Clear Sky Science · fr
Un dispositif chirurgical ultrasonique miniature basé sur une configuration flextensionnelle avec une pile piézoélectrique précontraint
Des outils plus petits pour une chirurgie osseuse plus douce
Quand les chirurgiens coupent l’os, ils cherchent précision et contrôle tout en perturbant le moins possible les tissus environnants. Les scalps ultrasoniques aident déjà en vibrant si rapidement qu’ils coupent avec une faible force et une grande précision, mais les versions commerciales actuelles sont des instruments manuels encombrants. Ils sont trop grands et trop rigides pour passer par les orifices étroits de la chirurgie cœlioscopique ou pour se fixer sur le poignet articulé des robots chirurgicaux. Cette étude présente un outil de coupe osseuse ultrasonique miniature conçu pour fonctionner dans des espaces confinés et être porté par un bras robotique, ouvrant la voie à des interventions plus délicates et moins invasives sur la colonne vertébrale et le crâne.
Une nouvelle façon de rétrécir une lame ultrasonique
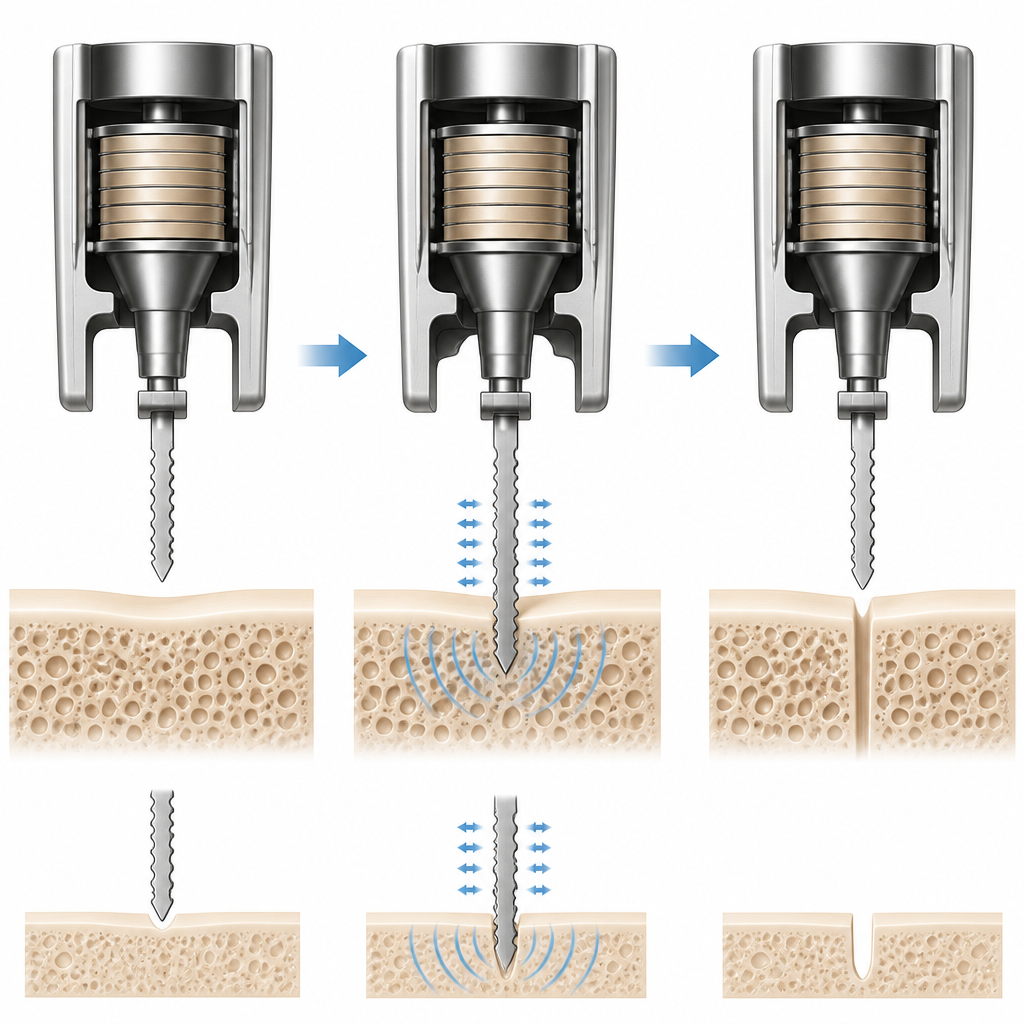
Les dispositifs ultrasoniques osseux classiques sont construits autour d’une pile boulonnée d’anneaux céramiques qui doit avoir une certaine longueur pour vibrer efficacement. Si l’on réduit simplement cette structure, le mode de vibration change, l’amplitude à la pointe diminue et la lame devient trop faible pour couper l’os. D’autres conceptions miniatures proposées ne peuvent soit pas déplacer la lame assez loin, soit s’appuient sur des assemblages collés qui cèdent sous de fortes vibrations. Les chercheurs ont résolu ce problème en repensant l’agencement. Ils ont fabriqué une structure métallique compacte conçue pour fléchir comme un ressort d’un côté tout en restant fixe de l’autre, et l’ont actionnée par une pile d’anneaux céramiques fortement comprimée maintenue par une vis et des écrous. Cette armature « flextensionnelle » agit comme un amplificateur mécanique : de minuscules mouvements dans la pile céramique se transforment en mouvements beaucoup plus grands au niveau de la lame de coupe. L’ensemble de l’appareil a à peu près la taille d’un doigt et est suffisamment étroit pour passer à travers les gaines d’accès chirurgicales courantes, tout en laissant de la place pour la connexion à un poignet robotique.
