Clear Sky Science · de
Tri-Stream-Multi-Modell-Architektur zur Echtzeit-Erkennung von BeiDou-Signalmanipulation in UAV-Schwärmen
Warum es wichtig ist, Drohnenschwärme zuverlässig zu halten
Stellen Sie sich eine Flotte von Lieferdrohnen oder Rettungsrobotern vor, die in enger Formation über einer belebten Stadt fliegen. Sie sind auf Satellitensignale angewiesen, um ihre Position zu bestimmen. Wenn ein böswilliger Akteur diese Signale unbemerkt fälscht, kann der gesamte Schwarm vom Kurs abkommen, zusammenstoßen oder in gesperrten Luftraum eindringen. Dieses Papier untersucht, wie sich solche Täuschungen in Echtzeit erkennen und abwehren lassen, damit große Gruppen unbemannter Luftfahrzeuge sicher und missionsfähig bleiben, selbst wenn der Himmel lügt.
Die verborgene Schwäche heutiger Drohnenavigation
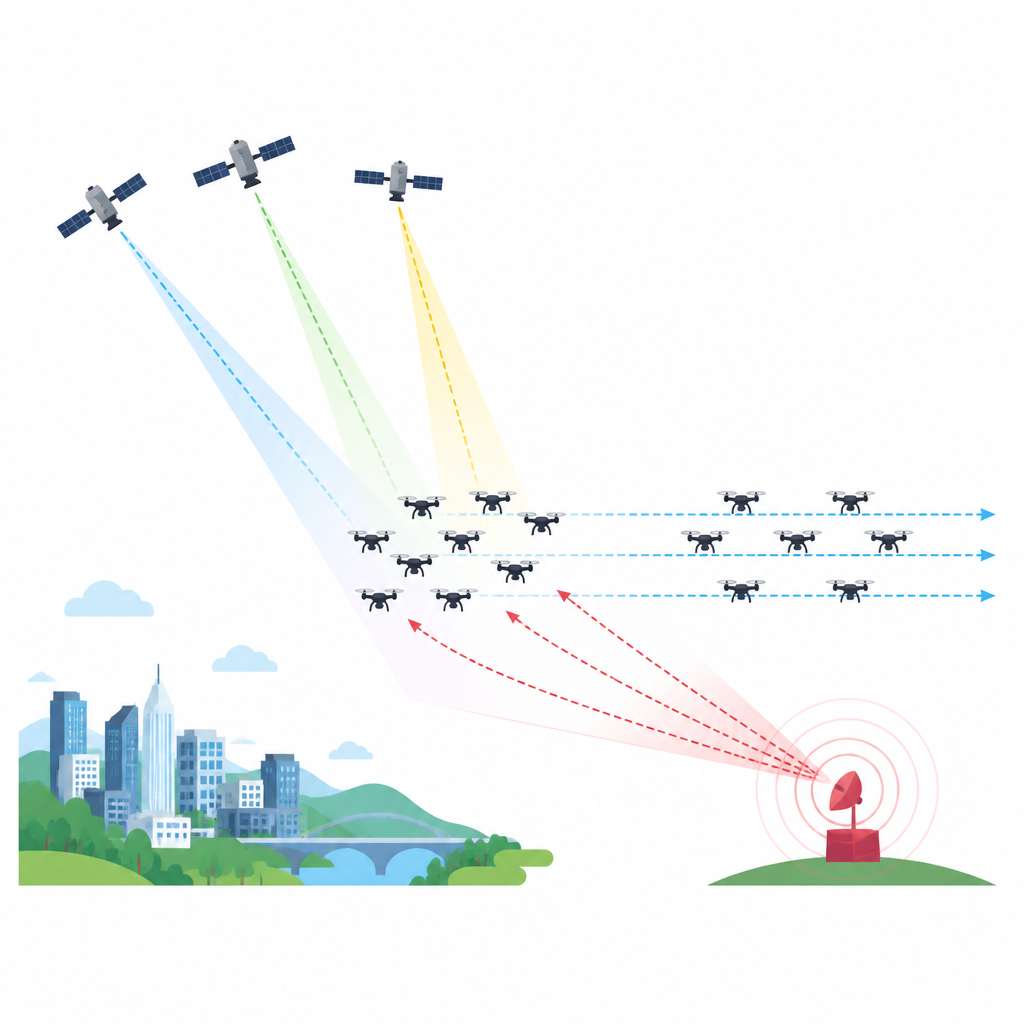
Die meisten modernen Drohnen nutzen globale Navigationssatellitensysteme wie Chinas BeiDou, um Position und Zeit zu bestimmen. Konsumenten-Drohnen haben typischerweise einfache Einkanalempfänger ohne zusätzliche Sicherheitsfunktionen. Das macht sie zu leichten Zielen für Spoofing, bei dem Angreifer gefälschte Satellitensignale aussenden, die die echten überlagern. Bei Schwarmflügen vervielfacht sich die Gefahr: Akzeptieren viele Drohnen dieselben falschen Positionsangaben, bricht die ausgefeilte Abstandssteuerung zusammen, wodurch das Risiko von Kollisionen und Missionsfehlern steigt — besonders in urbanen „Schluchten“ voller Reflexionen und Signalabschattungen.
