Clear Sky Science · es
Arquitectura multimodal de tres flujos para la detección en tiempo real de la manipulación de señales BeiDou en enjambres de UAV
Por qué importa mantener la integridad de los enjambres de drones
Imagine una flota de drones de reparto o robots de rescate volando en formación apretada sobre una ciudad concurrida. Dependen de señales satelitales para saber dónde están. Si un actor malintencionado falsifica esas señales de forma sigilosa, todo el enjambre puede desviarse, chocar o entrar en espacio aéreo restringido. Este artículo explora cómo detectar y contrarrestar ese tipo de engaños en tiempo real, de modo que grandes grupos de vehículos aéreos no tripulados puedan permanecer seguros y cumplir su misión incluso cuando el cielo les miente.
La debilidad oculta en la navegación actual de drones
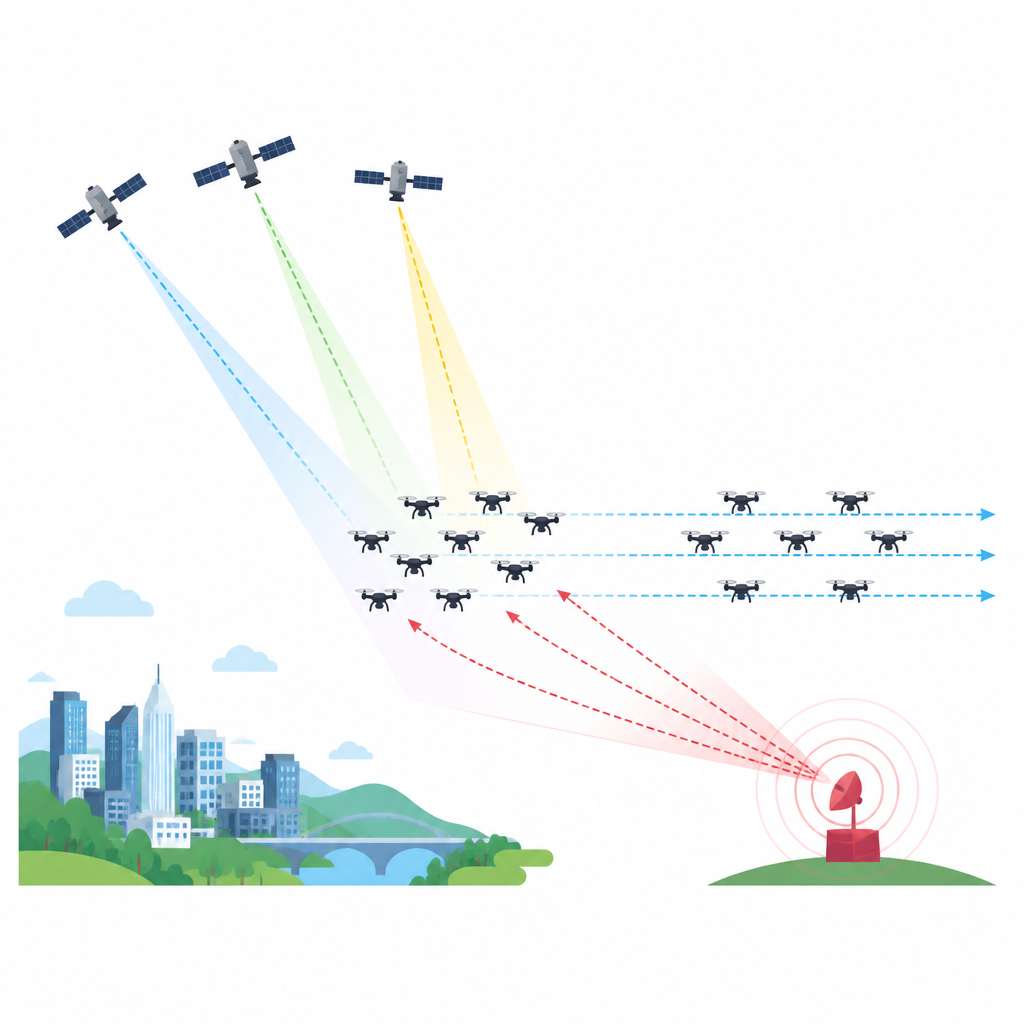
La mayoría de los drones modernos usan sistemas globales de navegación por satélite, como el chino BeiDou, para rastrear su posición y tiempo. Los drones de consumo suelen llevar receptores simples de frecuencia única sin seguridad añadida. Eso los convierte en blancos fáciles para la suplantación (spoofing), donde atacantes emiten señales satelitales falsas que eclipsan a las reales. En los vuelos en enjambre, el peligro se multiplica: si muchos drones aceptan las mismas falsedades sobre su posición, su separación cuidadosamente coreografiada se rompe, aumentando el riesgo de colisiones y fallos de misión, sobre todo en entornos urbanos tipo “cañón” llenos de reflexiones y obstrucciones de señal.
