Clear Sky Science · it
Un piccolo dispositivo chirurgico a ultrasuoni basato su una configurazione flettensionale con stack piezoelettrico pre-tensionato
Strumenti più piccoli per una chirurgia ossea più delicata
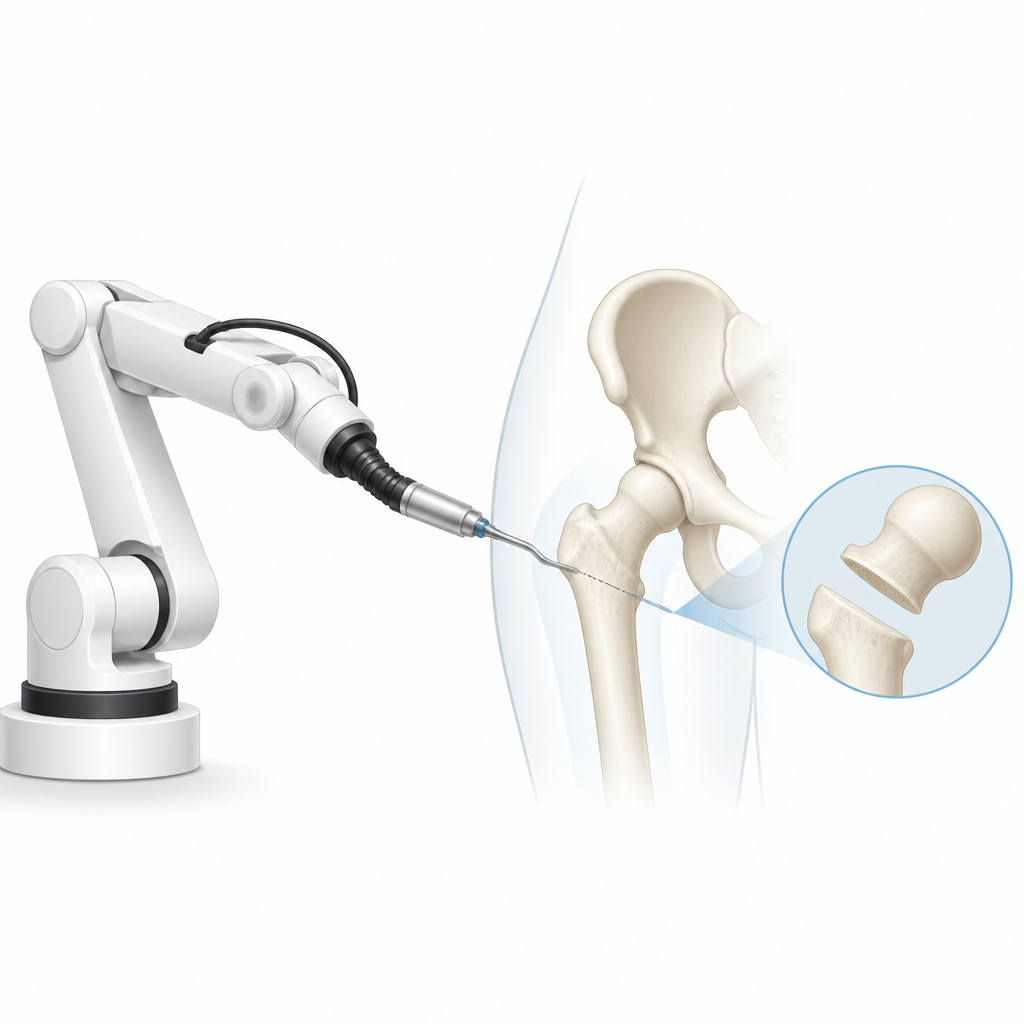
Quando i chirurghi tagliano l'osso cercano precisione e controllo disturbando il meno possibile i tessuti circostanti. Le seghette ossee a ultrasuoni aiutano già oggi grazie alle vibrazioni ad alta frequenza che consentono di incidere con bassa forza e grande precisione, ma le versioni commerciali attuali sono strumenti manuali ingombranti. Sono troppo grandi e rigide per passare attraverso i piccoli accessi usati nella chirurgia endoscopica o per montarsi sul polso flessibile dei robot chirurgici. Questo studio presenta un mini utensile a ultrasuoni per il taglio dell'osso progettato per operare in spazi ristretti e per essere portato da un braccio robotico, aprendo la strada a interventi più delicati e meno invasivi su colonna vertebrale e cranio.
