Clear Sky Science · tr
Öngerilimli piezoelektrik bloklu bir flektansiyonel konfigürasyona dayanan minyatür ultrasonik cerrahi cihaz
Daha küçük aletler, daha nazik kemik cerrahileri
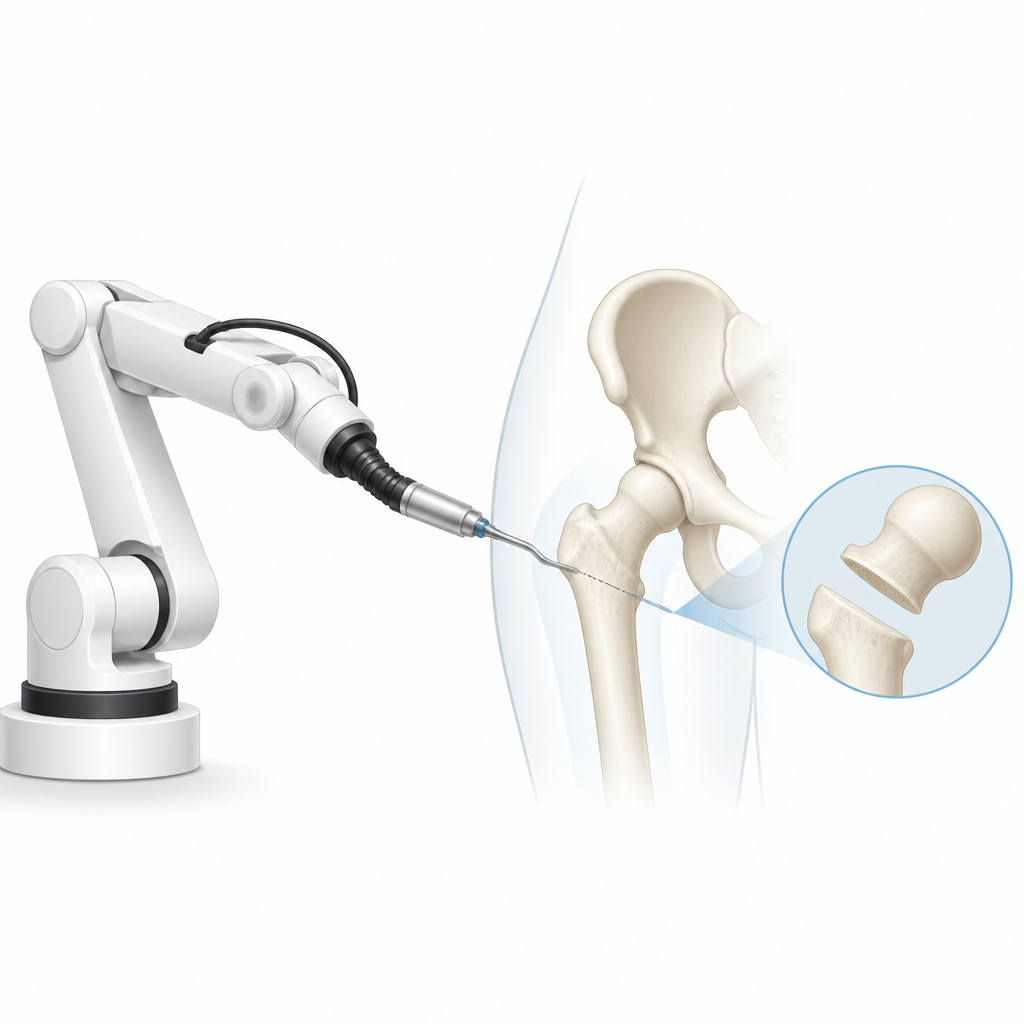
Cerrahlar kemik keserken, çevredeki dokuyu mümkün olduğunca az bozarken doğruluk ve kontrol isterler. Ultrasonik kemik skalpelleri, çok hızlı titreşerek düşük kuvvetle ve yüksek hassasiyetle kesme yapabildikleri için zaten yardımcı oluyor; ancak günümüzün ticari modelleri hantal elde tutulan aletlerdir. Bu aletler, kapak cerrahisinde kullanılan dar giriş noktalarından geçirilmek veya cerrahi robotların esnek bileklerine monte edilmek için çok büyük ve çok serttir. Bu çalışma, dar alanlarda çalışacak ve bir robot kol tarafından taşınabilecek şekilde tasarlanmış minyatür bir ultrasonik kemik kesme aleti sunuyor; bu da omurga ve kafatası gibi bölgelerde daha nazik, daha az invaziv operasyonların yolunu açıyor.