Muchas maneras de engañar a un enjambre
Los autores trazan un catálogo amplio de estilos de ataque que pueden engañar a un enjambre. Un transmisor potente en tierra puede inundar un área con señales contrahechas, arrastrando a todo el grupo fuera de su región geovallada. Un suplantador móvil montado en una furgoneta puede desviar lentamente la trayectoria del enjambre antes de desplazarla de golpe. Un dron comprometido dentro de la formación puede actuar como un engañador local, empujando a los vecinos cercanos unos contra otros. Otras tácticas reemiten señales reales con un retraso, sesgan gradualmente las frecuencias o combinan interferencia (jamming) y suplantación para que los receptores primero pierdan bloqueo y luego se enganchen a señales falsas. En conjunto, estos escenarios demuestran que las defensas simples de un solo dron no bastan cuando docenas de vehículos deben coordinarse en tiempo real.
Una defensa multinivel de “detectar y compartir”
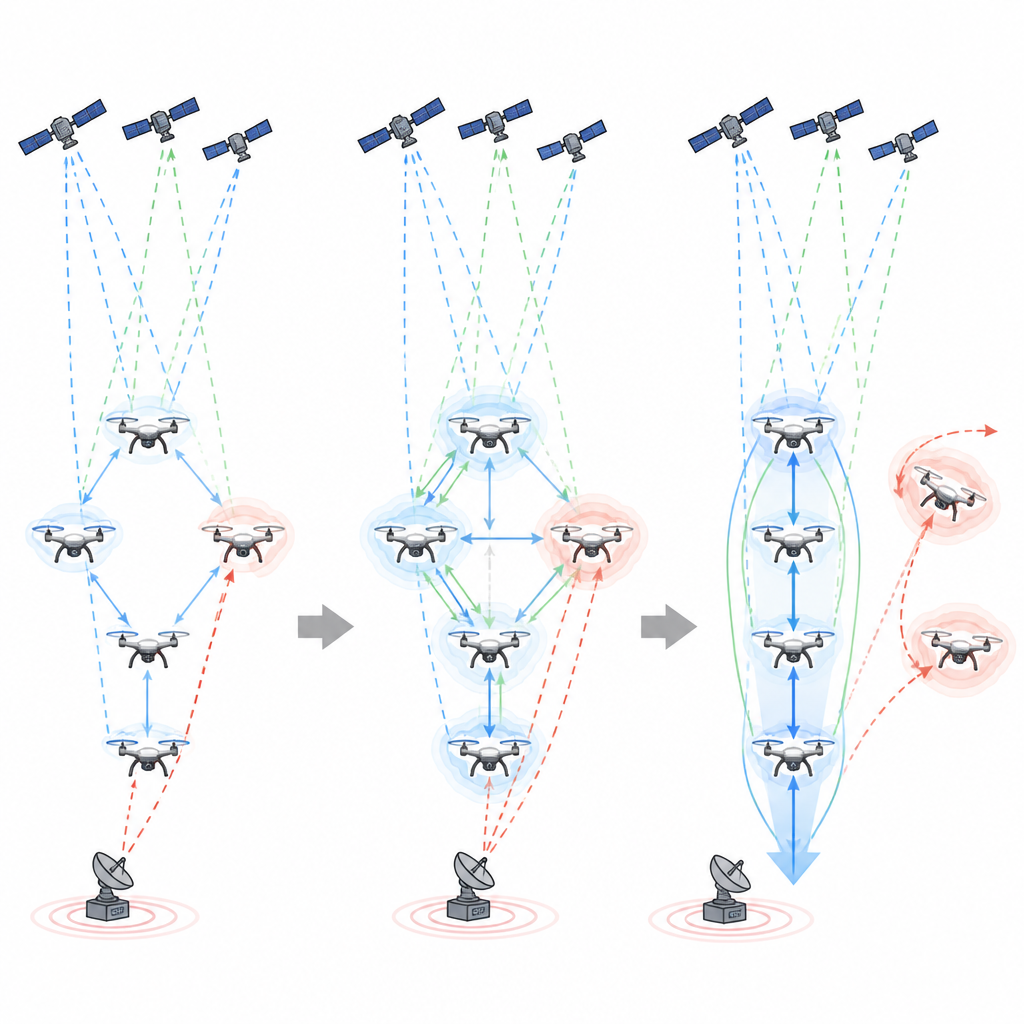
Para contrarrestar estas amenazas, el estudio propone un sistema híbrido de detección que vigila al mismo tiempo el comportamiento individual de cada dron y los patrones del enjambre. En su núcleo, cada dron ejecuta un rastreador matemático que predice cómo debería moverse según el movimiento pasado y los sensores a bordo, y luego compara eso con lo que indica BeiDou. Diferencias inusuales despiertan sospechas. Junto a esto, tres tipos de modelos de aprendizaje buscan pistas: uno se centra en patrones dentro de las señales satelitales, otro sigue cómo evoluciona el movimiento en el tiempo y un tercero examina las relaciones entre drones en la formación. Sus salidas se combinan en una única puntuación de riesgo. Un modelo de lenguaje especializado, entrenado con registros de telemetría de drones, aporta una comprobación adicional cuando la situación es poco clara, ayudando a distinguir interferencia hostil de anomalías normales como reflexiones o ráfagas de viento.
Enseñar al enjambre a reaccionar de forma conjunta
La detección es solo la mitad de la historia; el enjambre también debe responder con criterio. En este marco, cada dron comparte periódicamente resúmenes compactos de su posición, movimiento y riesgo de suplantación con sus pares cercanos. Cada dron forma entonces su propia visión sobre qué vecinos son confiables, dando menos peso a aquellos que parecen sospechosos o comunican de forma poco fiable. Este consenso ponderado por confianza modela cómo ajusta cada vehículo su velocidad y dirección. Los drones que parecen seguros ayudan a realinear la formación, mientras que los drones sospechosos son efectivamente relegados, empujados fuera o tratados como obstáculos móviles. El sistema también puede reasignar roles de “líder” a drones con bajo riesgo de suplantación y buenos enlaces de comunicación, preservando una formación ordenada sin controlador central.
