Clear Sky Science · he
הדרכה אדפטיבית של רובוט באמצעות הערכת ציות בזמן אמת ובקרת דואל-מודאלית
ללמד רובוטים להיות עוזרים טובים יותר
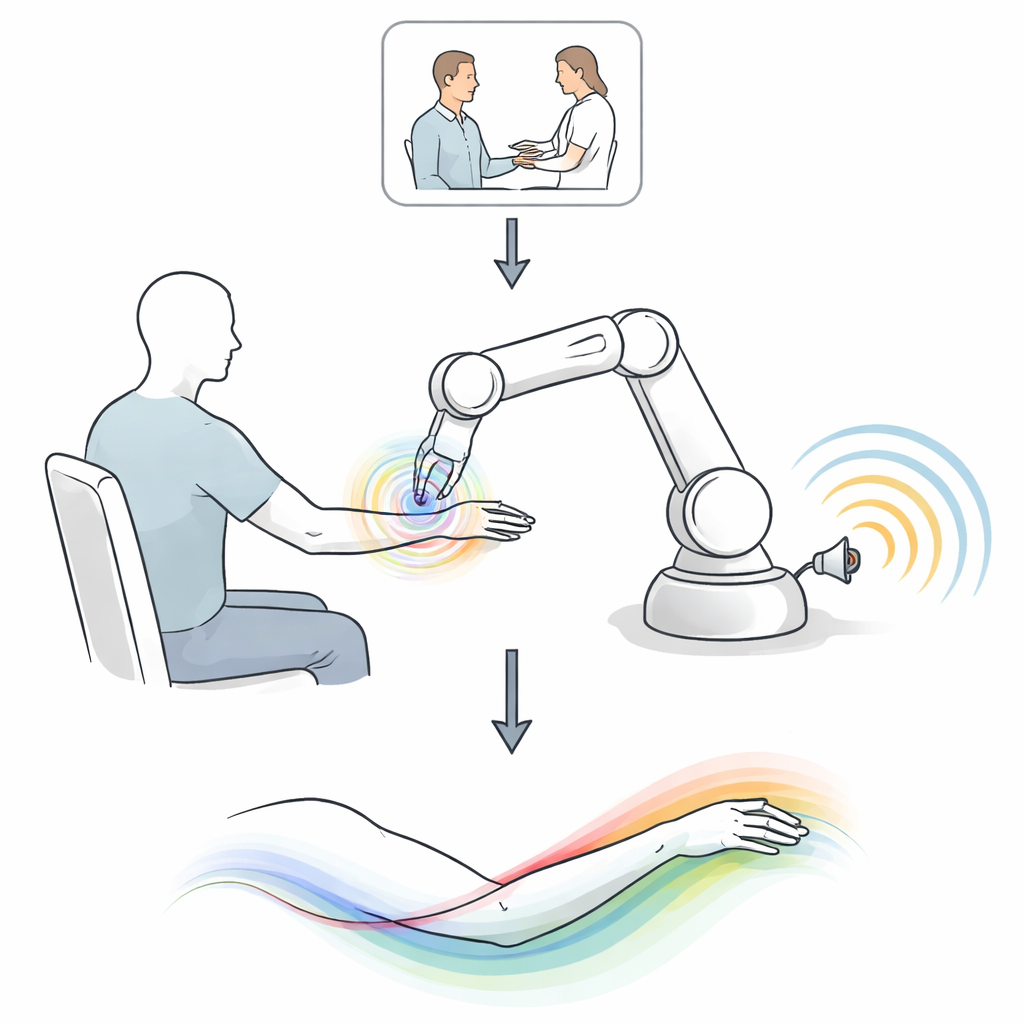
דמיינו שלמידת תנועת ריקוד חדשה או שיקום כתף פצוע. מדריך אנושי לא רק מזיז את הזרוע למקומה; הוא גם נותן טיפים והגברה שלב אחרי שלב. לעומת זאת, רובוטים של היום בדרך כלל או מזיזים אותך בשתיקה או מדברים בלי יכולת לגעת. מאמר זה מציג שיטה חדשה המאפשרת לרובוטים לשלב מגע ודיבור, ולהתאים בזמן אמת עד כמה האדם עוקב אחרי ההנחיות — כך שהסיוע יהיה בטוח יותר, טבעי יותר ויעיל יותר.
