Clear Sky Science · sv
Adaptiv robotvägledning genom realtidsuppskattning av följsamhet och dualmodal styrning
Lära robotar att bli bättre hjälpare
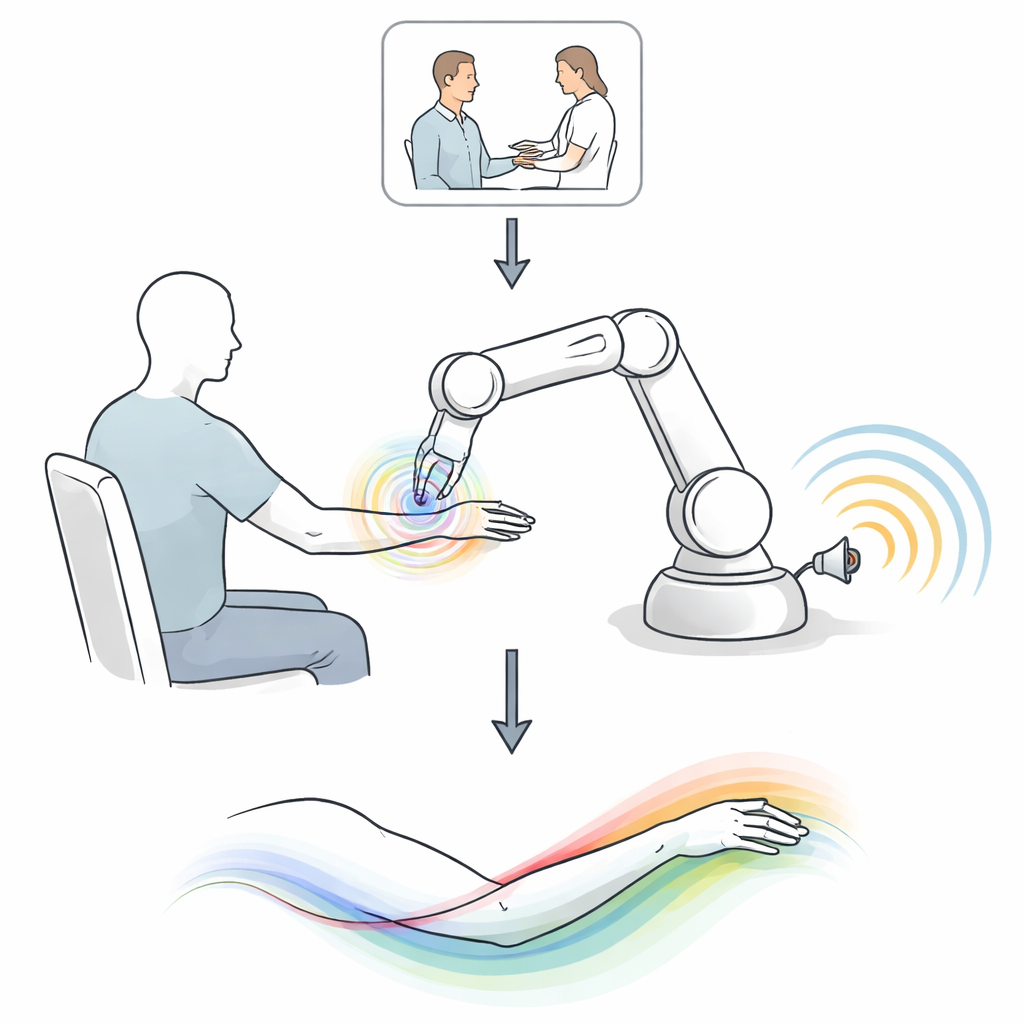
Föreställ dig att du lär dig ett nytt danssteg eller rehabiliterar en öm axel. En mänsklig instruktör trycker inte bara din arm i rätt position; hen ger också stegvisa tips och uppmuntran. Dagens robotar, däremot, brukar antingen föra din arm tyst eller tala utan att kunna röra vid dig. Denna artikel presenterar ett nytt sätt för robotar att förena beröring och tal, och att anpassa sig i realtid efter hur väl en person följer med, så att hjälpen känns säkrare, mer naturlig och mer effektiv.
Varför det spelar roll att blanda beröring och röst
Mänskliga lärare anpassar ständigt hur mycket de fysiskt vägleder jämfört med hur mycket de pratar. Om du ligger fel kan de bestämt flytta din arm och ge tydliga instruktioner. När du förbättras drar de sig undan, ger lättare vägledning och mer uppmuntran. Robotar har haft svårt att göra detta eftersom fysiska krafter och tal är helt olika slags signaler. Författarna ville ge en robot något liknande en instruktörs intuition: ett sätt att uppskatta hur villig och kapabel en person är att följa vägledning, och sedan avgöra när den ska trycka, när den ska tala och hur båda ska kombineras.
