Clear Sky Science · es
Un dispositivo quirúrgico ultrasónico en miniatura basado en una configuración flextensional con un apilamiento piezoeléctrico pretensado
Herramientas más pequeñas para una cirugía ósea más delicada
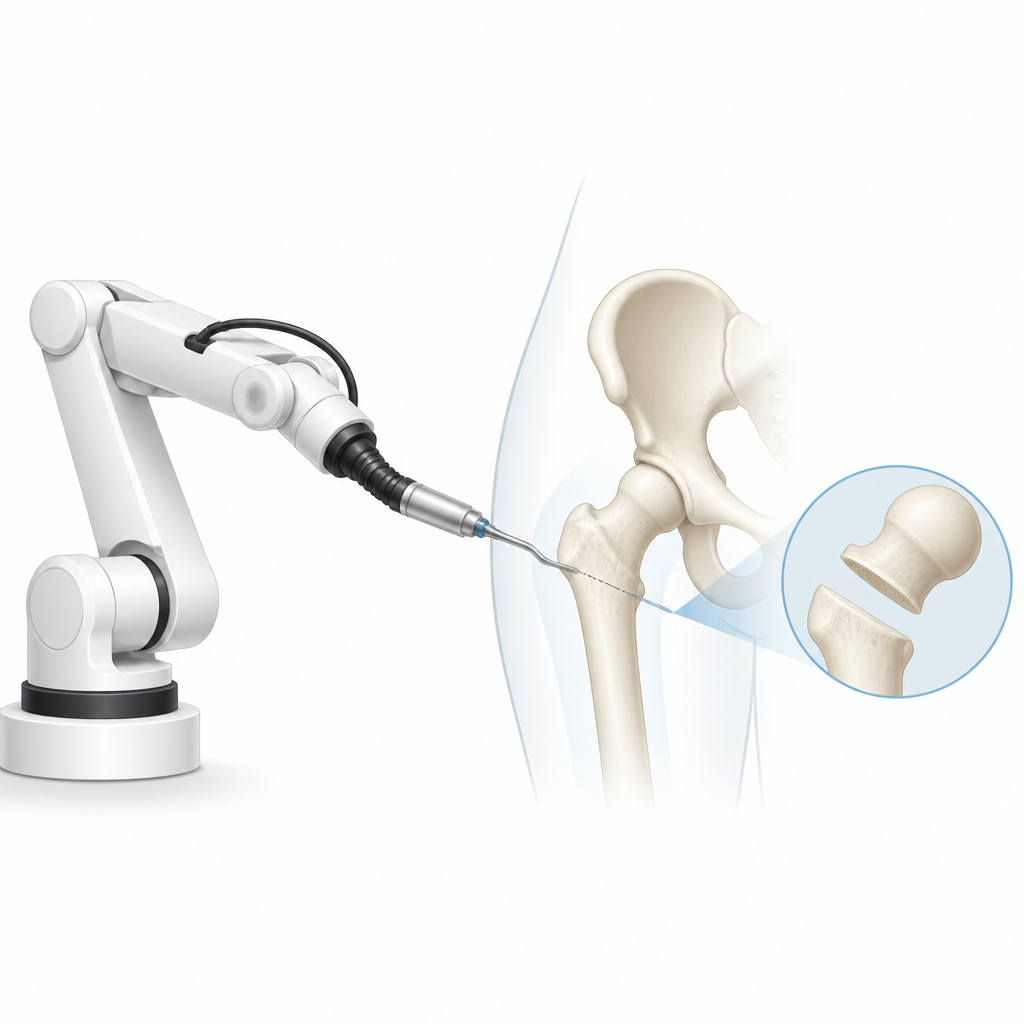
Cuando los cirujanos cortan hueso, buscan precisión y control al tiempo que alteran lo menos posible los tejidos cercanos. Los escalpelos óseos ultrasónicos ya ayudan al vibrar tan rápidamente que cortan con baja fuerza y gran precisión, pero las versiones comerciales actuales son herramientas manuales voluminosas. Son demasiado grandes y rígidas para pasar por los estrechos puntos de entrada usados en la cirugía de llave de paso ni para montarse en la muñeca flexible de robots quirúrgicos. Este estudio presenta una herramienta ultrasónica en miniatura para cortar hueso diseñada para trabajar en espacios reducidos y ser transportada por un brazo robótico, lo que abre la puerta a operaciones más delicadas y menos invasivas en la columna y el cráneo.