Faire bouger une petite lame avec puissance et fiabilité
Du fait de sa géométrie inhabituelle, le nouveau dispositif se comporte très différemment des scalpels ultrasoniques traditionnels lorsqu’il est alimenté. Les tests électriques ont montré qu’il présente une forte impédance au courant et stocke l’énergie électrique comme un condensateur, ce qui rend son pilotage moins efficace. L’équipe a mesuré avec soin comment la structure vibre à l’aide de modèles informatiques et de mesures laser, confirmant que le côté actif fléchit fortement tandis que le côté de fixation et la pile céramique restent presque immobiles et droits. Ils ont ensuite conçu un circuit d’adaptation électronique composé de bobines et de condensateurs pour accorder la façon dont l’alimentation « voit » le dispositif, afin de convertir une plus grande partie de l’énergie électrique en mouvement au niveau de la lame. Avec cet accord, l’outil miniature a atteint des amplitudes de vibration d’environ 40 à 60 micromètres à la pointe de la lame, une valeur connue d’études antérieures comme suffisante pour couper l’os.
Tester la coupe osseuse avec faible effort et grand contrôle
Pour évaluer les capacités de coupe, les chercheurs ont d’abord monté l’appareil sur un banc d’essai et l’ont utilisé pour scier des sections de côte de porc, qui ressemblent étroitement à l’os humain. En faisant varier la vitesse d’avancement de la lame et son amplitude de vibration, ils ont mesuré la force de coupe latérale et la force de pénétration verticale. Quand la lame vibrait fortement et avançait lentement, les forces restaient en dessous d’un newton, bien inférieures à celles observées pour une coupe non ultrasonique, et les mesures électriques demeuraient stables. À des vitesses d’avancement plus élevées, le dispositif devenait plus difficile à contrôler, avec des signes d’une dérive de la vibration hors du régime idéal. Les images des entailles ont confirmé que les meilleurs paramètres produisaient des rainures profondes et propres tandis que des réglages moins bons donnaient des résultats moins réguliers. Ces essais ont également montré que la chaleur peut s’accumuler au point de coupe, soulignant le besoin futur de refroidissement, comme dans les systèmes commerciaux.