Ultrasonik bıçağı küçültmenin yeni bir yolu
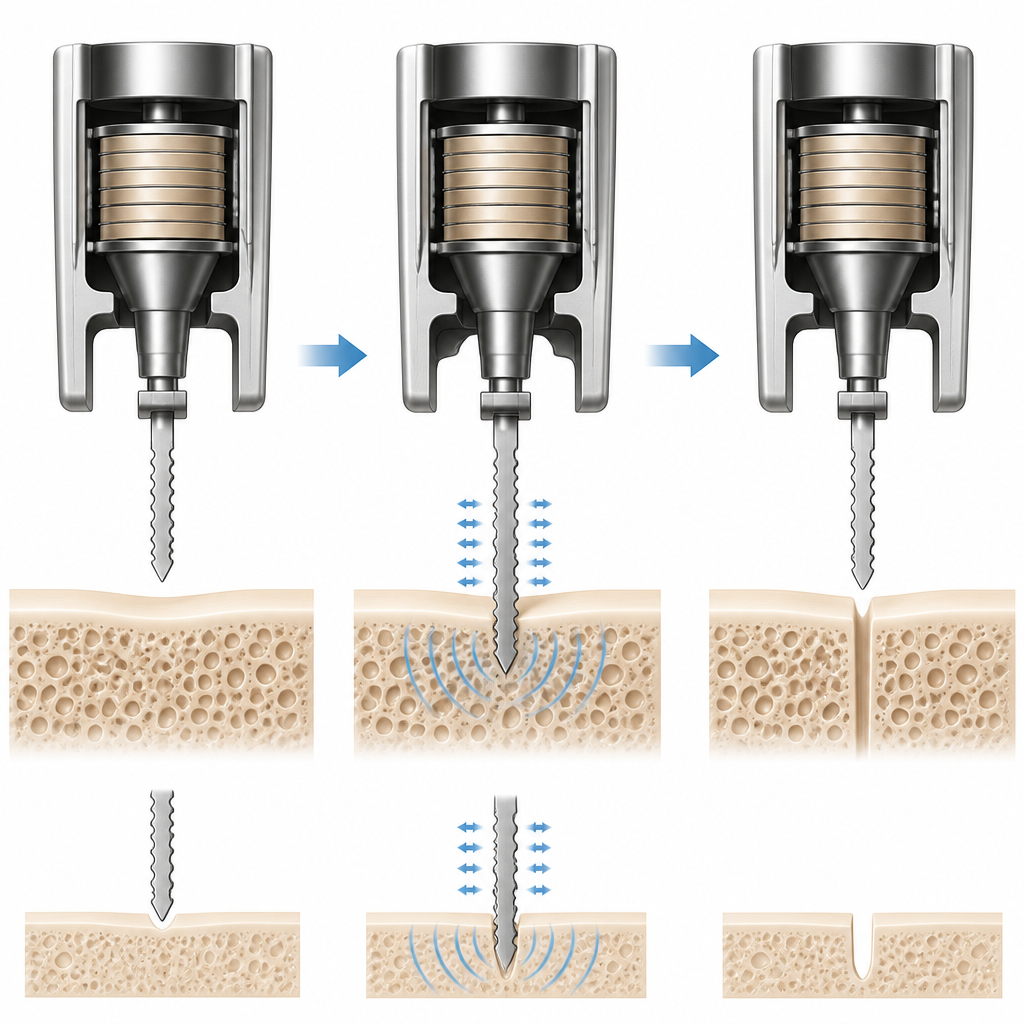
Standart ultrasonik kemik cihazları, verimli titreşim için belirli bir uzunlukta olması gereken cıvatalı seramik halka yığınının etrafında inşa edilir. Bu yapıyı basitçe küçültürseniz, titreşim deseni değişir, uç daha az hareket eder ve bıçak kemiği kesmek için çok zayıf hale gelir. Önerilen diğer minyatür tasarımlar ya bıçağı yeterince hareket ettiremez ya da güçlü titreşim altında bozulan yapıştırma eklerine güvenir. Araştırmacılar bunu düzeni yeniden tasarlayarak çözdü. Bir tarafı yay gibi esneyen, diğer tarafı sabit kalan şekilde esnek davranan kompakt bir metal çerçeve inşa ettiler ve bunu bir vida ve somunlarla sıkıştırılmış, öngerilimli bir seramik halka yığını ile sürdürdüler. Bu “flektansiyonel” çerçeve mekanik bir yükselteç görevi görür: seramik bloktaki çok küçük hareketler kesme bıçağında çok daha büyük hareketlere dönüştürülür. Tüm cihaz bir parmak boyutunda civarındadır ve yaygın cerrahi erişim tüplerinden geçecek kadar incedir; ayrıca bir robot bileğine bağlanmak için de alan bırakır.
