Clear Sky Science · tr
Gerçek zamanlı uyum tahmini ve çift modlu kontrol yoluyla uyarlanabilir robot rehberliği
Robotlara Daha İyi Yardımcı Olmayı Öğretmek
Yeni bir dans hareketi öğrenmeyi veya ağrılı bir omuzu rehabilite etmeyi hayal edin. İnsan bir eğitmen, kolunuzu sadece yerine itmez; aynı zamanda adım adım ipuçları ve cesaret verici sözler de sunar. Bugünün robotları ise genellikle ya sessizce hareket ettirir ya da dokunma yeteneği olmadan konuşur. Bu makale, robotların dokunma ve konuşmayı harmanlamasının yeni bir yolunu sunuyor; kişinin ne kadar iyi takip ettiğine gerçek zamanlı uyum sağlayarak yardımın daha güvenli, daha doğal ve daha etkili hissettirilmesini sağlıyor.
Dokunuş ve Sesin Birleştirilmesinin Önemi
İnsan öğretmenler, fiziksel olarak ne kadar rehberlik edecekleri ile ne kadar konuşacakları konusunda sürekli ayarlama yapar. Siz yanlış yapıyorsanız, kolunuzu daha kararlı şekilde hareket ettirip net talimatlar verebilirler. Geliştikçe geri çekilip daha hafif rehberlik ve daha çok teşvik sunarlar. Robotlar bunu yapmakta zorlandı çünkü fiziksel kuvvetler ve konuşma çok farklı türde sinyallerdir. Yazarlar, bir eğitmenin sezgisine benzer bir şey vermeyi amaçladılar: bir kişinin rehberliğe ne kadar istekli ve yetenekli olduğunu tahmin etme yolu ve ne zaman iteceğine, ne zaman konuşacağına ve her ikisini nasıl birleştireceğine karar verme mekanizması.
Uyarlanabilir Robot Koç Nasıl Çalışıyor
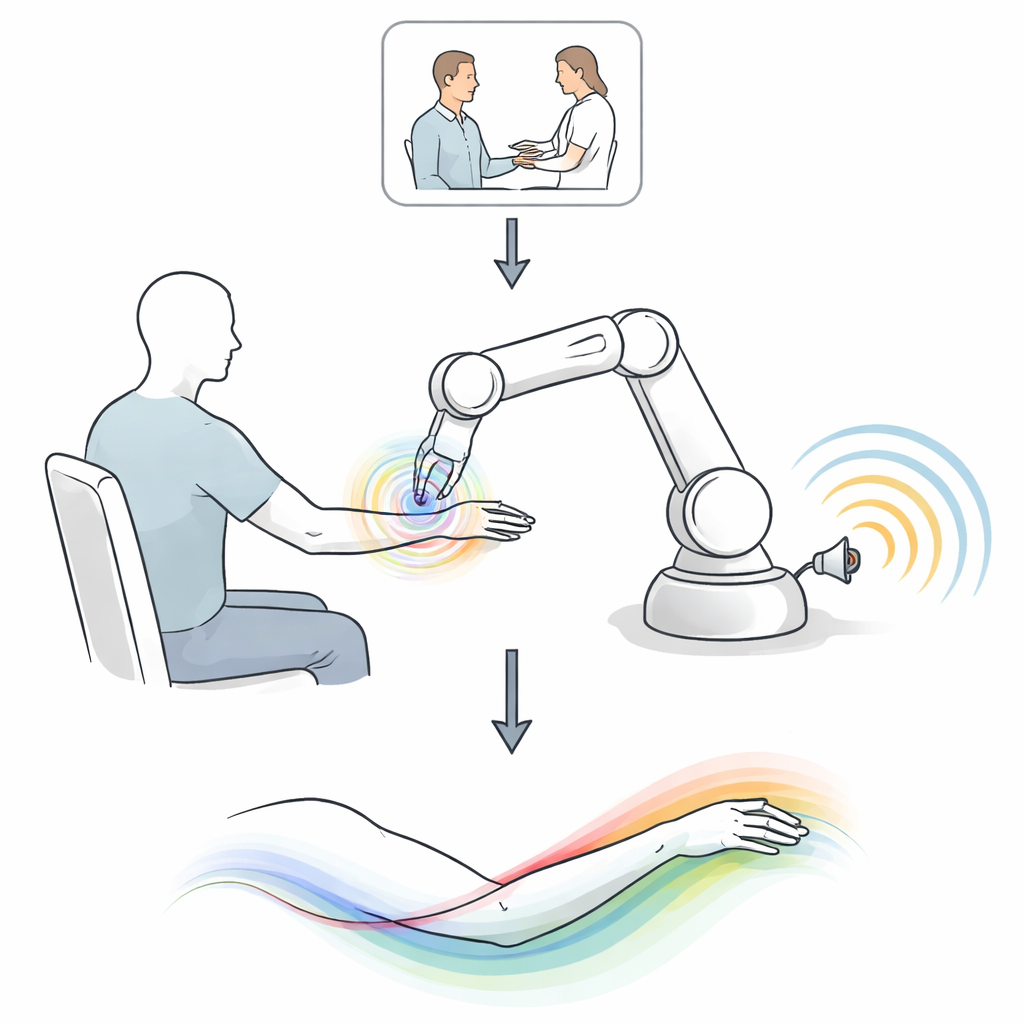
Ekip, üç ana parçadan oluşan bir Robot Rehberlik Denetleyicisi tasarladı. Birincisi, sürekli olarak “uyum”u — bir kişinin istenen hareketi ne kadar yakından takip ettiği — tahmin eder; bunun için kolun olması gereken yer ile bulunduğu yer arasındaki fark ve hareketin ne kadar düzgün olduğu gibi basit ölçümler kullanılır. İkincisi, bir optimizasyon adımı düzeltmenin ne kadarının fiziksel kuvvet yoluyla ne kadarının sözlü ipuçlarıyla sağlanacağını belirler; kişinin davranışı değiştikçe dengeyi kaydırır. Üçüncüsü, bir kuvvetten-dile model, robotun içsel planlarını kısa, bağlama uygun ifadelere dönüştürür; nazik ipuçları veya teşvikler gibi, gerçek insan terapistlerden öğrenilmiş örüntülere dayanır. Bu öğeler birlikte robotun elleri ile “sesi”ni gerçek zamanlı olarak koordine etmesini sağlar.