Probar la idea en un cielo virtual
Puesto que emitir señales satelitales falsas en el mundo real está fuertemente regulado, el equipo construyó en su lugar un simulador de software detallado. Recrea la geometría de BeiDou, ruido realista de señal, reflexiones urbanas y una amplia gama de comportamientos de suplantación e interferencia, incluidos drones rebeldes y múltiples transmisores coordinados. Cada dron virtual lleva un receptor satelital simulado y sensores de movimiento, y ejecuta su propia copia de los algoritmos de detección y control. En decenas de ejecuciones de prueba que abarcaron distintas formas del enjambre, misiones de vuelo y tipos de amenaza, el sistema detectó correctamente la suplantación en aproximadamente el 97 por ciento de los casos, con muy pocas falsas alarmas y un tiempo medio de reacción inferior a tres segundos. Incluso durante ataques complejos, la trayectoria del enjambre normalmente se desvió menos de cinco metros de su curso previsto, y casi todas las misiones se completaron con éxito.
Qué significa esto para el uso cotidiano de drones
En términos sencillos, este trabajo demuestra que redes de drones cooperativos pueden aprender a notar cuando su “sentido del lugar” está siendo manipulado, comunicarse entre sí al respecto y ajustar la formación sobre la marcha para mantenerse seguras y útiles. El enfoque funciona con sensores satelitales y de movimiento estándar y está diseñado para ejecutarse de forma distribuida, por lo que podría adaptarse a flotas reales usadas en entregas, inspecciones o respuesta a emergencias. Si bien los resultados actuales proceden de simulación y todavía dependen de una computación a bordo relativamente potente, trazan un camino hacia enjambres de drones mucho más resilientes en ciudades y otros entornos disputados donde no se puede dar por sentada una navegación de confianza.
Cita: Tariq, U., Ahanger, T.A. & Shaukat, K. Tri-stream multi-model architecture for real-time detection of BeiDou signal manipulation in UAV swarms. Sci Rep 16, 15802 (2026). https://doi.org/10.1038/s41598-026-46655-y
Palabras clave: enjambres de UAV, suplantación de GNSS, seguridad BeiDou, navegación de drones, ataques ciberfísicos