Clear Sky Science · ja
リアルタイム準応性推定と二重モーダル制御による適応型ロボットガイダンス
より良い助け手としてロボットを教える
新しいダンスの動きを覚えたり、痛めた肩をリハビリしたりする場面を想像してください。人間の指導者はただ腕を押し当てるだけでなく、段階的なアドバイスや励ましも与えます。これに対して今日のロボットは、触れて動かすか、あるいは話すかのどちらかに偏ることが多く、両方を自然に組み合わせることは少ないです。本稿は、触覚と音声をブレンドし、人がどれだけ指導に従えているかをリアルタイムで適応的に推定して、より安全で自然、かつ効果的な支援を可能にする新しい手法を紹介します。
触覚と音声を組み合わせる重要性
人間の教師は、どれだけ物理的に導くかとどれだけ言葉で補助するかを絶えず調整します。受講者がずれているときは腕をしっかり支えて明確な指示を出し、上達すると介入を緩め、軽い導きや励ましに切り替えます。ロボットがこれを実現するのは難しく、物理的な力と発話は性質の異なる信号だからです。著者らは、指導者の直感に相当する仕組み―人がどれだけ指導に従う意欲や能力があるかを推定し、いつ押すべきか、いつ話すべきか、両者をどう組み合わせるかを決める方法―をロボットに与えることを目指しました。
適応型ロボットコーチの仕組み
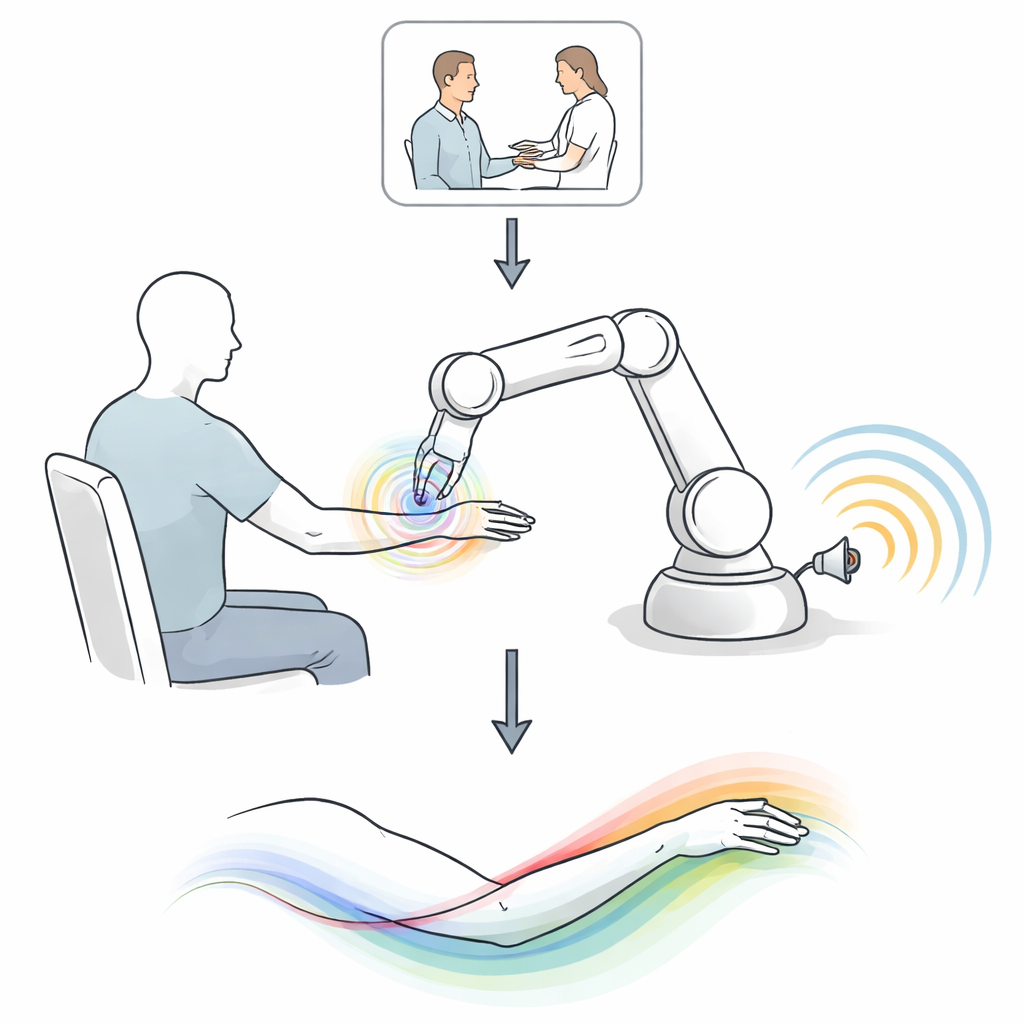
研究チームはロボットガイダンスコントローラを三つの主要部分で設計しました。第一に、「準応性(コンプライアンス)」を連続的に推定します。これは、望ましい動きと実際の位置のずれや、動きの滑らかさといった単純な指標から算出されます。第二に、最適化ステップで修正を物理的な力として与える割合と音声による合図の割合を決定し、被支援者の行動に応じてバランスをシフトさせます。第三に、力の計画を短い文脈適切なフレーズに変換する力→言語モデルを搭載し、穏やかな助言や励ましといった表現を実際の理学療法士のデータから学習したパターンに基づいて生成します。これらが連携することで、ロボットは手と“声”の両方をリアルタイムで調整できます。
専門的なセラピストから学ぶ
システムを実際の指導行動に根づかせるため、研究者らは臨床的に重要な単純課題――腕を体側から頭上まで挙げて戻す動作――を患者と行う理学療法士の挙動を調査しました。録画したセッションでは、治療者が言葉だけで導く場合、触覚だけで導く場合、両方を使う場合がありました。解析の結果、明確なパターンが見られました。患者が抵抗したり苦労したりすると、治療者はより強い物理的支援と頻繁な指示的発話を用い、患者がより従うようになると把持を緩め、発話頻度を下げ、命令的な言葉から励ましへと切り替えていました。これらのパターンが、ロボットが準応性を推定し、力や音声、あるいはその組み合わせに頼るべきタイミングを決める方法の直接的な着想源となりました。
