Clear Sky Science · it
Guida robotica adattiva tramite stima della compliance in tempo reale e controllo dual-modale
Insegnare ai robot a essere migliori assistenti
Immagina di imparare un nuovo passo di danza o di fare la riabilitazione per una spalla dolorante. Un istruttore umano non si limita a spingere il tuo braccio nella posizione giusta; offre anche suggerimenti passo dopo passo e incoraggiamento. I robot di oggi, per contro, di solito o ti muovono in silenzio o parlano senza poter toccare. Questo articolo presenta un nuovo modo per far sì che i robot combinino tocco e parola, adattandosi in tempo reale a quanto bene una persona sta seguendo le istruzioni, così che l’aiuto risulti più sicuro, naturale ed efficace.
Perché è importante fondere tocco e voce
Gli insegnanti umani regolano costantemente quanto guidano fisicamente rispetto a quanto parlano. Se sei fuori traiettoria, possono muovere con decisione il tuo braccio e dare indicazioni chiare. Man mano che migliori, si fanno più leggeri, offrendo una guida meno vincolante e più incoraggiamento. I robot hanno faticato a fare lo stesso perché le forze fisiche e il linguaggio parlato sono segnali di natura molto diversa. Gli autori hanno voluto dotare un robot di qualcosa che assomigli all’intuizione di un istruttore: un modo per stimare quanto una persona sia disposta e in grado di seguire la guida, e quindi decidere quando spingere, quando parlare e come combinare i due.
Come funziona il coach robotico adattativo
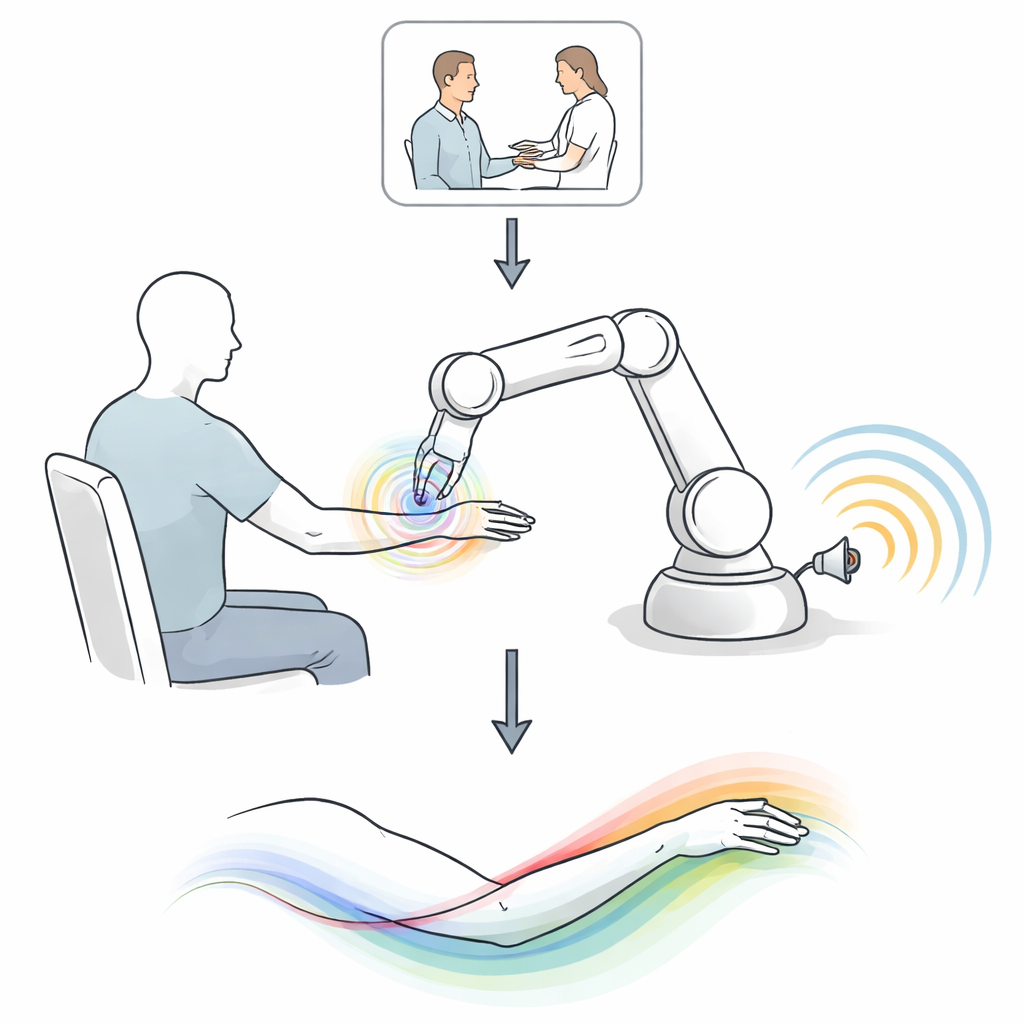
Il team ha progettato un Controllore di Guida Robotica con tre componenti principali. Primo, stima continuamente la «compliance» — quanto una persona segue la traiettoria desiderata — usando misure semplici come la distanza fra la posizione desiderata del braccio e quella reale, e la fluidità del movimento. Secondo, un passaggio di ottimizzazione decide quanta correzione debba avvenire tramite forza fisica rispetto a segnali verbali, spostando l’equilibrio man mano che il comportamento della persona cambia. Terzo, un modello forza-→-linguaggio converte i piani interni del robot in frasi brevi e contestualmente appropriate, come suggerimenti gentili o parole di incoraggiamento, basandosi su schemi appresi da terapisti umani reali. Insieme, questi elementi permettono al robot di coordinare le sue mani e la sua “voce” in tempo reale.