Un nuovo modo per rimpicciolire una lama ultrasonica
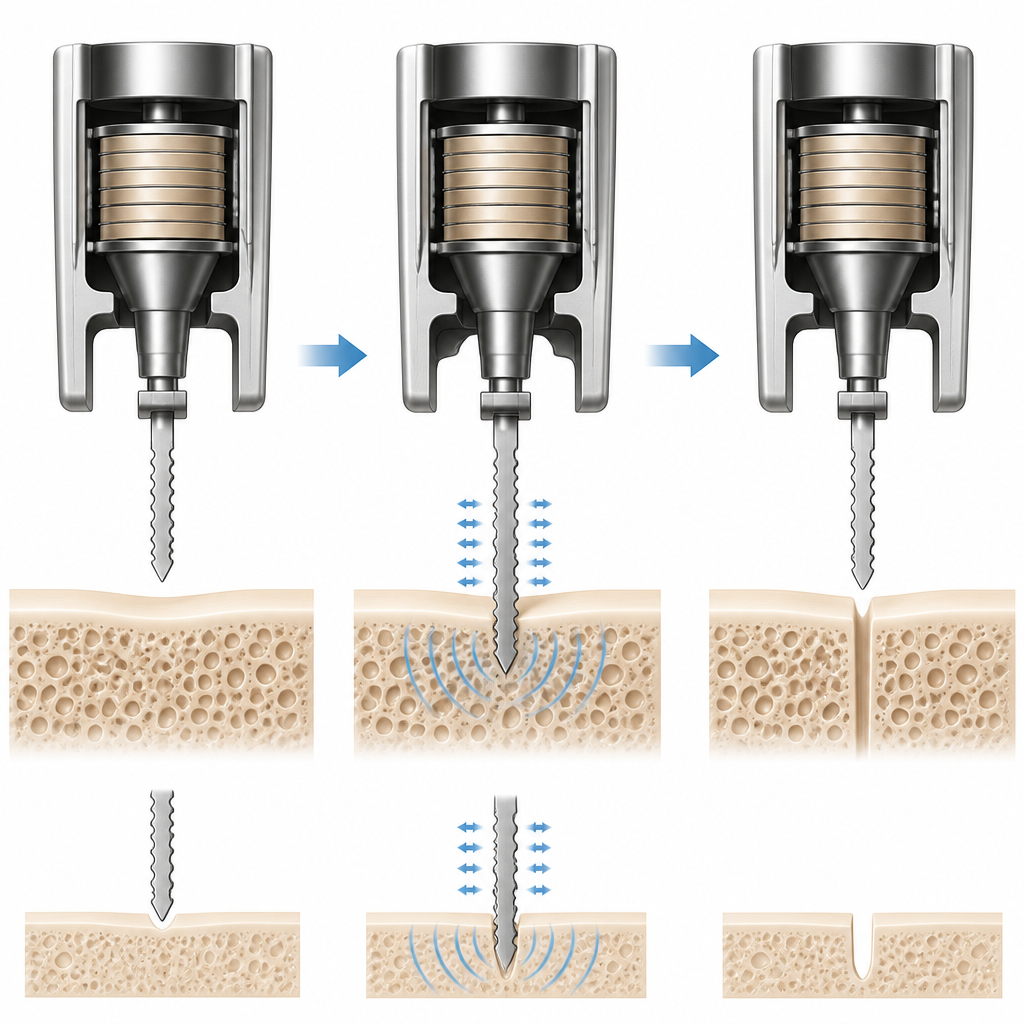
I dispositivi ultrasonici standard si basano su uno stack avvitato di anelli ceramici che deve avere una certa lunghezza per vibrare in modo efficiente. Se si riduce semplicemente questa struttura, il modello di vibrazione cambia, la punta si muove di meno e la lama diventa troppo debole per tagliare l'osso. Altri progetti miniaturizzati proposti o non riescono a muovere la lama a sufficienza o si affidano a giunzioni incollate che cedono sotto forti vibrazioni. I ricercatori hanno risolto il problema ripensando la disposizione. Hanno costruito una struttura metallica compatta sagomata per flettersi come una molla da un lato mantenendo ferme le altre parti, e l'hanno azionata con uno stack di anelli ceramici fortemente compresso e tenuto in posizione da una vite e dadi. Questa cornice «flettensionale» agisce da amplificatore meccanico: movimenti minimi nello stack ceramico vengono trasformati in movimenti molto più grandi alla lama da taglio. L'intero dispositivo è grande più o meno come un dito e abbastanza stretto da passare attraverso i tubi di accesso chirurgici comuni, lasciando al contempo spazio per il collegamento a un polso robotico.
