Clear Sky Science · nl
Een miniatuur ultrasoon chirurgisch instrument gebaseerd op een flextension-configuratie met een voorbelaste piezo-elektrische stapel
Kleinere instrumenten voor zachtere botchirurgie
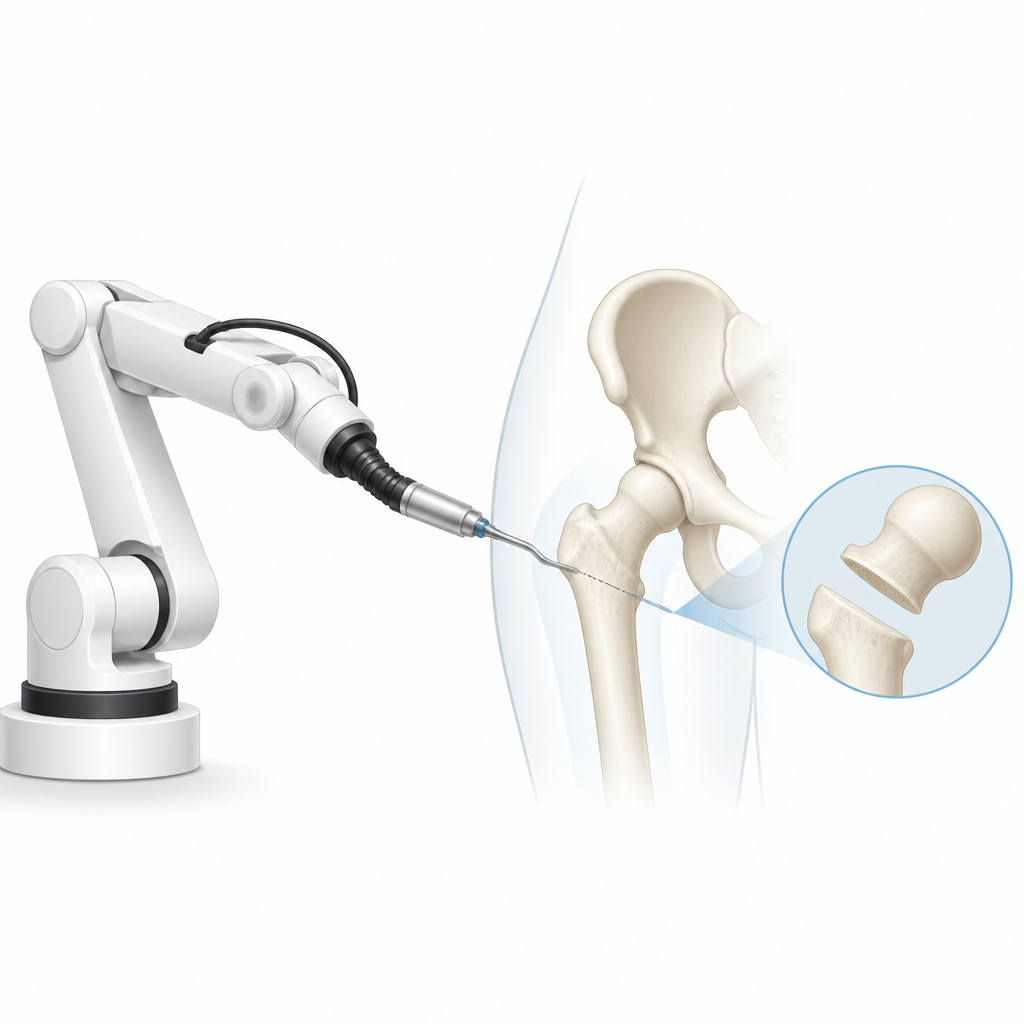
Als chirurgen bot snijden, willen ze nauwkeurigheid en controle terwijl ze zo min mogelijk aangrenzend weefsel verstoren. Ultrasone botscalpels helpen al doordat ze zo snel trillen dat ze met geringe kracht en hoge precisie snijden, maar de commerciële uitvoeringen zijn momenteel omvangrijke handgereedschappen. Ze zijn te groot en te stijf om door de nauwe toegangspunten van keyhole-chirurgie te gaan of om op de flexibele pols van chirurgische robots te passen. Deze studie introduceert een miniatuur ultrasoon botzaagje dat ontworpen is om in krappe ruimtes te werken en door een robotarm gedragen te worden, waardoor fijnere, minder ingrijpende operaties aan wervelkolom en schedel mogelijk worden.