Uzman Terapistlerden Öğrenme
Sistemin gerçek dünyadaki öğretim davranışına dayandırılması için araştırmacılar, hastalarla çalışan fizyoterapistleri omzu yandan yukarı kaldırma ve geri indirme gibi basit ama klinik açıdan önemli bir görevde incelediler. Dikkatle kaydedilen oturumlarda terapistler bazen sadece sözle, bazen sadece dokunarak, bazen de her ikisiyle rehberlik ettiler. Ekip belirgin örüntüler buldu. Hastalar direndiğinde veya zorlandığında terapistler daha güçlü fiziksel yardım ve daha sık, öğretici konuşma kullandılar. Hastalar daha yakın takip ettikçe, kavrayışı gevşettiler, daha az konuştular ve emirlerden teşvike geçiş yaptılar. Bu örüntüler doğrudan robotun uyumu nasıl tahmin ettiğini ve ne zaman kuvvete, konuşmaya veya her ikisinin karışımına yaslanacağına karar verdiğini etkiledi.
Robot Koçu Teste Sokmak
Yeni denetleyici, aynı omuz kaldırma egzersizini bir işbirlikçi robotla birlikte yapan on iki sağlıklı gönüllüyle değerlendirildi. Bir dizi denemede araştırmacılar yalnızca sözlü ipuçları, yalnızca fiziksel kuvvetler gibi tek modlu yardımları temel olarak her zaman sabit bir şekilde birleştiren basit bir çift modlu denetleyici ile karşılaştırdılar. İkinci çalışmada ise bu sabit çift modlu düzen, uyarlanabilir Robot Rehberlik Denetleyicisi ile karşılaştırıldı. Performans, katılımcıların istenen yolu ne kadar yakından takip ettiği, hareketlerinin ne kadar düzgün olduğu, bitirme süreleri ve robotun konuşma örüntülerinin nasıl değiştiği ile ölçüldü.
Deneyler Ne Gösterdi
Koşullar genelinde, dokunuş ve konuşmayı birleştirmek genellikle yalnızca tek birini kullanmaktan daha iyi sonuç verdi; özellikle eklenen yeni kanal kişinin gerçekten dikkat ettiği tek kanal olduğunda. Bazı durumlarda fiziksel rehberlik eklemek konum hatalarını yarıdan fazla azalttı ve hareketleri belirgin şekilde daha düzgün ve daha hızlı yaptı. Uyarlanabilir denetleyici daha da ileri giderek takip hatalarını %50’ye kadar azalttı, düzgünselliği iyileştirdi ve tamamlama süresini sabit çift modlu baz hattına göre yaklaşık dörtte bir azalttı. Dikkate değer olarak, konuşma örüntüleri — ne sıklıkla “konuştuğu” ve talimatlardan teşvike ne kadar kaydığı — uzman terapistlere daha yakındı ve katılımcılar uyarlanabilir rehberliği daha doğal ve insan koçu ile çalışmaya benzer olarak değerlendirdiler.

Günlük Hayat İçin Anlamı
Uzman olmayanlar için çıkarım, robotlara insan eğitmenler gibi daha iyi rehberlik etmeyi öğretilebileceğidir: öğrenirken uyum sağlayan, nazik bir dokunuşla ve zamanında sözcüklerle karışık bir yaklaşım kullanmak. Bu çalışma bir rehabilitasyon egzersizinde gösterilmiş olsa da, altında yatan fikirler yazı yazma öğretiminden spor becerilerine veya karmaşık iş görevlerine kadar uzanabilir. Birinin ne kadar iyi yanıt verdiğini algılayıp fiziksel ve sözlü yardımı anında ayarlayarak gelecekteki robotlar sadece hassas makineler değil, öğrenme ve iyileşmede sabırlı, duyarlı ortaklar hâline gelebilir.
Atıf: Tejwani, R., Payne, J., Velazquez, K. et al. Adaptive robot guidance through real-time compliance estimation and dual-modal control. Commun Eng 5, 81 (2026). https://doi.org/10.1038/s44172-026-00632-5
Anahtar kelimeler: insan-robot etkileşimi, rehabilitasyon robotları, uyarlanabilir rehberlik, robotik koçluk, multimodal kontrol