Clear Sky Science · en
A miniature ultrasonic surgical device based on a flextensional configuration with a pre-stressed piezoelectric stack
Smaller tools for gentler bone surgery
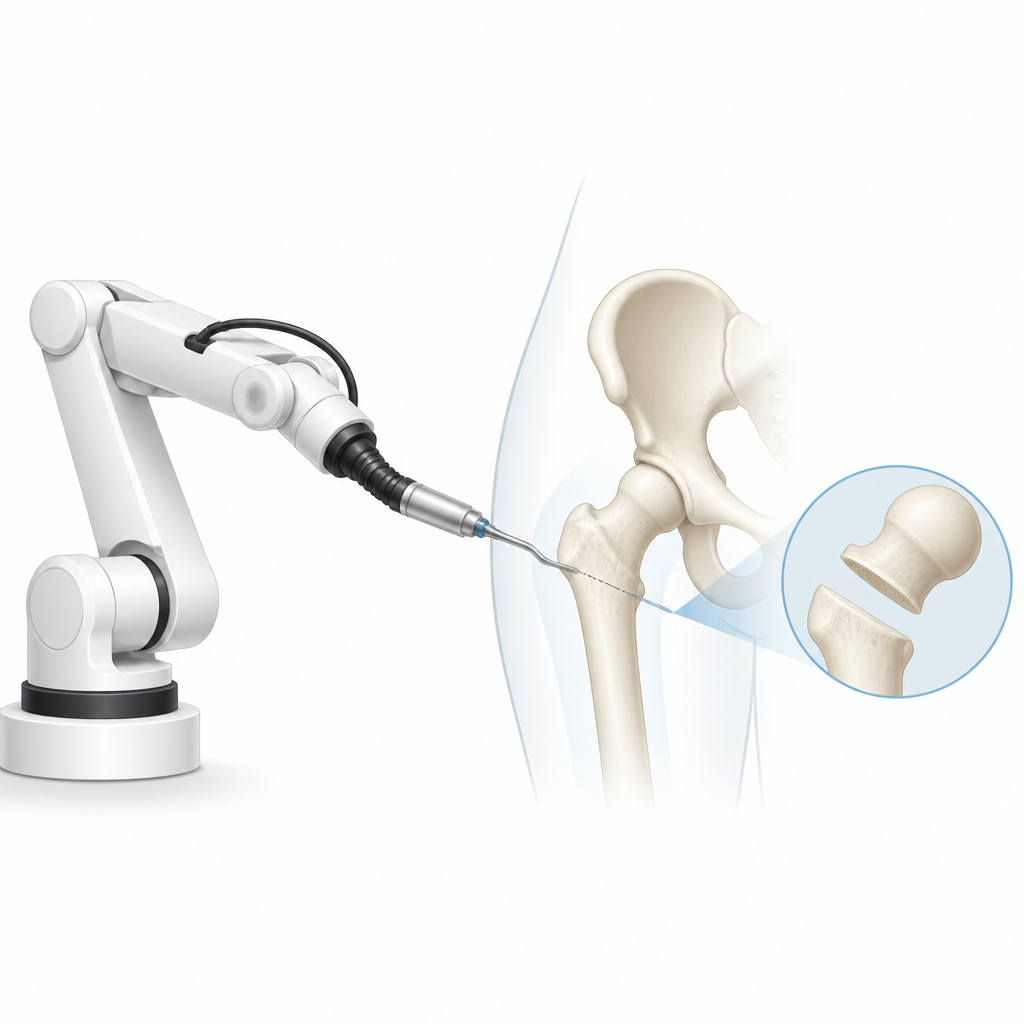
When surgeons cut bone, they want accuracy and control while disturbing as little nearby tissue as possible. Ultrasonic bone scalpels already help by vibrating so quickly that they slice with low force and high precision, but today’s commercial versions are bulky hand tools. They are too large and too rigid to pass through the narrow entry points used in keyhole surgery or to fit on the flexible wrist of surgical robots. This study introduces a miniature ultrasonic bone-cutting tool designed to work inside tight spaces and to be carried by a robotic arm, opening the door to more delicate, less invasive operations on the spine and skull.