Een nieuwe manier om een ultrasoon lemmet te verkleinen
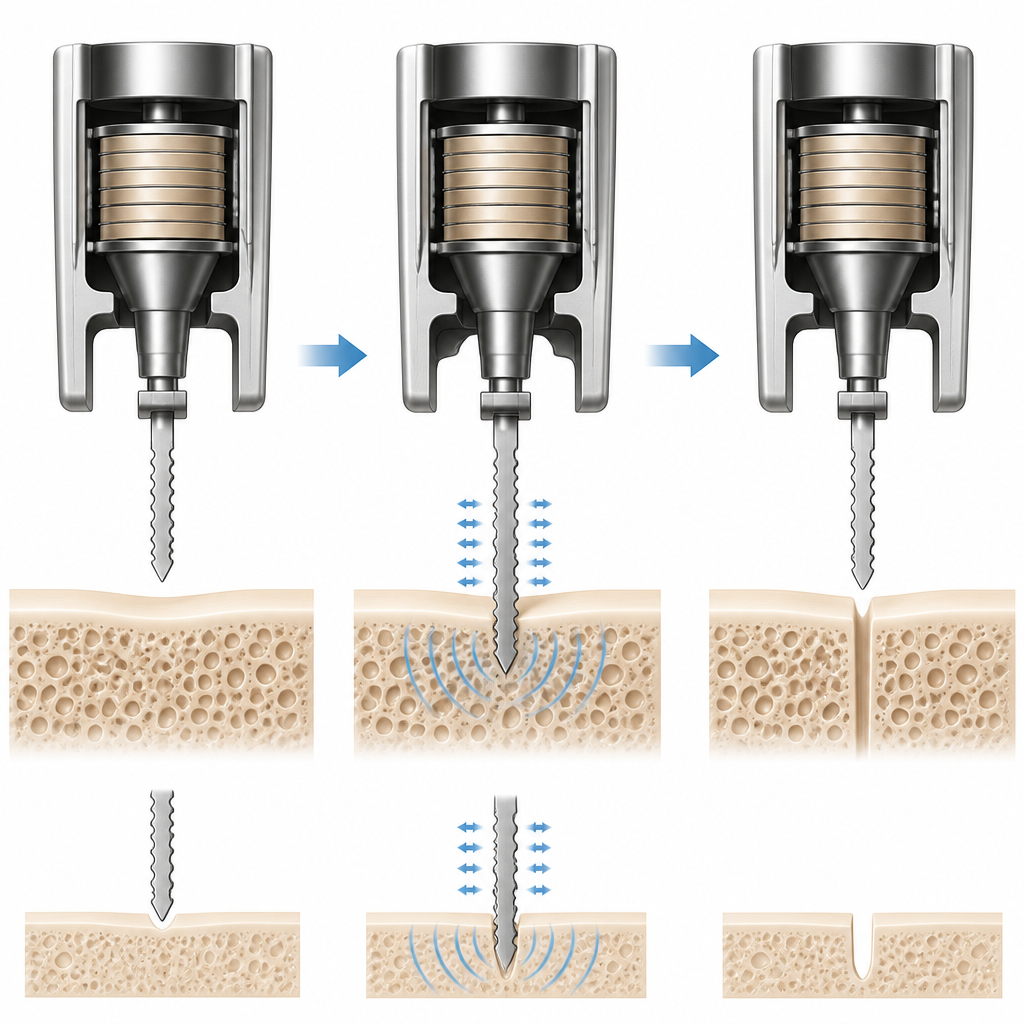
Conventionele ultrasone botinstrumenten zijn opgebouwd rond een met bouten samengeperste stapel keramische ringen die een bepaalde lengte nodig heeft om efficiënt te resoneren. Als je deze constructie eenvoudigweg verkleint, verandert het trillingspatroon, beweegt de punt minder en wordt het lemmet te zwak om bot te snijden. Andere voorgestelde miniatuurontwerpen kunnen ofwel het lemmet niet ver genoeg laten bewegen, of vertrouwen op lijmverbindingen die falen onder sterke trillingen. De onderzoekers losten dit op door de lay-out opnieuw te bedenken. Ze bouwden een compact metalen frame dat aan de ene kant als een veer buigt en aan de andere kant stil blijft, en dreven het aan met een sterk samengedrukte stapel keramische ringen die door een schroef en moeren op hun plaats worden gehouden. Dit "flextension"-frame werkt als een mechanische versterker: kleine bewegingen in de keramische stapel worden omgezet in veel grotere bewegingen bij het snijlemmet. Het hele apparaat is ongeveer zo groot als een vinger en smal genoeg om door gangbare chirurgische toegangsbuisjes te passen, terwijl er ruimte overblijft om aan te sluiten op een robotpols.