Viele Wege, einen Schwarm zu täuschen
Die Autoren kartieren eine Vielzahl von Angriffsarten, die einen Schwarm in die Irre führen können. Ein leistungsstarker Boden-Sender kann ein Gebiet mit gefälschten Signalen fluten und die gesamte Gruppe aus einer geofenced Zone ziehen. Ein beweglicher Spoofer auf einem Lieferwagen kann den Flugpfad des Schwarms langsam abziehen, bevor er ihn abrupt verschiebt. Eine kompromittierte Drohne innerhalb der Formation kann als lokaler Täuscher wirken und nahe Nachbarn gegeneinander steuern. Weitere Taktiken spielen echte Signale mit Verzögerung ab, verzerren schrittweise Frequenzen oder kombinieren Jamming und Spoofing, sodass Empfänger zunächst den Satellitenkontakt verlieren und anschließend falsche Signale erneut einklinken. Zusammengenommen zeigen diese Szenarien, dass einfache Einzel-Drohnen-Abwehrmaßnahmen nicht ausreichen, wenn Dutzende Fahrzeuge in Echtzeit koordiniert werden müssen.
Eine mehrschichtige „Erkennen und Teilen“-Verteidigung
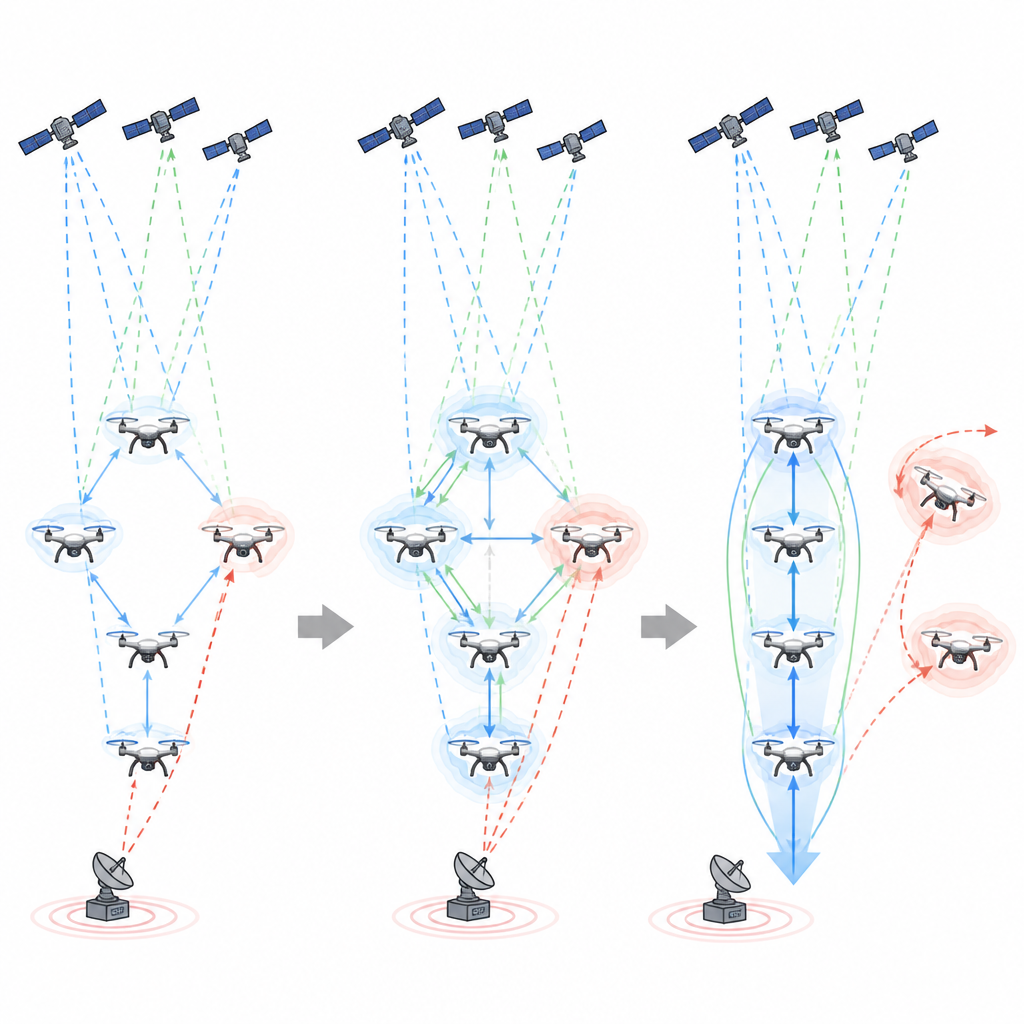
Um diesen Bedrohungen zu begegnen, schlägt die Studie ein hybrides Detektionssystem vor, das gleichzeitig individuelles Drohnenverhalten und Schwarmmuster beobachtet. Im Kern betreibt jede Drohne einen mathematischen Tracker, der basierend auf vergangener Bewegung und Bordsensorik vorhersagt, wie sie sich bewegen sollte, und vergleicht dies mit den BeiDou-Angaben. Ungewöhnliche Abweichungen erregen Verdacht. Daneben suchen drei Arten von Lernmodellen nach Hinweisen: eines fokussiert sich auf Muster in den Satellitensignalen selbst, ein anderes verfolgt die zeitliche Entwicklung der Bewegung, und ein drittes untersucht die Wechselbeziehungen der Drohnen in der Formation. Deren Ausgaben werden zu einem einzigen Risiko-Score kombiniert. Ein spezialisiertes Sprachmodell, trainiert mit Drohnen-Telemetrie-Logs, liefert eine zusätzliche „Plausibarkeitsprüfung“, wenn die Lage unklar ist, und hilft, feindliche Störungen von normalen Effekten wie Reflexionen oder Windböen zu unterscheiden.