ロボットコーチの評価
新しいコントローラは、同じ肩挙上運動を行う12名の健康な被験者を対象に協働ロボットとともに評価されました。ある一連の試行では、言語のみ、物理力のみという単一モードの援助と、常に固定された比率で両者を組み合わせる基本的な二重モードコントローラを比較しました。第二の実験では、その固定された二重モードと提案する適応型ロボットガイダンスコントローラを比較しました。性能は、参加者が意図した軌道にどれだけ近いか、動きの滑らかさ、完了に要した時間、そしてロボットの発話パターンの変化で測定されました。
実験が明らかにしたこと
全体として、触覚と発話を組み合わせることは、いずれか一方だけを用いるよりも有利であることが多く、特に追加されたチャネルが参加者が実際に注目する唯一の手段であった場合に顕著でした。場合によっては、物理的なガイダンスを加えることで位置誤差を半分以上削減し、動作が著しく滑らかで速くなりました。さらに適応型コントローラは追跡誤差を最大で約50%削減し、滑らかさを改善し、完了時間を固定二重モードに比べ約4分の1短縮しました。特に、その発話パターン(発話頻度や指示から励ましへの移行)は専門家の治療者により近く、参加者は適応型ガイダンスをより自然で人間のコーチに近いと評価しました。

日常生活への可能性
非専門家にとっての要点は、ロボットが熟練した人間の指導者のように、やさしい触れ方とタイミングの良い言葉を組み合わせて、学習に応じて支援の度合いを変えられるよう教育できるということです。本研究はリハビリ運動で示されましたが、基礎となる考え方は筆跡指導、スポーツ技能、あるいは複雑な業務の教育などにも応用できる可能性があります。人の反応の良し悪しを感知し、物理的・言語的支援をその場で調整できる未来のロボットは、単に正確な機械であるだけでなく、学習と回復に寄り添う辛抱強く反応的なパートナーになり得るでしょう。
引用: Tejwani, R., Payne, J., Velazquez, K. et al. Adaptive robot guidance through real-time compliance estimation and dual-modal control. Commun Eng 5, 81 (2026). https://doi.org/10.1038/s44172-026-00632-5
キーワード: ヒューマンロボットインタラクション, リハビリテーションロボティクス, 適応型ガイダンス, ロボティックコーチング, マルチモーダル制御