Hur den adaptiva robotcoachen fungerar
Teamet konstruerade en Robot Guidance Controller med tre huvuddelar. För det första uppskattar den kontinuerligt "följsamhet" — hur nära en person följer den önskade rörelsen — med enkla mått som gapet mellan var armen bör vara och var den faktiskt är, samt hur smidigt den rör sig. För det andra avgör ett optimeringssteg hur mycket av korrigeringen som ska ske via fysisk kraft jämfört med talade ledtrådar, och skiftar balansen när personens beteende förändras. För det tredje omvandlar en kraft-till-språk-modell robotens interna planer till korta, kontextanpassade fraser, såsom milda tips eller uppmuntran, baserat på mönster lärda från verkliga människoterapeuter. Tillsammans låter dessa element roboten samordna sina händer och sin "röst" i realtid.
Lära av expertterapeuter
För att förankra systemet i verkligt undervisningsbeteende studerade forskarna sjukgymnaster som arbetade med patienter i en enkel men kliniskt viktig uppgift: att lyfta armen från sidan upp över huvudet och tillbaka. I noggrant inspelade sessioner guidade terapeuterna ibland endast med tal, ibland endast med beröring och ibland med båda. Teamet fann tydliga mönster. När patienter motsatte sig eller hade svårt använde terapeuterna starkare fysisk assistans och mer frekvent, instruktivt tal. När patienterna följde närmare släppte terapeuterna greppet, talade mer sällan och gick från kommandon till uppmuntran. Dessa mönster inspirerade direkt hur roboten uppskattar följsamhet och bestämmer när den ska luta sig mot kraft, tal eller en kombination av båda.
Sätta robotcoachen på prov
Den nya kontrollern utvärderades med tolv friska försökspersoner som utförde samma axellyftningsövning tillsammans med en kollaborativ robot. I ett försök jämförde forskarna enkla hjälpformer — endast verbala ledtrådar, endast fysiska krafter — med en grundläggande dualmodalscontroller som alltid kombinerade dem på ett fast sätt. I en andra studie jämfördes den fasta dualmodalsuppsättningen med deras adaptiva Robot Guidance Controller. Prestanda mättes efter hur nära deltagarna följde den avsedda banan, hur smidiga deras rörelser var, hur lång tid de tog att slutföra övningen och hur robotens talmönster förändrades.
Vad experimenten visade
Över alla villkor slogs bruket av både beröring och tal i allmänhet ut att använda endera ensam, särskilt när den nyligen tillagda kanalen var den enda deltagaren faktiskt uppmärksammade. I vissa fall minskade fysisk vägledning positionsfel med mer än hälften och gjorde rörelserna dramatiskt smidigare och snabbare. Den adaptiva kontrollern gick längre, minskade följningsfel med upp till 50 %, förbättrade smidigheten och förkortade utförandetiden med ungefär en fjärdedel jämfört med den fasta dualmodalbaslinjen. Märkbart var att dess talmönster — hur ofta den "talade" och i vilken grad den gick från instruktioner till uppmuntran — matchade expertterapeuternas mer, och deltagarna bedömde den adaptiva vägledningen som mer naturlig och mer lik att arbeta med en mänsklig coach.

Vad detta kan betyda i vardagen
För icke-experter är slutsatsen att robotar kan läras vägleda människor mer som skickliga mänskliga instruktörer: genom en blandning av mjuk beröring och rättidig vägledning som anpassar sig medan du lär dig. Även om detta arbete demonstrerades i en rehabiliteringsövning kan de underliggande idéerna appliceras på undervisning i handstil, idrottsfärdigheter eller komplexa arbetsuppgifter. Genom att känna av hur väl någon svarar och justera fysisk och verbal hjälp i realtid kan framtida robotar bli inte bara precisa maskiner utan också tålmodiga, responsiva partners i lärande och återhämtning.
Citering: Tejwani, R., Payne, J., Velazquez, K. et al. Adaptive robot guidance through real-time compliance estimation and dual-modal control. Commun Eng 5, 81 (2026). https://doi.org/10.1038/s44172-026-00632-5
Nyckelord: människa-robot-interaktion, rehabiliteringsrobotik, adaptiv vägledning, robotcoachning, multimodal styrning