаний, снижает амплитуду на конце и делает лезвие слишком слабым для резки кости. Другие предложенные миниатюрные конструкции либо не могут обеспечить достаточно большого хода лезвия, либо полагаются на клеевые соединения, разрушающиеся при сильной вибрации. Авторы решили эту задачу, переосмыслив компоновку. Они создали компактную металлическую раму, рассчитанную так, чтобы с одной стороны изгибаться как пружина, а с другой оставаться неподвижной, и привели её в движение плотным стеком керамических колец, зажатых винтом и гайками. Такая флекстональная рама действует как механический усилитель: крошечные движения керамического стека преобразуются в значительно большие перемещения у режущего лезвия. Устройство имеет примерно размер пальца и достаточно узкое, чтобы проходить через распространённые хирургические каналы, при этом остаётся место для подключения к роботу-«запястью».
Как заставить крошечное лезвие двигаться мощно и надёжно
Благодаря нетипичной форме новое устройство ведёт себя иначе, чем традиционные ультразвуковые скальпели при подаче питания. Электрические измерения показали, что оно имеет высокое сопротивление току и аккумулирует энергию как конденсатор, что затрудняет его эффективный привод. Команда тщательно изучила поведение колебаний с помощью компьютерных моделей и лазерных измерений, подтвердив, что рабочая сторона сильно изгибается, тогда как сторона крепления и керамический стек остаются почти неподвижными и прямыми. Затем они разработали согласующую электронную цепь из катушек и конденсаторов, чтобы подстроить «восприятие» устройства источником питания и увеличить долю электрической энергии, превращающуюся в механическое движение на лезвии. После этой подстройки миниатюрный инструмент достиг колебаний около 40–60 микрометров на кончике лезвия — уровня, который по предыдущим исследованиям достаточен для резки кости.
Испытания реза: низкие силы и высокий контроль
Чтобы оценить режущие возможности, исследователи сначала смонтировали прибор на лабораторной испытательной установке и использовали его для распиливания сегментов свиной ребра, близких по свойствам к человеческой кости. Меняя скорость продвижения лезвия в кость и амплитуду его вибрации, они измеряли боковую силу резания и вертикальную силу проникновения. При сильной вибрации и медленном продвижении силы оставались ниже одного ньютона, значительно меньше, чем при неультразвуковой резке, а электрические показатели были стабильны. При более высоких скоростях продвижения устройство сложнее контролировать — появлялись признаки сдвига резонанса от оптимального режима. Снимки разрезов показали, что лучшие настройки давали глубокие чистые щели, тогда как худшие параметры приводили к менее однородным результатам. Испытания также показали накопление тепла в зоне реза, что подчёркивает необходимость охлаждения в будущих системах, как в коммерческих приборах.
Интеграция инструмента с хирургическим роботом
Далее миниатюрное устройство прикрепили к высокоточной роботизированной руке Kuka через платформу тонкого позиционирования и датчик силы. В этой конфигурации робот направлял инструмент по повторным коротким ходам через кость, постепенно увеличивая глубину, аналогично тому, как хирург удлиняет разрез. В этих условиях силы резания, боковые и вертикальные силы оставались ниже одного ньютона даже при увеличении глубины и скорости реза. Дополнительная свобода роботизированной системы по корректировке положения помогала поддерживать немного более широкий зазор, чем само лезвие, что снижало трение. Микроскопическая оценка полученных разрезов показала острые стенки, минимальное раскалывание и ширины, совпадающие примерно с толщиной лезвия с погрешностью около шести процентов, что указывает на высокую точность. Температуры на кончике резца росли с увеличением скорости, но оставались управляемыми в условиях in vitro.
Что это может значить для будущих операций
Работа демонстрирует, что ультразвуковой инструмент для резки кости размером с большой палец может генерировать необходимое движение и силу для хирургии, оставаясь при этом достаточно маленьким, чтобы устанавливаться на гибком роботизированном запястье. Комбинируя продуманную механическую раму, адаптированную электронику для поддержания резонанса и тщательное управление скоростью и глубиной реза, исследователи получили чистые узкие разрезы в кости при очень низких усилиях. С добавлением системы охлаждения и дальнейшей оптимизацией формы лезвия и управления роботом такие инструменты могут однажды помочь хирургам удалять кость в плотнозанятых областях позвоночника или черепа через маленькие отверстия, снижая травму и улучшая доступ без потери точности.
Цитирование: Li, X., Jones, D., Valdastri, P. et al. A miniature ultrasonic surgical device based on a flextensional configuration with a pre-stressed piezoelectric stack. Commun Eng 5, 95 (2026). https://doi.org/10.1038/s44172-026-00651-2
Ключевые слова: ультразвуковая костная хирургия, роботизированная хирургия, минимально инвазивная, хирургические приборы, резка кости