Clear Sky Science · zh
用于实时检测无人机群中北斗信号篡改的三流多模型架构
让无人机群保持可靠为何重要
想象一支送货无人机或救援机器人舰队在繁忙城市上空紧密编队飞行。它们依赖卫星信号来确定自身位置。如果恶意者悄悄伪造这些信号,整群无人机可能偏离航线、发生碰撞或进入受限空域。本文探讨如何实时发现并对抗此类欺骗,使大量无人飞行器即便在“天空在欺骗它们”的情况下仍能安全完成任务。
当今无人机导航的隐性弱点
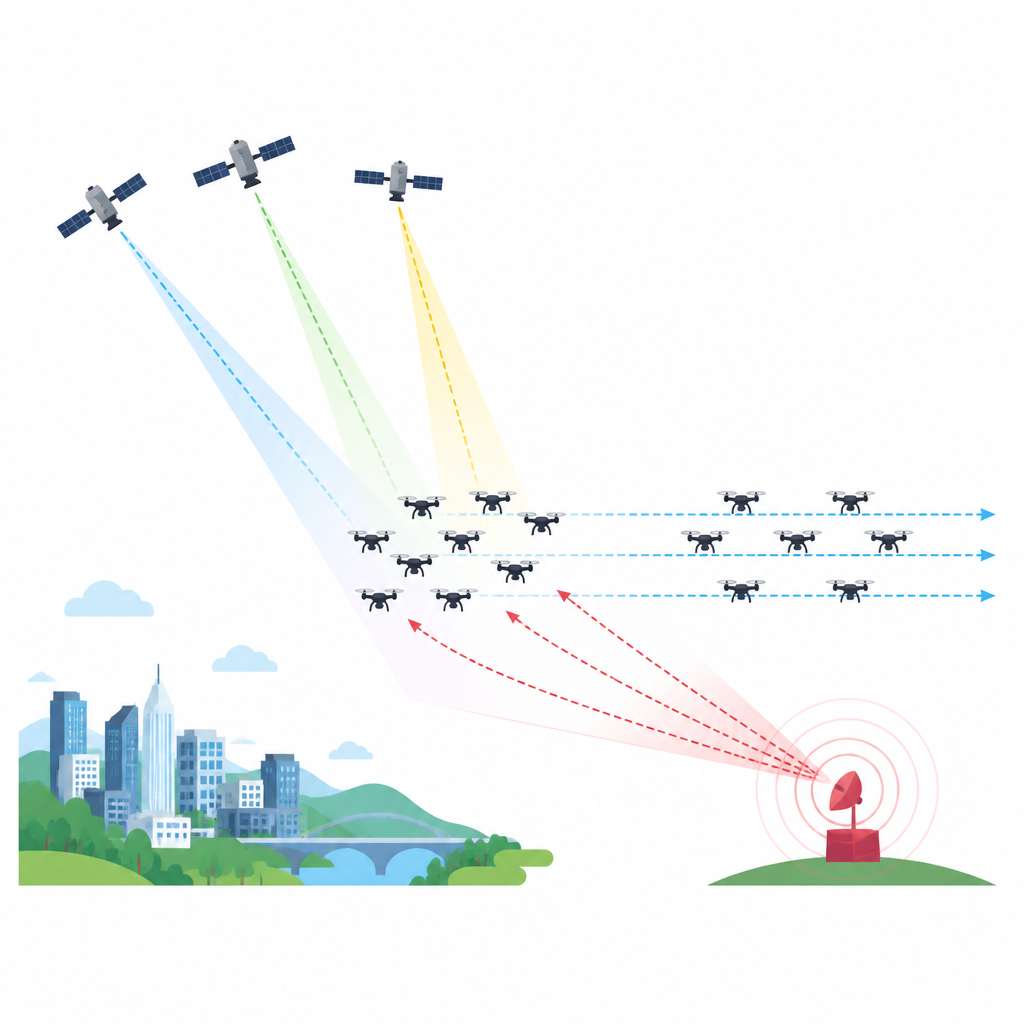
大多数现代无人机使用全球导航卫星系统,例如中国的北斗,来跟踪位置和时间。消费级无人机通常配备简单的单频接收机,缺乏额外的安全措施。这使它们成为欺骗攻击的容易目标:攻击者广播的伪卫星信号会压过真实信号。在群体飞行中,危险放大:如果多架无人机接受相同的虚假位置信息,它们精心编排的间距就会失效,增加碰撞和任务失败的风险,尤其是在充满反射和信号遮挡的城市“峡谷”环境中。
欺骗群体的方法多种多样
作者绘制了一系列可能误导无人机群的攻击手法。一台强功率地面发射器可以用伪造信号覆盖一片区域,将整个编队拉出其地理围栏区域。安装在厢型车上的移动欺骗器可以缓慢拖拽编队航线,然后突然改变方向。一架被攻破的队内无人机可以充当局部欺骗者,诱导附近邻机相互碰撞。其他策略包括回放真实信号但有延迟、逐步偏置频率或将干扰与欺骗结合,使接收机先丢失锁定,然后在假信号上重新获取。综合这些情形可见,当数十架飞行器需要实时协调时,单机防护远远不够。
多层次的“感知与共享”防御
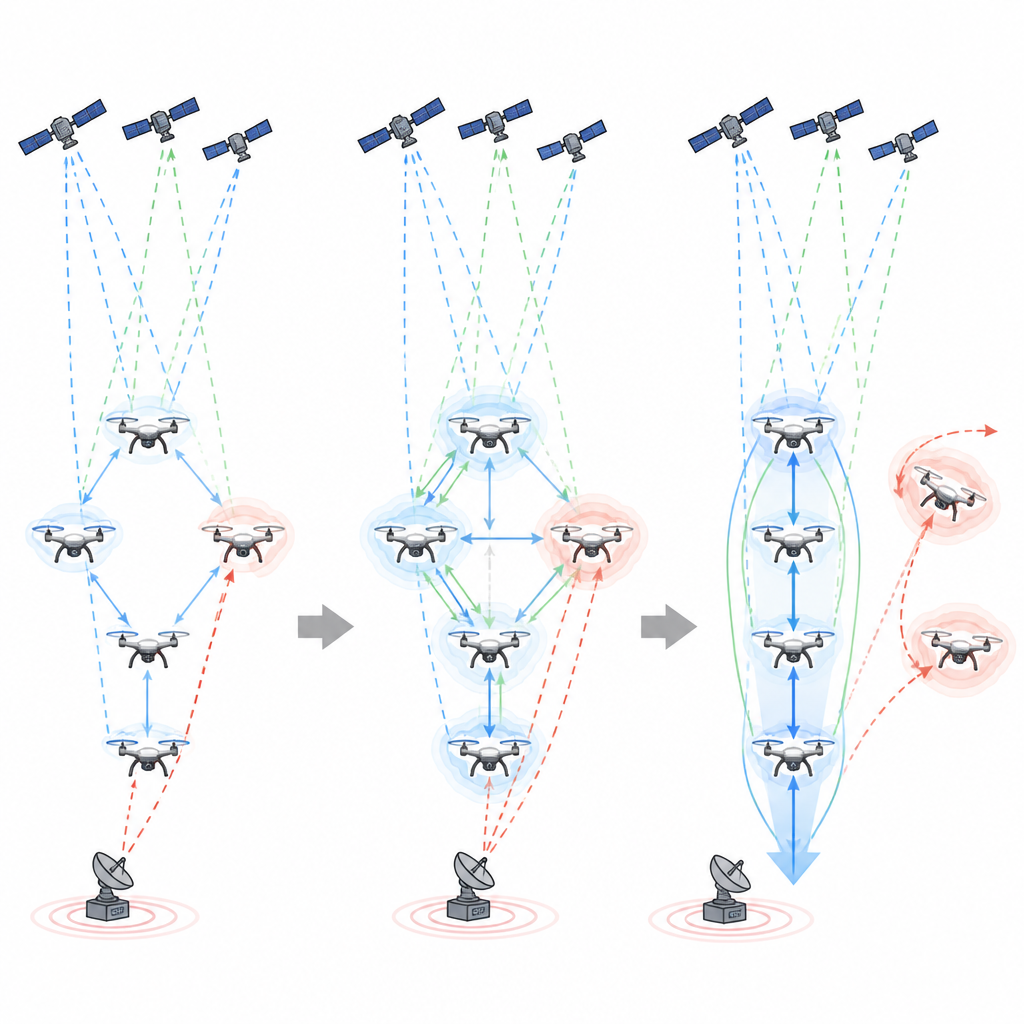
为应对这些威胁,研究提出了一种混合检测系统,同时监测单机行为与群体模式。系统核心是每架无人机运行一个数学跟踪器,基于历史运动和机载传感器预测应有轨迹,并将其与北斗给出的数据比对。异常差异会引发怀疑。同时,三类学习模型分别寻找线索:一类关注卫星信号本身的模式,另一类追踪运动随时间的演变,第三类检查编队中无人机之间的相互关系。它们的输出被合并为单一风险评分。当情况不明时,一种专门的语言模型(在无人机遥测日志上训练)提供额外的“合理性检查”,帮助将敌对干扰与反射或阵风等正常异常区分开来。