Una nueva forma de reducir el tamaño de una hoja ultrasónica
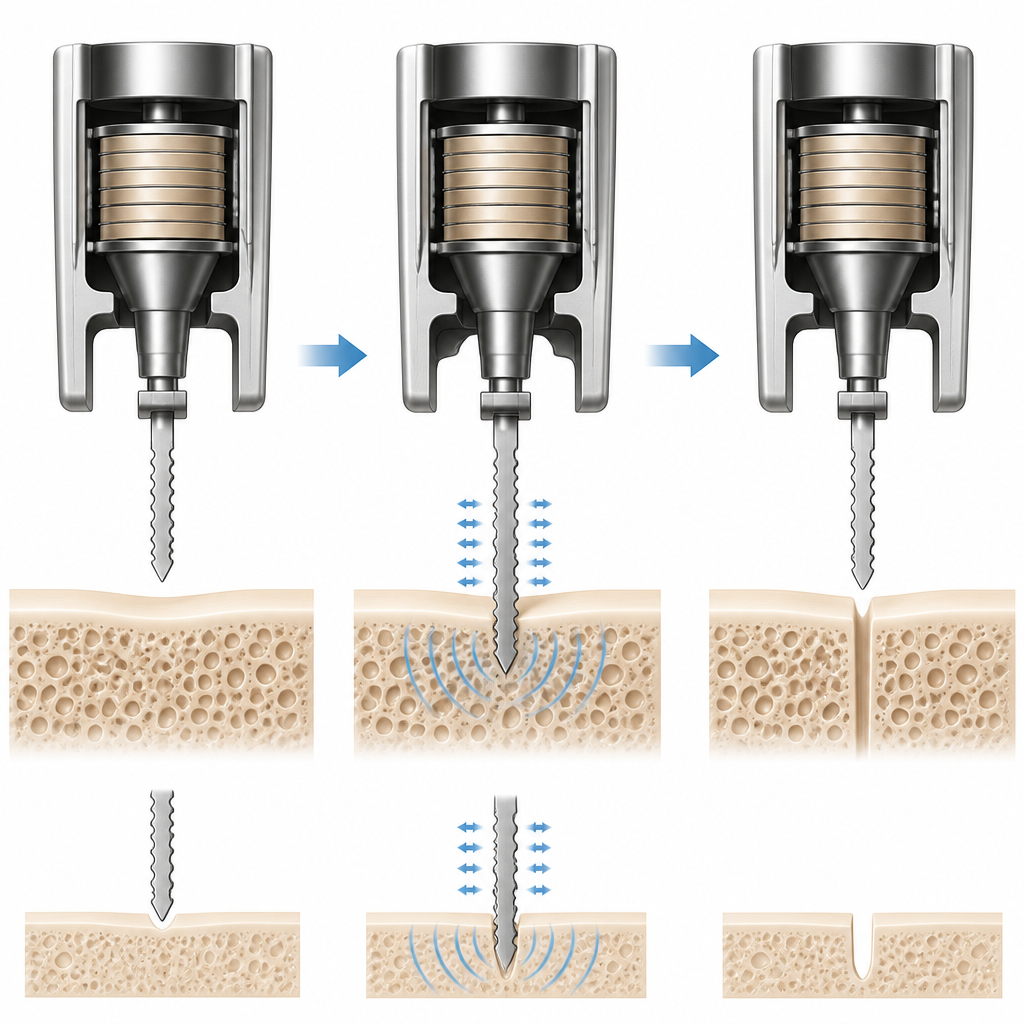
Los dispositivos óseos ultrasónicos estándar se construyen alrededor de un apilamiento atornillado de anillos cerámicos que debe tener cierta longitud para vibrar eficientemente. Si se reduce simplemente esta estructura, el patrón de vibración cambia, la punta se mueve menos y la hoja se vuelve demasiado débil para cortar hueso. Otros diseños propuestos en miniatura o no logran mover la hoja lo suficiente o dependen de uniones con pegamento que fallan bajo vibraciones fuertes. Los investigadores resolvieron esto replanteando la disposición. Construyeron un armazón metálico compacto diseñado para flexionar como un resorte por un lado mientras permanece estable por el otro, y lo accionaron con un apilamiento de anillos cerámicos apretado y sujeto por un tornillo y tuercas. Este armazón “flextensional” actúa como un amplificador mecánico: los movimientos diminutos en el apilamiento cerámico se convierten en movimientos mucho mayores en la hoja de corte. Todo el dispositivo tiene aproximadamente el tamaño de un dedo y es lo bastante estrecho para pasar por tubos de acceso quirúrgico comunes, al tiempo que deja espacio para conectarlo a la muñeca de un robot.