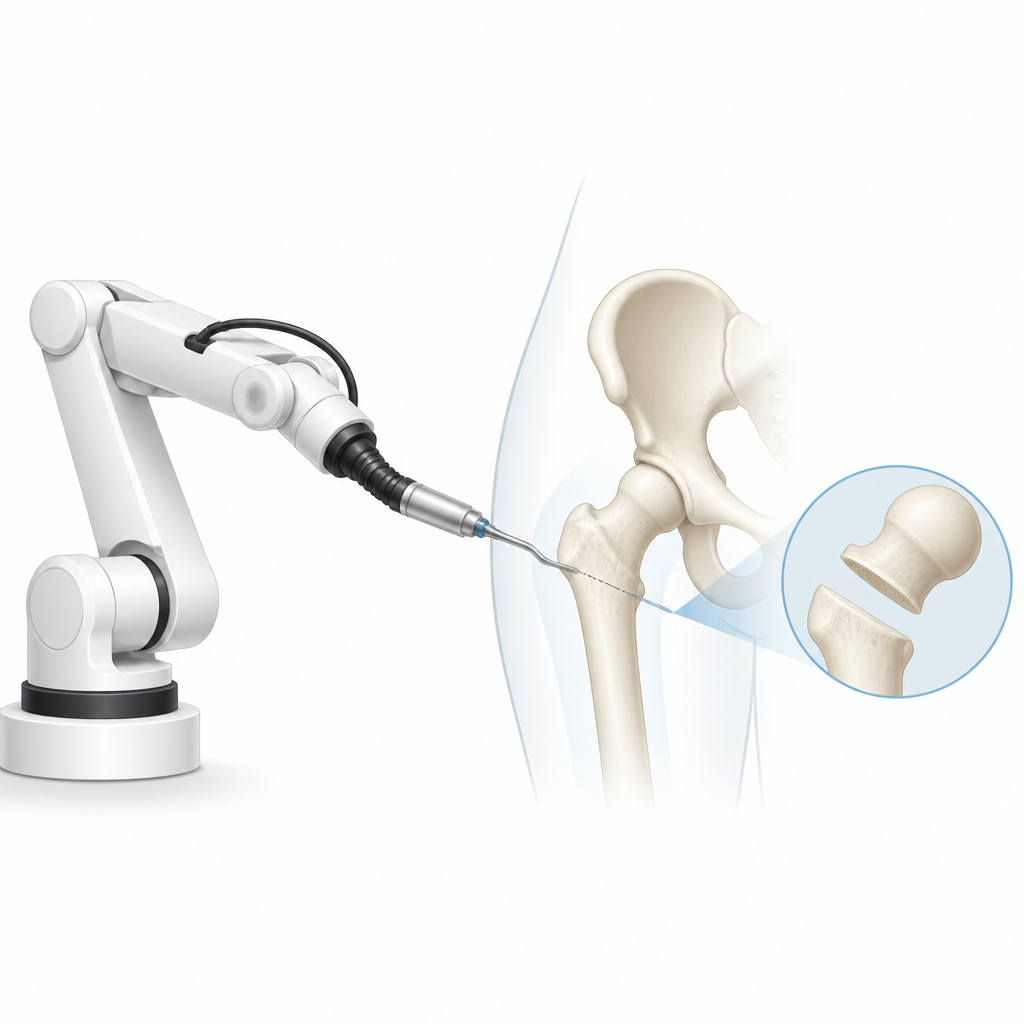
Intégrer l’outil sur un robot chirurgical
Ensuite, l’appareil miniature a été fixé sur un bras robotique Kuka de haute précision via une plateforme de positionnement fin et un capteur de force. Dans cette configuration, le robot guidait l’outil à travers de courtes passes répétées sur l’os tout en augmentant lentement la profondeur, de façon analogue à la manière dont un chirurgien étendrait une incision. Dans ces conditions, la force de coupe, ainsi que les forces latérales et verticales, sont restées en dessous d’un newton, même lorsque la lame creusait plus profondément et se déplaçait plus rapidement. La capacité du robot à ajuster finement la position a aidé à maintenir un écart légèrement plus large que la lame elle‑même, ce qui réduisait le frottement. L’inspection microscopique des coupes obtenues a montré des parois nettes, un écaillage minime et des largeurs dans l’ordre de six pour cent de l’épaisseur de la lame, indiquant une excellente précision. Les températures à la pointe de coupe montaient avec la vitesse mais restaient gérables pour ces tests in vitro.
Ce que cela pourrait signifier pour les opérations futures
Ce travail démontre qu’un dispositif ultrasonique coupe‑os de la taille d’un pouce peut générer le mouvement et la force nécessaires pour la chirurgie tout en restant suffisamment petit pour être porté sur un poignet robotique flexible. En combinant une structure mécanique intelligente, une électronique adaptée pour maintenir l’accord de vibration et un contrôle soigné de la vitesse et de la profondeur de coupe, les chercheurs ont obtenu des incisions propres et étroites dans l’os en utilisant des forces très faibles. Avec l’ajout d’un refroidissement et un ajustement supplémentaire de la forme de la lame et du contrôle robotique, des outils similaires pourraient un jour aider les chirurgiens à retirer de l’os dans des zones encombrées de la colonne vertébrale ou du crâne par de minuscules ouvertures, réduisant les traumatismes et améliorant l’accès sans sacrifier la précision.
Citation: Li, X., Jones, D., Valdastri, P. et al. A miniature ultrasonic surgical device based on a flextensional configuration with a pre-stressed piezoelectric stack. Commun Eng 5, 95 (2026). https://doi.org/10.1038/s44172-026-00651-2
Mots-clés: chirurgie osseuse ultrasonique, chirurgie robotique, mini-invasive, dispositifs chirurgicaux, coupe d’os