Apprendere dai terapisti esperti
Per ancorare il sistema al comportamento didattico del mondo reale, i ricercatori hanno studiato fisioterapisti che lavoravano con pazienti su un compito semplice ma clinicamente importante: sollevare il braccio dal fianco sopra la testa e riportarlo indietro. In sessioni registrate con cura, i terapisti a volte guidavano solo a parole, a volte solo con il tocco e altre volte con entrambi. Il team ha riscontrato schemi chiari. Quando i pazienti resistevano o faticavano, i terapisti usavano un’assistenza fisica più forte e discorsi istruttivi più frequenti. Quando i pazienti seguivano più da vicino, i terapisti allentavano la presa, parlavano meno spesso e passavano da comandi a incoraggiamenti. Questi schemi hanno ispirato direttamente il modo in cui il robot stima la compliance e decide quando affidarsi alla forza, al linguaggio o a una combinazione di entrambi.
Mettere alla prova il coach robotico
Il nuovo controllore è stato valutato con dodici volontari sani che eseguivano lo stesso esercizio di sollevamento della spalla insieme a un robot collaborativo. In una serie di prove, i ricercatori hanno confrontato modalità singole di aiuto — solo segnali verbali, solo forze fisiche — con un controllore dual-modale di base che le combinava sempre in modo fisso. In un secondo studio, hanno confrontato quel setup dual-modale fisso con il loro Controllore di Guida Robotica adattativo. Le prestazioni sono state misurate in base a quanto i partecipanti seguivano la traiettoria prevista, la fluidità del movimento, il tempo impiegato per completare il compito e come cambiavano i modelli di parola del robot.
Cosa hanno rivelato gli esperimenti
In tutte le condizioni, combinare tocco e parola generalmente ha superato l’uso di uno solo dei due canali, specialmente quando il nuovo canale era l’unico a cui la persona prestava effettivamente attenzione. In alcuni casi, aggiungere guida fisica ha ridotto l’errore di posizione di oltre la metà e ha reso i movimenti notevolmente più fluidi e veloci. Il controllore adattativo è andato oltre, riducendo gli errori di tracciamento fino al 50%, migliorando la fluidità e riducendo il tempo di completamento di circa un quarto rispetto al baseline dual-modale fisso. È degno di nota che i suoi schemi verbali — quanto spesso «parlava» e quanto passava da istruzioni a incoraggiamenti — corrispondevano più strettamente a quelli dei terapisti esperti, e i partecipanti hanno valutato la guida adattativa come più naturale e più simile a lavorare con un coach umano.

Cosa potrebbe significare per la vita quotidiana
Per i non esperti, la conclusione è che i robot possono essere addestrati a guidare le persone più come istruttori umani abili: usando una miscela di tocco gentile e parole tempestive che si adattano mentre impari. Sebbene questo lavoro sia stato dimostrato in un esercizio di riabilitazione, le idee di base potrebbero estendersi all’insegnamento della calligrafia, di abilità sportive o di compiti professionali complessi. Percependo quanto bene qualcuno risponde e regolando di conseguenza l’aiuto fisico e verbale, i robot futuri potrebbero diventare non solo macchine precise, ma partner pazienti e reattivi nell’apprendimento e nel recupero.
Citazione: Tejwani, R., Payne, J., Velazquez, K. et al. Adaptive robot guidance through real-time compliance estimation and dual-modal control. Commun Eng 5, 81 (2026). https://doi.org/10.1038/s44172-026-00632-5
Parole chiave: interazione uomo-robot, robotica per la riabilitazione, guida adattativa, coaching robotico, controllo multimodale