Hacer que una hoja diminuta se mueva con potencia y fiabilidad
Debido a su forma inusual, el nuevo dispositivo se comporta de manera muy distinta a los scalpels ultrasónicos tradicionales cuando se alimenta. Las pruebas eléctricas mostraron que tiene una alta resistencia a la corriente y almacena energía eléctrica como un condensador, lo que lo hace más difícil de conducir de forma eficiente. El equipo midió cuidadosamente cómo vibra la estructura usando modelos por ordenador y mediciones láser, confirmando que el lado de trabajo se flexiona con fuerza mientras que el lado de conexión y el apilamiento cerámico permanecen casi inmóviles y rectos. Luego diseñaron un circuito de adaptación electrónica compuesto por bobinas y condensadores para sintonizar cómo la fuente de alimentación “ve” el dispositivo, de modo que más energía eléctrica se convierta en movimiento en la hoja. Con esta sintonía, la herramienta en miniatura logró oscilaciones de vibración de alrededor de 40 a 60 micrómetros en la punta de la hoja, un nivel que trabajos anteriores han mostrado suficiente para cortar hueso.
Pruebas de corte óseo con baja fuerza y alto control
Para averiguar qué tan bien corta el dispositivo, los investigadores primero lo montaron en un banco de pruebas de laboratorio y lo usaron para serrar secciones de costilla de cerdo, que se parecen mucho al hueso humano. Al variar la velocidad a la que la hoja se empujaba en el hueso y la amplitud de su vibración, midieron tanto la fuerza lateral de corte como la fuerza de penetración vertical. Cuando la hoja vibraba con fuerza y avanzaba lentamente, las fuerzas se mantuvieron por debajo de un newton, muy inferiores a las del corte no ultrasónico, y las lecturas eléctricas se mantuvieron estables. A velocidades de avance más altas el dispositivo se volvió más difícil de controlar, con indicios de que su vibración se desviaba del ritmo ideal. Las imágenes de los cortes confirmaron que los mejores ajustes produjeron huecos profundos y limpios, mientras que configuraciones peores dieron resultados menos consistentes. Estas pruebas también mostraron que puede acumularse calor en el corte, lo que subraya la necesidad futura de refrigeración, como en los sistemas comerciales.
Llevando la herramienta a un robot quirúrgico
A continuación, el dispositivo en miniatura se fijó a un brazo robótico Kuka de alta precisión mediante una plataforma de posicionamiento fino y un sensor de fuerza. En este montaje, el robot guió la herramienta mediante trayectos cortos repetidos a lo largo del hueso mientras aumentaba la profundidad de forma paulatina, similar a cómo un cirujano podría alargar un corte. En estas condiciones, las fuerzas de corte, laterales y verticales se mantuvieron por debajo de un newton incluso cuando la hoja cortó más profundo y se movió más rápido. La libertad adicional del robot para ajustar la posición ayudó a mantener una brecha ligeramente más amplia que la propia hoja, lo que redujo la fricción. La inspección microscópica de los cortes resultantes mostró paredes nítidas, mínimo astillado y anchuras dentro de aproximadamente un seis por ciento del espesor de la hoja, lo que indica una precisión excelente. Las temperaturas en la punta de corte aumentaron con la velocidad pero se mantuvieron manejables en estas pruebas in vitro.
Qué podría significar esto para operaciones futuras
Este trabajo demuestra que un dispositivo ultrasónico para cortar hueso del tamaño de un pulgar puede generar el movimiento y la fuerza necesarios para la cirugía, manteniéndose lo bastante pequeño como para montarse en una muñeca robótica flexible. Al combinar un armazón mecánico inteligente, electrónica adaptada para mantener la vibración sintonizada y un control cuidadoso de la velocidad y la profundidad de corte, los investigadores lograron cortes limpios y estrechos en hueso usando fuerzas muy bajas. Con refrigeración añadida y un mayor ajuste de la forma de la hoja y el control robótico, herramientas similares podrían algún día ayudar a los cirujanos a resecar hueso en áreas congestionadas de la columna o el cráneo a través de pequeñas aberturas, reduciendo el traumatismo y mejorando el acceso sin sacrificar la precisión.
Cita: Li, X., Jones, D., Valdastri, P. et al. A miniature ultrasonic surgical device based on a flextensional configuration with a pre-stressed piezoelectric stack. Commun Eng 5, 95 (2026). https://doi.org/10.1038/s44172-026-00651-2
Palabras clave: cirugía ósea ultrasónica, cirugía robótica, mínimamente invasivo, instrumentos quirúrgicos, corte de hueso