Clear Sky Science · pt
Orientação robótica adaptativa por meio de estimativa de conformidade em tempo real e controle dual-modal
Ensinando Robôs a Serem Melhores Ajudantes
Imagine aprender um novo movimento de dança ou reabilitar um ombro dolorido. Um instrutor humano não apenas empurra seu braço para a posição; ele também oferece dicas passo a passo e encorajamento. Em contraste, os robôs atuais geralmente ou movem você em silêncio ou falam sem conseguir tocar. Este artigo introduz uma nova forma de os robôs combinarem toque e fala, adaptando-se em tempo real a quão bem a pessoa está acompanhando, de modo que a ajuda pareça mais segura, natural e eficaz.
Por que Misturar Toque e Voz Importa
Professores humanos ajustam constantemente quanto orientam fisicamente versus quanto falam. Se você estiver fora do trajeto, eles podem movimentar seu braço com firmeza e dar instruções claras. À medida que você melhora, eles recuam, oferecendo orientação mais leve e mais incentivo. Os robôs têm dificuldade para fazer isso porque forças físicas e linguagem falada são tipos de sinais muito diferentes. Os autores buscaram dar ao robô algo parecido com a intuição de um instrutor: uma maneira de estimar quão disposto e capaz a pessoa está de seguir a orientação, e então decidir quando empurrar, quando falar e como combinar ambos.
Como Funciona o Treinador Robótico Adaptativo
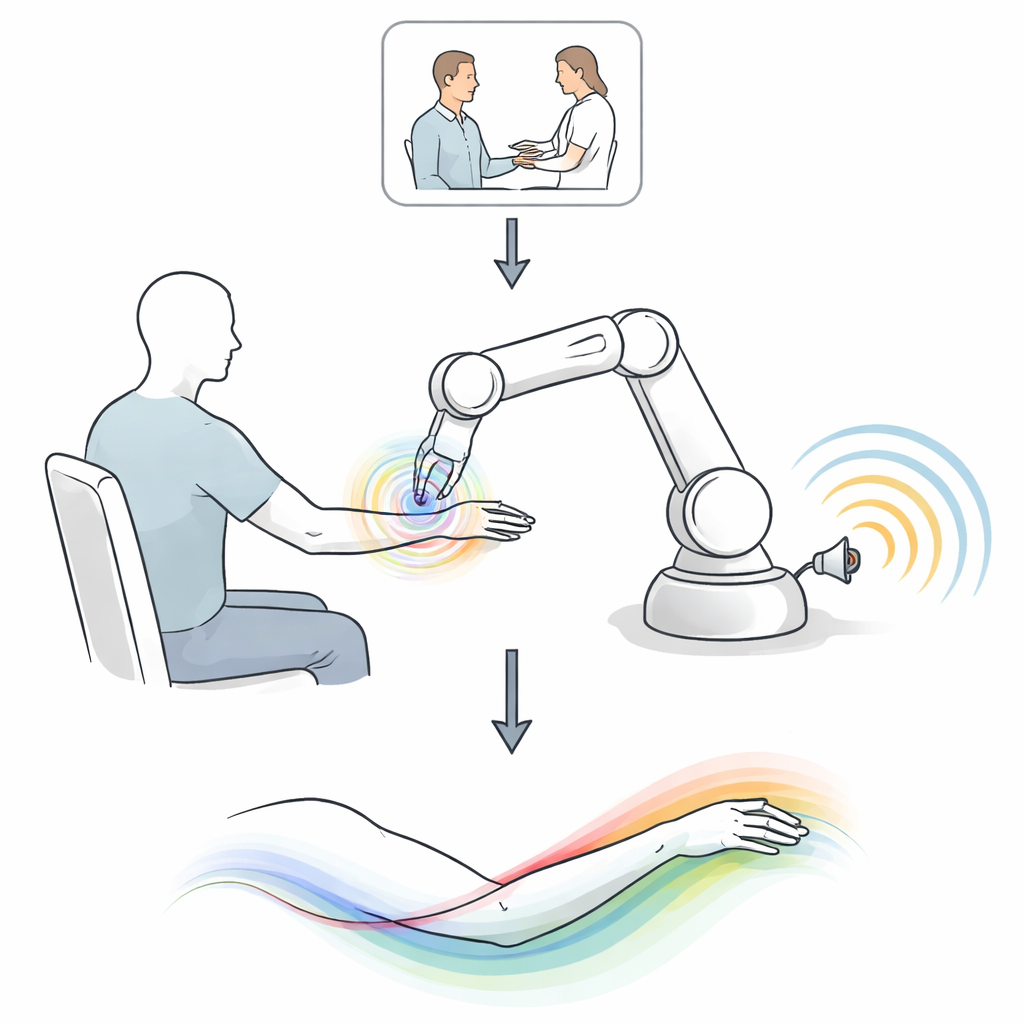
A equipe projetou um Controlador de Orientação Robótica com três partes principais. Primeiro, ele estima continuamente a “conformidade” — o quão de perto a pessoa segue o movimento desejado — usando medidas simples como a diferença entre onde o braço deveria estar e onde ele está, e quão suavemente está se movendo. Segundo, um passo de otimização decide quanto da correção deve vir por meio de força física versus sinais verbais, mudando o equilíbrio conforme o comportamento da pessoa muda. Terceiro, um modelo força-para-linguagem converte os planos internos do robô em frases curtas e apropriadas ao contexto, como dicas suaves ou encorajamento, com base em padrões aprendidos de terapeutas humanos. Em conjunto, esses elementos permitem que o robô coordene suas “mãos” e sua “voz” em tempo real.