Far muovere una mini lama con potenza e affidabilità
Per via della sua forma insolita, il nuovo dispositivo si comporta molto diversamente rispetto agli scalpelli ultrasonici tradizionali quando è alimentato. I test elettrici hanno mostrato che presenta una grande resistenza alla corrente e immagazzina energia elettrica come un condensatore, il che lo rende più difficile da pilotare in modo efficiente. Il team ha misurato con cura come la struttura vibra usando modelli al computer e misure laser, confermando che il lato operativo si flette fortemente mentre il lato di connessione e lo stack ceramico restano quasi fermi e diritti. Hanno poi progettato un circuito di adattamento elettronico fatto di bobine e condensatori per sintonizzare come l'alimentazione «vede» il dispositivo, in modo che più energia elettrica venga convertita in movimento sulla lama. Con questa taratura, il mini utensile ha raggiunto escursioni di vibrazione attorno a 40–60 micrometri sulla punta della lama, un livello noto da lavori precedenti come sufficiente per tagliare l'osso.
Testare il taglio dell'osso con bassa forza e alto controllo
Per valutare le capacità di taglio, i ricercatori hanno prima montato il dispositivo su un banco di prova di laboratorio e lo hanno usato per segare sezioni di costola suina, che somigliano molto all'osso umano. Variando la velocità di avanzamento della lama nell'osso e l'ampiezza della sua vibrazione, hanno misurato sia la forza di taglio laterale sia la forza di penetrazione verticale. Quando la lama vibrava intensamente e avanzava lentamente, le forze rimasero sotto un newton, molto inferiori rispetto al taglio non ultrasonico, e le letture elettriche restarono stabili. A velocità di avanzamento più elevate il dispositivo divenne più difficile da controllare, con segnali di deriva della vibrazione rispetto al ritmo ideale. Le immagini dei tagli confermarono che le impostazioni migliori produssero gap profondi e puliti mentre impostazioni peggiori portavano a risultati meno consistenti. Questi test hanno anche mostrato che si può accumulare calore nella zona di taglio, sottolineando la necessità futura di raffreddamento, come nei sistemi commerciali.
Portare lo strumento su un robot chirurgico
Successivamente il mini dispositivo è stato fissato a un braccio robotico Kuka ad alta precisione tramite una piattaforma di microposizionamento e un sensore di forza. In questa configurazione il robot ha guidato lo strumento attraverso ripetute passate brevi sull'osso aumentando lentamente la profondità, in modo simile a come un chirurgo potrebbe estendere un'incisione. In queste condizioni le forze di taglio, laterali e verticali rimasero tutte sotto un newton anche quando la lama penetrava più in profondità e si muoveva più velocemente. La libertà aggiuntiva del robot di regolare la posizione aiutò a mantenere una fessura leggermente più ampia rispetto alla sola lama, riducendo l'attrito. L'ispezione microscopica dei tagli risultanti ha mostrato pareti nette, scheggiature minime e larghezze entro circa il sei percento dello spessore della lama, indicando un'eccellente precisione. Le temperature alla punta di taglio aumentavano con la velocità ma rimasero gestibili per questo test in vitro.
Cosa potrebbe significare per gli interventi futuri
Questo lavoro dimostra che un dispositivo ultrasonico per il taglio dell'osso delle dimensioni di un pollice può generare il movimento e la forza necessari per la chirurgia restando sufficientemente piccolo da essere montato su un polso robotico flessibile. Combinando una struttura meccanica intelligente, elettronica su misura per mantenere la vibrazione sintonizzata e un controllo attento di velocità e profondità di taglio, i ricercatori hanno ottenuto incisioni pulite e strette nell'osso usando forze molto basse. Con l'aggiunta del raffreddamento e un'ulteriore ottimizzazione della forma della lama e del controllo robotico, strumenti simili potrebbero un giorno aiutare i chirurghi a rimuovere osso in aree affollate della colonna o del cranio attraverso piccole aperture, riducendo il trauma e migliorando l'accesso senza sacrificare la precisione.
Citazione: Li, X., Jones, D., Valdastri, P. et al. A miniature ultrasonic surgical device based on a flextensional configuration with a pre-stressed piezoelectric stack. Commun Eng 5, 95 (2026). https://doi.org/10.1038/s44172-026-00651-2
Parole chiave: chirurgia ossea a ultrasuoni, chirurgia robotica, minimamente invasiva, dispositivi chirurgici, taglio dell'osso