A new way to shrink an ultrasonic blade
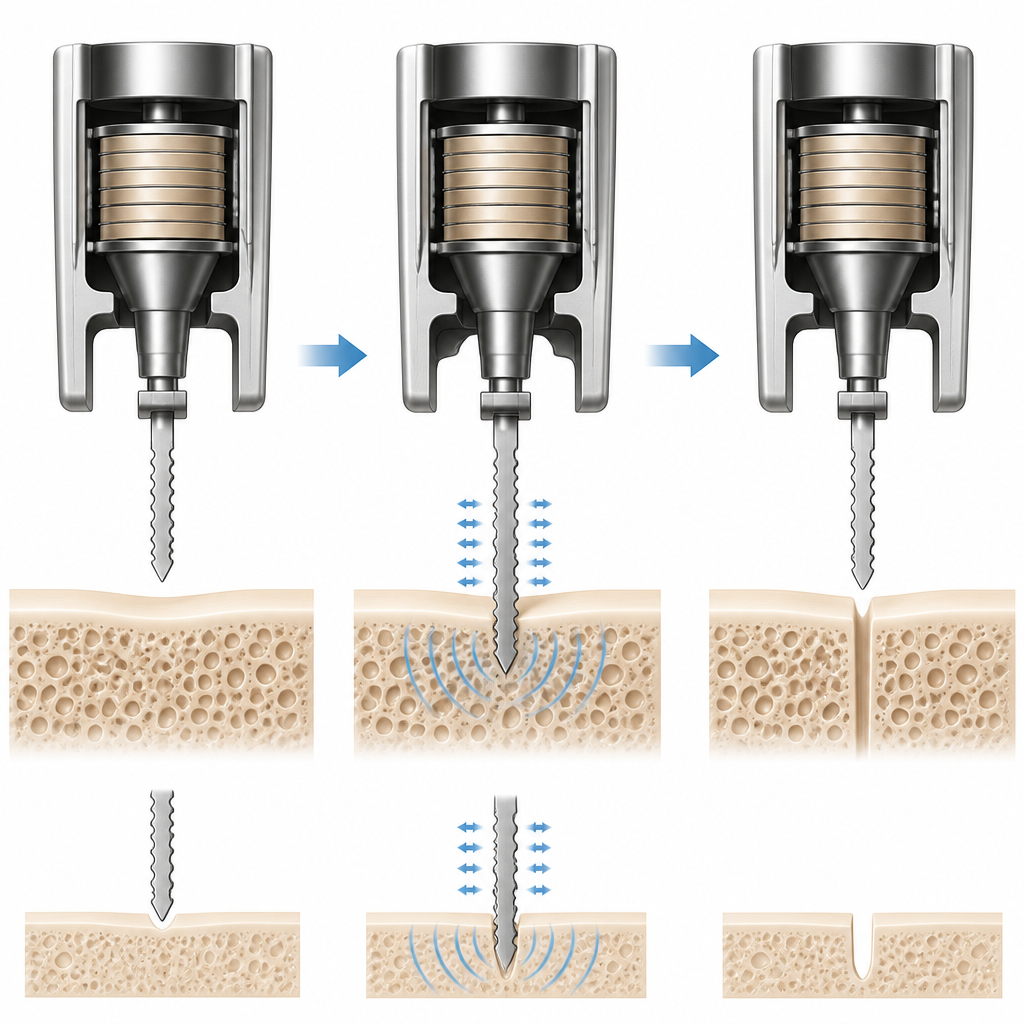
Standard ultrasonic bone devices are built around a bolted stack of ceramic rings that must be a certain length to vibrate efficiently. If you simply shrink this structure, the vibration pattern changes, the tip moves less, and the blade becomes too weak to cut bone. Other proposed miniature designs either cannot move the blade far enough or rely on glue joints that fail under strong vibration. The researchers solved this by rethinking the layout. They built a compact metal frame shaped to flex like a spring on one side while staying still on the other, and they drove it with a tightly squeezed stack of ceramic rings held in place by a screw and nuts. This “flextensional” frame acts as a mechanical amplifier: tiny motions in the ceramic stack are turned into much larger motions at the cutting blade. The entire device is only about the size of a finger and narrow enough to pass through common surgical access tubes, while leaving space to connect to a robotic wrist.
Making a tiny blade move powerfully and reliably
Because of its unusual shape, the new device behaves very differently from traditional ultrasonic scalpels when powered. Electrical tests showed that it has a high resistance to current and stores electrical energy like a capacitor, which makes it harder to drive efficiently. The team carefully measured how the structure vibrates using computer models and laser measurements, confirming that the working side flexes strongly while the connection side and the ceramic stack remain almost still and straight. They then designed an electronic matching circuit made of coils and capacitors to tune how the power supply “sees” the device, so that more electrical energy is converted into motion at the blade. With this tuning in place, the miniature tool achieved vibration swings of around 40 to 60 micrometers at the blade tip, a level known from earlier work to be sufficient for cutting bone.
Testing bone cutting with low force and high control
To find out how well the device cuts, the researchers first mounted it on a laboratory test rig and used it to saw through sections of pig rib, which closely resemble human bone. By varying how fast the blade was pushed into the bone, and how far it vibrated, they measured both sideways cutting force and downward penetration force. When the blade vibrated strongly and advanced slowly, the forces stayed under one newton, far lower than in non-ultrasonic cutting, and the electrical readings remained stable. At higher advance speeds the device became harder to control, with signs that its vibration drifted away from the ideal rhythm. Images of the cuts confirmed that the best settings produced deep, clean gaps while poorer settings led to less consistent results. These tests also showed that heat can build up at the cut, underscoring the future need for cooling, as in commercial systems.
Bringing the tool onto a surgical robot
Next, the miniature device was attached to a high-precision Kuka robotic arm through a fine-positioning platform and a force sensor. In this set-up, the robot guided the tool through repeated short strokes across the bone while slowly increasing depth, similar to how a surgeon might extend a cut. Under these conditions the cutting, side, and vertical forces all stayed below one newton even as the blade cut deeper and moved faster. The robot’s extra freedom to adjust position helped maintain a slightly wider gap than the blade itself, which reduced friction. Microscopic inspection of the resulting cuts showed sharp walls, minimal chipping, and widths within about six percent of the blade thickness, indicating excellent precision. Temperatures at the cutting tip rose with speed but remained manageable for this in vitro testing.
What this could mean for future operations
This work demonstrates that a thumb-sized ultrasonic bone-cutting device can generate the motion and strength needed for surgery while staying small enough to ride on a flexible robotic wrist. By combining a smart mechanical frame, tailored electronics to keep the vibration tuned, and careful control of cutting speed and depth, the researchers achieved clean, narrow cuts in bone using very low forces. With added cooling and further tuning of blade shape and robot control, similar tools could one day help surgeons remove bone in crowded areas of the spine or skull through tiny openings, reducing trauma and improving access without sacrificing precision.
Citation: Li, X., Jones, D., Valdastri, P. et al. A miniature ultrasonic surgical device based on a flextensional configuration with a pre-stressed piezoelectric stack. Commun Eng 5, 95 (2026). https://doi.org/10.1038/s44172-026-00651-2
Keywords: ultrasonic bone surgery, robotic surgery, minimally invasive, surgical devices, bone cutting