教会编队协同应对
检测只是故事的一半;编队还必须做出明智反应。在该框架中,每架无人机定期与周围同伴共享其位置、运动和欺骗风险的紧凑摘要。随后每架无人机形成对哪些邻机可信的独立判断,对看起来可疑或通信不可靠的邻机赋予更低权重。这种基于信任加权的共识决定了每台飞行器如何调整速度与方向。被评估为安全的无人机有助于将编队拉回对齐,而可疑无人机则被有效降级、推离或视为移动障碍。系统还可将“领队”角色重新分配给具有低欺骗风险和良好通信链路的无人机,从而在无中央控制器的情况下维持有序编队。
在虚拟天空中测试该想法
由于在现实中广播伪造卫星信号受严格监管,团队构建了一个细致的软件模拟器。它重现了北斗的卫星几何、真实信号噪声、城市反射以及各种欺骗和干扰行为,包括恶意无人机和多发射器协同情况。每架虚拟无人机配备模拟卫星接收机和运动传感器,并运行其自身的检测与控制算法副本。在覆盖不同编队形状、飞行任务和威胁类型的数十次测试中,该系统在约97%的案例中正确标记出欺骗,误报很少,平均反应时间低于三秒。即使在复杂攻击中,编队航线通常偏离预定路径不足五米,几乎所有任务均成功完成。
这对日常无人机使用意味着什么
通俗地说,这项工作表明,协作无人机网络可以学会察觉其“位置感”何时被篡改、相互交流相关信息并即时调整编队以保持安全与有效。该方法兼容常用的卫星与运动传感器,并设计为分布式运行,因此可适配用于配送、检查或应急响应的实际舰队。尽管当前结果来自仿真并仍依赖相对强大的机载计算,但它为在城市及其他导航不可靠的对抗环境中提升无人机群的抗扰能力铺平了道路。
引用: Tariq, U., Ahanger, T.A. & Shaukat, K. Tri-stream multi-model architecture for real-time detection of BeiDou signal manipulation in UAV swarms. Sci Rep 16, 15802 (2026). https://doi.org/10.1038/s41598-026-46655-y
关键词: 无人机群, GNSS 欺骗, 北斗安全, 无人机导航, 网络物理攻击