Een klein lemmet krachtig en betrouwbaar laten bewegen
Door zijn ongewone vorm gedraagt het nieuwe apparaat zich heel anders dan traditionele ultrasone scalpels wanneer het wordt gevoed. Elektrische tests toonden aan dat het een hoge weerstand tegen stroom heeft en elektrische energie opslaat als een condensator, wat het moeilijker maakt om efficiënt aan te sturen. Het team heeft nauwkeurig gemeten hoe de structuur trilt met behulp van computermodellen en lasermetingen, en bevestigde dat de werkende zijde sterk buigt terwijl de verbindingszijde en de keramische stapel vrijwel stil en recht blijven. Vervolgens ontwierpen ze een elektronisch afstemmingscircuit bestaande uit spoelen en condensatoren om te tunen hoe de voeding het apparaat "ziet", zodat meer elektrische energie wordt omgezet in beweging bij het lemmet. Met deze afstemming behaalde het miniatuurgereedschap trillingsuitslagen van ongeveer 40 tot 60 micrometer aan de lemmetpunt, een niveau dat uit eerder werk bekend is als voldoende om bot te snijden.
Testen van botbewerking met lage kracht en hoge controle
Om te bepalen hoe goed het apparaat snijdt, monteerden de onderzoekers het eerst op een laboratoriumtestopstelling en gebruikten het om door secties varkensrib te zagen, die sterk op menselijk bot lijken. Door te variëren hoe snel het lemmet in het bot werd gedrukt en hoe ver het trilde, maten ze zowel zijwaartse snijkracht als neerwaartse penetratiekracht. Wanneer het lemmet sterk trilde en langzaam werd voortgeduwd, bleven de krachten onder één newton — veel lager dan bij niet-ultrasoon snijden — en bleven de elektrische waarden stabiel. Bij hogere voortsnelheden werd het apparaat moeilijker te beheersen, met aanwijzingen dat de trilling van het ideale ritme afweek. Beelden van de sneden bevestigden dat de beste instellingen diepe, schone naden produceerden terwijl slechtere instellingen minder consistente resultaten gaven. Deze tests toonden ook aan dat er warmte kan ontstaan bij de snede, wat de toekomstige noodzaak voor koeling benadrukt, zoals in commerciële systemen.
Het instrument op een chirurgische robot brengen
Vervolgens werd het miniatuurinstrument bevestigd aan een hoogwaardige Kuka-robotarm via een fijnpositioneringsplatform en een krachtsensor. In deze opstelling leidde de robot het gereedschap door herhaalde korte slagen over het bot terwijl de diepte langzaam toenam, vergelijkbaar met hoe een chirurg een snede zou verlengen. Onder deze omstandigheden bleven snij-, zij- en verticale krachten allemaal onder één newton, zelfs wanneer het lemmet dieper sneed en sneller bewoog. De extra vrijheid van de robot om de positie aan te passen hielp een iets bredere opening te behouden dan het lemmet zelf, wat wrijving verminderde. Microscopisch onderzoek van de resulterende sneden toonde scherpe wanden, minimale afbrokkeling en breedtes binnen ongeveer zes procent van de lemmetdikte, wat uitstekende precisie aangeeft. De temperaturen bij de snijpunt stegen met de snelheid maar bleven beheersbaar voor deze in vitro-testen.
Wat dit kan betekenen voor toekomstige operaties
Dit werk toont aan dat een duimgrootte ultrasoon botzaagje de beweging en kracht kan genereren die nodig zijn voor chirurgie, terwijl het klein genoeg blijft om op een flexibele robotpols te worden bevestigd. Door een slim mechanisch frame te combineren met op maat gemaakte elektronica om de trilling af te stemmen en zorgvuldige controle van snijsnelheid en diepte, bereikten de onderzoekers schone, smalle sneden in bot met zeer lage krachten. Met aanvullende koeling en verdere optimalisatie van lemmetvorm en robotbesturing zouden vergelijkbare instrumenten ooit chirurgen kunnen helpen bot te verwijderen in drukke gebieden van wervelkolom of schedel via piepkleine openingen, waardoor trauma wordt verminderd en de toegang verbetert zonder precisie op te offeren.
Bronvermelding: Li, X., Jones, D., Valdastri, P. et al. A miniature ultrasonic surgical device based on a flextensional configuration with a pre-stressed piezoelectric stack. Commun Eng 5, 95 (2026). https://doi.org/10.1038/s44172-026-00651-2
Trefwoorden: ultrasone botchirurgie, robotchirurgie, minimaal invasief, chirurgische instrumenten, botbewerking