למה חשובה שילוביות של מגע וקול
מורים אנושיים מתאימים באופן מתמיד עד כמה הם מדריכים פיזית מול כמה הם מדברים. אם אתה יוצא מהנתיב, הם עשויים להזיז את הזרוע בביטחון ולתת הנחיות ברורות. ככל שאתה משתפר, הם נענים ומספקים הדרכה קלה יותר ולעתים עידוד. רובוטים נאבקים לעשות זאת כי כוחות פיזיים ושפה מדוברת הם סוגים שונים מאוד של אותות. המחברים שואפים לתת לרובוט משהו כמו האינטואיציה של מדריך: דרך לאמוד עד כמה אדם מוכן ויכול להיענות להדרכה, ואז להחליט מתי לדחוף, מתי לדבר וכיצד לשלב את שניהם.
איך מאמן הרובוט האדפטיבי עובד
הצוות תכנן בורר הנחיית רובוט המורכב משלושה חלקים עיקריים. ראשית, הוא מעריך באופן רציף "ציות" — עד כמה האדם עוקב אחרי התנועה הרצויה — באמצעות מדדים פשוטים כמו הפער בין המקום שבו הזרוע אמורה להיות למקום שבה באמת נמצאת וכמה חלקה התנועה. שנית, שלב אופטימיזציה מחליט כמה מהתיקון יבוצע באמצעות כוח פיזי מול רמזים מדוברים, ומשנה את האיזון כשהתנהגות האדם משתנה. שלישית, מודל הממיר כוח לשפה מתרגם את תוכניות הרובוט לביטויים קצרים ועמודים בהקשר, כמו טיפים עדינים או עידוד, בהתבסס על תבניות שנלמדו מטיפולים של פיזיותרפיסטים אנושיים. ביחד, יסודות אלה מאפשרים לרובוט לתאם את ידיו ואת "קולו" בזמן אמת.
ללמוד ממטפלים מומחים
כדי לעגן את המערכת בהתנהגות הוראה אמיתית, החוקרים בחנו פיזיותרפיסטים העובדים עם מטופלים במשימה פשוטה אך קלינית חשובה: הרמת הזרוע מהצד לגובה ולחזרה. במפגשים שהוקלטו בקפידה, המטפלים לפעמים הנחו רק בדיבור, לפעמים רק במגע ולפעמים בשניהם. הצוות מצא דפוסים ברורים. כאשר מטופלים התנגדו או נאבקו, המטפלים השתמשו בסיוע פיזי חזק יותר ובדיבור תדיר ובהדרכתי יותר. ככל שהמטופלים עקבו יותר, המטפלים הקלו את האחיזה, דיברו פחות והחליפו פקודות בעידוד. דפוסים אלה היוו השראה ישירה לאופן שבו הרובוט מעריך ציות ומחליט מתי להסתמך על כוח, דיבור או שילוב של שניהם.
להעמיד את מאמן הרובוט למבחן
הבורר החדש הוערך עם תריסר מתנדבים בריאים שביצעו את תרגיל הרמת הכתף לצד רובוט משתף פעולה. בקבוצת ניסויים השוו החוקרים מצבי סיוע יחידיים — רמזים רק בע
ציטוט: Tejwani, R., Payne, J., Velazquez, K. et al. Adaptive robot guidance through real-time compliance estimation and dual-modal control. Commun Eng 5, 81 (2026). https://doi.org/10.1038/s44172-026-00632-5
מילות מפתח: אינטראקציה אדם-רובוט, רובוטיקה שיקומית, הדרכה אדפטיבית, אימון רובוטי, בקרה מולטי-מודאלית