Minik bir bıçağı güçlü ve güvenilir şekilde hareket ettirmek
Sıradışı şekli nedeniyle yeni cihaz, enerji verildiğinde geleneksel ultrasonik skalpellere göre çok farklı davranır. Elektriksel testler, cihazın akıma karşı yüksek bir direnç gösterdiğini ve bir kondansatör gibi elektriksel enerjiyi depoladığını, bu yüzden de verimli şekilde sürülmesinin daha zor olduğunu ortaya koydu. Ekip, yapının nasıl titreştiğini bilgisayar modelleri ve lazer ölçümleri ile dikkatle ölçerek, çalışma tarafının güçlü şekilde esnediğini, bağlantı tarafı ve seramik yığının ise neredeyse hareketsiz ve düz kaldığını doğruladı. Ardından, güç kaynağının cihazı “gördüğü” şekilde ayarlamak için bobinler ve kondansatörlerden oluşan bir eşleştirme devresi tasarladılar; böylece daha fazla elektrik enerjisi bıçaktaki harekete dönüştürülebildi. Bu ayarla, minyatür alet bıçak ucunda yaklaşık 40–60 mikrometre arasında titreşim salınımları elde etti; bu seviye, önceki çalışmalardan kemiği kesmek için yeterli olduğu bilinen bir büyüklüktür.
Düşük kuvvet ve yüksek kontrol ile kemik kesimini test etmek
Aletin kesme performansını değerlendirmek için araştırmacılar önce cihazı bir laboratuvar test düzeneğine monte edip insan kemiğine yakın özellikler gösteren domuz kaburga bölümlerini test ettiler. Bıçağın kemiğe itme hızı ve titreşim genliğini değiştirerek hem yanal kesme kuvvetini hem de dikey penetrasyon kuvvetini ölçtüler. Bıçak güçlü titreştiğinde ve yavaş ilerlediğinde, kuvvetler 1 newtonun altında kaldı; bu, ultrasonik olmayan kesime göre çok daha düşüktü ve elektriksel ölçümler kararlı kaldı. Daha yüksek ilerleme hızlarında cihaz kontrolü zorlaştı ve titreşimin ideal ritminden uzaklaştığına dair işaretler görüldü. Kesim görüntüleri, en iyi ayarların derin, temiz boşluklar ürettiğini; daha zayıf ayarların ise daha tutarsız sonuçlara yol açtığını doğruladı. Bu testler ayrıca kesim bölgesinde ısının birikebileceğini gösterdi; bu da ticari sistemlerde olduğu gibi soğutmanın ileride gerekeceğini vurguluyor.
Aleti cerrahi bir robota entegre etmek
Sonra minyatür cihaz, hassas konumlandırma platformu ve bir kuvvet sensörü aracılığıyla yüksek hassasiyetli bir Kuka robot koluna bağlandı. Bu düzenekte robot, cerrahın bir kesimi uzatmasına benzer şekilde aleti tekrarlayan kısa stroklarla kemiğin üzerinden geçirirken derinliği yavaşça artırdı. Bu koşullar altında kesme, yanal ve dikey kuvvetlerin tümü, bıçak daha derine ve daha hızlı ilerlese bile 1 newtonun altında kaldı. Robotun ek konum ayarı serbestliği, bıçağın kendisinden biraz daha geniş bir boşluk korunmasına yardımcı oldu; bu da sürtünmeyi azalttı. Ortaya çıkan kesimlerin mikroskobik incelemesi, keskin duvarlar, minimal kırılma ve bıçak kalınlığına yaklaşık yüzde altı içinde kalan açıklıklar gösterdi; bu, mükemmele yakın bir hassasiyeti işaret ediyor. Kesim ucundaki sıcaklık hızla artışla yükseldi ama bu in vitro testler için yönetilebilir düzeyde kaldı.
Gelecekteki ameliyatlar için olası etkileri
Bu çalışma, başparmak boyutunda bir ultrasonik kemik kesme cihazının, esnek bir robot bileğine sığacak kadar küçük kalırken cerrahi için gereken hareket ve gücü üretebileceğini gösteriyor. Akıllı bir mekanik çerçeve, titreşimi ayakta tutmak için özelleştirilmiş elektronikler ve kesme hızı ile derinliğinin dikkatli kontrolünün birleşimiyle, araştırmacılar çok düşük kuvvetler kullanarak kemiğe dar, temiz kesiler elde ettiler. Ek soğutma ve bıçak şekli ile robot kontrolünün daha fazla ayarlanmasıyla, benzer aletler bir gün omurga veya kafatasının kalabalık bölgelerinde cerrahların küçük açıklıklardan kemiği çıkarmasına yardımcı olabilir; böylece travmayı azaltıp erişimi iyileştirirken hassasiyetten ödün verilmemiş olur.
Atıf: Li, X., Jones, D., Valdastri, P. et al. A miniature ultrasonic surgical device based on a flextensional configuration with a pre-stressed piezoelectric stack. Commun Eng 5, 95 (2026). https://doi.org/10.1038/s44172-026-00651-2
Anahtar kelimeler: ultrasonik kemik cerrahisi, robotik cerrahi, minimal invaziv, cerrahi cihazlar, kemik kesimi