Den Schwarm beibringen, gemeinsam zu reagieren
Erkennung ist nur die halbe Miete; der Schwarm muss auch sinnvoll reagieren. In diesem Rahmen teilt jede Drohne regelmäßig kompakte Zusammenfassungen ihrer Position, Bewegung und Spoofing-Risiken mit benachbarten Peers. Jede Drohne bildet dann ihr eigenes Bild davon, welche Nachbarn vertrauenswürdig sind, und gewichtet verdächtig wirkende oder unzuverlässig kommunizierende Einheiten herunter. Dieser vertrauensgewichtete Konsens bestimmt, wie jedes Fahrzeug seine Geschwindigkeit und Richtung anpasst. Als sicher eingestufte Drohnen helfen, die Formation wieder auszurichten, während verdächtige Drohnen effektiv herabgestuft, weggedrängt oder als bewegliche Hindernisse behandelt werden. Das System kann außerdem Führungsrollen an Drohnen mit niedrigem Spoofing-Risiko und guten Kommunikationsverbindungen neu vergeben, wodurch eine geordnete Formation ohne zentrale Steuerung erhalten bleibt.
Die Idee in einem virtuellen Himmel testen
Da das Aussenden gefälschter Satellitensignale in der realen Welt stark reguliert ist, entwickelte das Team stattdessen einen detaillierten Software-Simulator. Er bildet BeiDou-Geometrie, realistische Signalstörungen, urbane Reflexionen und ein breites Spektrum an Spoofing- und Jamming-Verhalten nach, einschließlich bösartiger Drohnen und mehrerer koordinierter Sender. Jede virtuelle Drohne trägt einen simulierten Satellitenempfänger und Bewegungssensoren und führt eigene Kopien der Erkennungs- und Steuerungsalgorithmen aus. In Dutzenden von Testläufen mit verschiedenen Schwarmformen, Flugmissionen und Bedrohungstypen erkannte das System Spoofing in etwa 97 Prozent der Fälle richtig, mit sehr wenigen Fehlalarmen und einer mittleren Reaktionszeit von unter drei Sekunden. Selbst bei komplexen Angriffen wich der Flugpfad typischerweise um weniger als fünf Meter vom geplanten Kurs ab, und nahezu alle Missionen wurden erfolgreich abgeschlossen.
Was das für den Alltagseinsatz von Drohnen bedeutet
Einfach gesagt zeigt diese Arbeit, dass vernetzte, kooperierende Drohnen lernen können, wenn mit ihrem „Orientierungsgefühl“ manipuliert wird, miteinander darüber kommunizieren und ihre Formation unterwegs anpassen, um sicher und einsatzfähig zu bleiben. Der Ansatz funktioniert mit Standard-Satelliten- und Bewegungssensoren und ist für verteilten Betrieb ausgelegt, sodass er an reale Flotten für Lieferungen, Inspektionen oder Notfalleinsätze angepasst werden könnte. Zwar basieren die aktuellen Ergebnisse auf Simulationen und setzen relativ leistungsfähige Bordrechner voraus, doch zeigen sie einen Weg, Drohnenschwärme in Städten und anderen umkämpften Umgebungen deutlich resilienter zu machen, wo verlässliche Navigation nicht selbstverständlich ist.
Zitation: Tariq, U., Ahanger, T.A. & Shaukat, K. Tri-stream multi-model architecture for real-time detection of BeiDou signal manipulation in UAV swarms. Sci Rep 16, 15802 (2026). https://doi.org/10.1038/s41598-026-46655-y
Schlüsselwörter: UAV-Schwärme, GNSS-Spoofing, BeiDou-Sicherheit, Drohnennavigation, Cyber-physische Angriffe