Aprendendo com Terapeutas Especialistas
Para fundamentar o sistema em comportamento de ensino do mundo real, os pesquisadores estudaram fisioterapeutas trabalhando com pacientes em uma tarefa simples, porém clinicamente importante: levantar o braço do lado do corpo até acima da cabeça e retornar. Em sessões cuidadosamente registradas, os terapeutas às vezes orientavam apenas com fala, às vezes apenas com toque e às vezes com ambos. A equipe encontrou padrões claros. Quando os pacientes resistiam ou tinham dificuldade, os terapeutas usavam assistência física mais forte e fala instrucional mais frequente. À medida que os pacientes seguiam mais de perto, os terapeutas afrouxavam a pegada, falavam com menos frequência e mudavam de comandos para encorajamento. Esses padrões inspiraram diretamente como o robô estima a conformidade e decide quando apoiar-se na força, na fala ou em uma mistura das duas.
Testando o Treinador Robótico
O novo controlador foi avaliado com doze voluntários saudáveis realizando o mesmo exercício de elevação do ombro ao lado de um robô colaborativo. Em um conjunto de ensaios, os pesquisadores compararam modos únicos de ajuda — apenas indicações verbais, apenas forças físicas — com um controlador dual-modal básico que sempre os combinava de forma fixa. Em um segundo estudo, compararam essa configuração dual-modal fixa com seu Controlador de Orientação Robótica adaptativo. O desempenho foi medido por quão de perto os participantes seguiram o trajeto pretendido, quão suave era o movimento, quanto tempo levaram para completar e como os padrões de fala do robô mudaram.
O que os Experimentos Revelaram
Em todas as condições, combinar toque e fala geralmente superou o uso de qualquer uma das modalidades isoladamente, especialmente quando o canal adicional era o único ao qual a pessoa realmente prestava atenção. Em alguns casos, adicionar orientação física reduziu erros de posição em mais da metade e tornou os movimentos dramaticamente mais suaves e rápidos. O controlador adaptativo foi além, reduzindo erros de rastreamento em até 50%, melhorando a suavidade e diminuindo o tempo de conclusão em cerca de um quarto em comparação com a linha de base dual-modal fixa. Notavelmente, seus padrões de fala — com que frequência “falava” e quanto mudava de instruções para encorajamento — se aproximaram mais dos de terapeutas especialistas, e os participantes avaliaram a orientação adaptativa como mais natural e mais parecida com trabalhar com um treinador humano.

O que Isso Pode Significar para o Cotidiano
Para não especialistas, a conclusão é que é possível ensinar robôs a orientar pessoas de forma mais parecida com instrutores humanos habilidosos: usando uma mistura de toque suave e palavras oportunas que se adapta conforme você aprende. Embora este trabalho tenha sido demonstrado em um exercício de reabilitação, as ideias subjacentes podem se estender ao ensino de caligrafia, habilidades esportivas ou tarefas profissionais complexas. Ao perceber quão bem alguém está respondendo e ajustar a ajuda física e verbal em tempo real, robôs futuros podem se tornar não apenas máquinas precisas, mas parceiros pacientes e responsivos no aprendizado e na recuperação.
Citação: Tejwani, R., Payne, J., Velazquez, K. et al. Adaptive robot guidance through real-time compliance estimation and dual-modal control. Commun Eng 5, 81 (2026). https://doi.org/10.1038/s44172-026-00632-5
Palavras-chave: interação humano-robô, robótica de reabilitação, orientação adaptativa, treinamento robótico, controle multimodal