Clear Sky Science · zh
通过实时顺应性估计和双模控制实现自适应机器人引导
教机器人做更好的助理
想象一下学习新舞步或康复受伤的肩膀。人类教练不仅会把你的手臂推到位,还会提供分步骤的提示和鼓励。相比之下,现有机器人通常要么默默移动你的肢体,要么只会说话却无法接触。本论文提出了一种让机器人将触觉与语音融合的新方法,能够实时根据人跟随程度进行自适应,使帮助更安全、更自然、也更有效。
为何触觉与语音的融合重要
人类教师会不断调整他们在身体引导和口头解释之间的力度。如果你偏离轨迹,他们可能会更用力地移动你的手臂并给出明确指令;随着你进步,他们会逐渐放手,提供更轻的引导并更多鼓励。机器人在实现这种平衡上遇到困难,因为物理力与语言是截然不同的信号。作者旨在赋予机器人类似教练的直觉:估计一个人跟随引导的意愿与能力,然后决定何时施力、何时说话、以及如何将两者结合。
自适应机器人教练如何工作
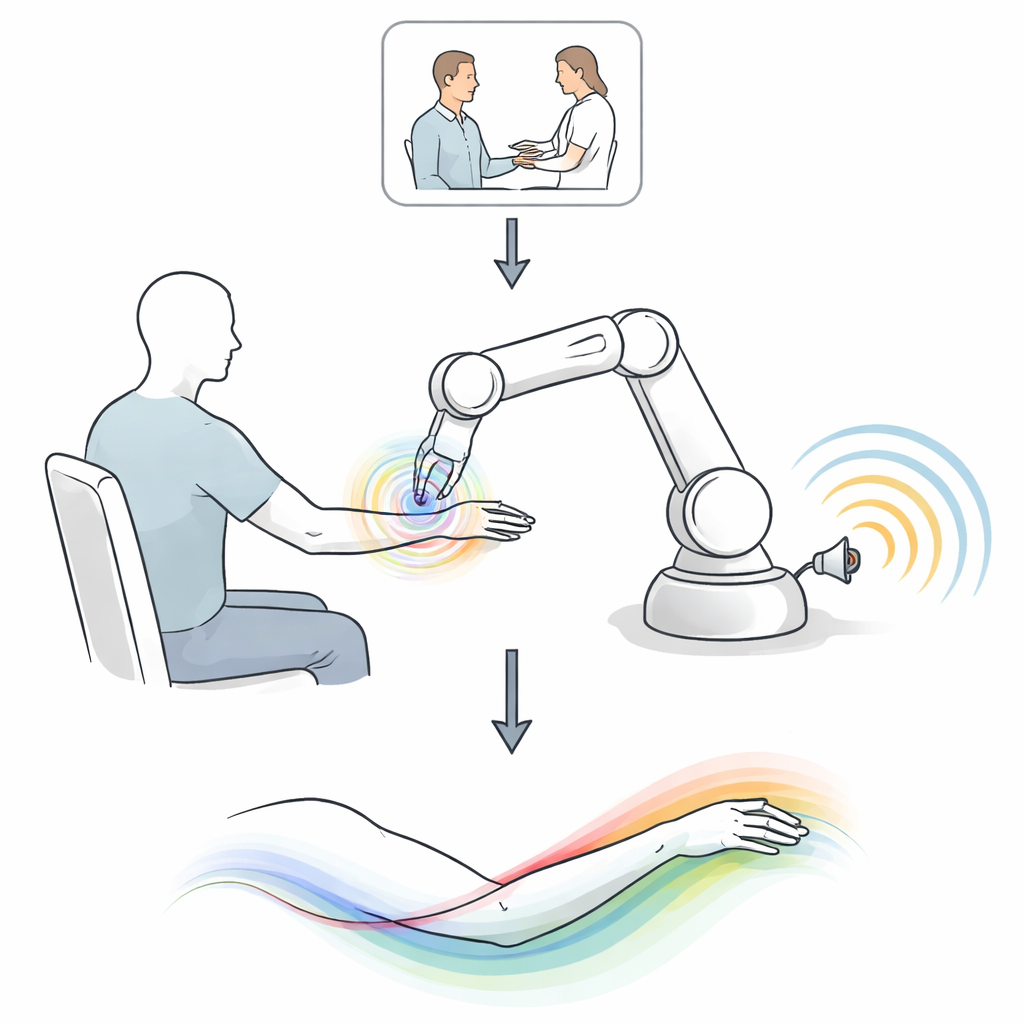
团队设计了一个包含三部分的机器人引导控制器。首先,它持续估计“顺应性”——即一个人多大程度上遵循期望动作——使用诸如目标位置与实际位置差距以及动作平滑度等简单衡量指标。其次,一个优化步骤决定应通过物理力还是口头提示来实施多少纠正,并随着被引导者行为的变化调整两者的权重。第三,将力学计划转换为语言的模型把机器人的内部计划生成简短、情境适宜的短语,例如温和的提示或鼓励,基于从真实物理治疗师那里学到的模式。三者协同使机器人能够实时协调其“手”和“声音”。
向专家治疗师学习
为使系统基于真实教学行为,研究者观察了物理治疗师与患者共同完成一项简单但临床重要的任务:从身体侧面将手臂抬到头顶再放回。在精心记录的会话中,治疗师有时仅用语言引导、有时仅用触觉、有时两者并用。团队发现了明确模式:当患者抵抗或挣扎时,治疗师会使用更强的物理辅助并更频繁地给出指示性言语;随着患者更好地跟随,治疗师会放松握力、减少讲话频率,并从命令转向鼓励。这些模式直接启发了机器人如何估计顺应性以及何时依赖力、语言或两者的混合策略。
对机器人教练的测试
新控制器在十二名健康志愿者上进行了评估,参与者与协作机器人一同完成相同的肩部抬举练习。在一组试验中,研究者比较了单一帮助模式——仅口头提示、仅物理力——与一种始终以固定方式结合两者的基础双模控制器。在第二组研究中,他们将该固定双模设置与他们的自适应机器人引导控制器进行了比较。性能通过参与者与目标路径的贴合程度、动作平滑度、完成所需时间以及机器人语言模式的变化来衡量。
实验揭示了什么
总体来看,触觉与语言的结合通常优于仅使用其中一种,尤其是在新增通道是参与者实际上唯一注意到的那一类时。在某些情况下,加入物理引导将位置误差削减超过一半,使动作显著更平滑、更快速。自适应控制器进一步改进了效果,将追踪误差最多降低约50%,提升平滑度,并相比固定双模基线将完成时间缩短约四分之一。值得注意的是,其语言模式——发话频率以及从指令向鼓励的转换——与专家治疗师更为接近,参与者也评价自适应引导更自然、更像与人类教练合作。

这对日常生活可能意味着什么
对非专业人士来说,结论是:可以教会机器人像熟练的人类教练那样引导人——用混合的轻触和及时的话语,并随着你的学习而调整。虽然这项工作在康复练习中演示,但其基本理念可扩展到书写教学、体育技能或复杂工作任务。通过感知一个人对引导的响应并动态调整物理与口头帮助,未来的机器人可能不仅是精确的机器,还能成为耐心、反应灵敏的学习与康复伙伴。
引用: Tejwani, R., Payne, J., Velazquez, K. et al. Adaptive robot guidance through real-time compliance estimation and dual-modal control. Commun Eng 5, 81 (2026). https://doi.org/10.1038/s44172-026-00632-5
关键词: 人机交互, 康复机器人学, 自适应引导, 机器人辅导, 多模态控制