Clear Sky Science · ja
UAV群におけるリアルタイムの北斗信号改ざん検知のための三系統マルチモデルアーキテクチャ
ドローン群の誠実性を保つことが重要な理由
配送ドローンや救助ロボットの編隊が混雑した都市上空をきれいに飛んでいる様子を想像してみてください。これらは自分の位置を知るために衛星信号に依存しています。もし悪意ある者が密かにその信号を偽造すれば、編隊全体が進路を外れたり衝突したり、立ち入り禁止の空域に侵入したりします。本稿はそのような欺瞞をリアルタイムで検出し対処する方法を探り、空が嘘をついている状況でも大規模な無人機群が安全かつ任務を遂行できるようにすることを目的としています。
現在のドローン航法に潜む弱点
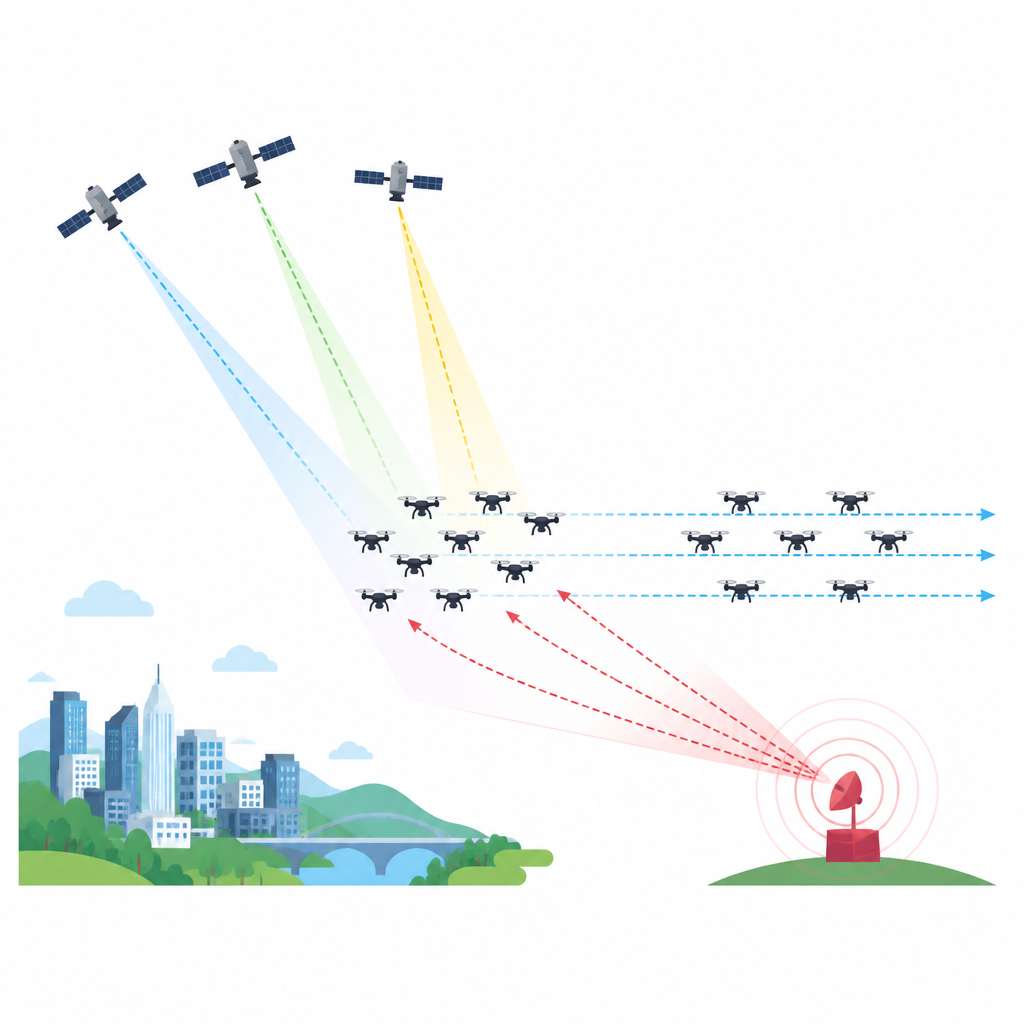
ほとんどの現代ドローンは、中国の北斗のような全球航法衛星システムにより位置と時刻を把握しています。市販のドローンは通常、付加的なセキュリティを持たない単一周波数の受信機を搭載しており、これがスプーフィングの格好の標的となります。攻撃者が偽の衛星信号を送信して正しい信号を上回ると、受信機は騙されます。編隊飛行ではこの危険が増幅します:多くのドローンが同じ誤った位置情報を受け入れれば、綿密に調整された間隔は崩れ、反射や信号遮蔽の多い都市の“キャニオン”環境では衝突や任務失敗のリスクが高まります。
編隊を欺く多様な手口
論文は編隊を誤誘導し得る多様な攻撃手法を体系的に示しています。強力な地上送信機が偽信号で領域を洪水させ、編隊全体をジオフェンス外へ引き出すことができます。バンに搭載された移動式スプーファーは群の航路を徐々にずらし、ある時点で急変させることができます。編隊内に侵入した乗っ取りドローンは局所的な欺瞞者となり、近傍の機体を互いに衝突させるよう誘導する可能性があります。その他の手口としては、実信号を遅延再生する、周波数に徐々にバイアスをかける、ジャミングとスプーフィングを組み合わせてまずロックを失わせ、その後偽信号で再取得させるなどがあります。これらのシナリオは、数十機がリアルタイムで協調する状況では単一機の防御では不十分であることを示しています。
多層の「感知と共有」防御
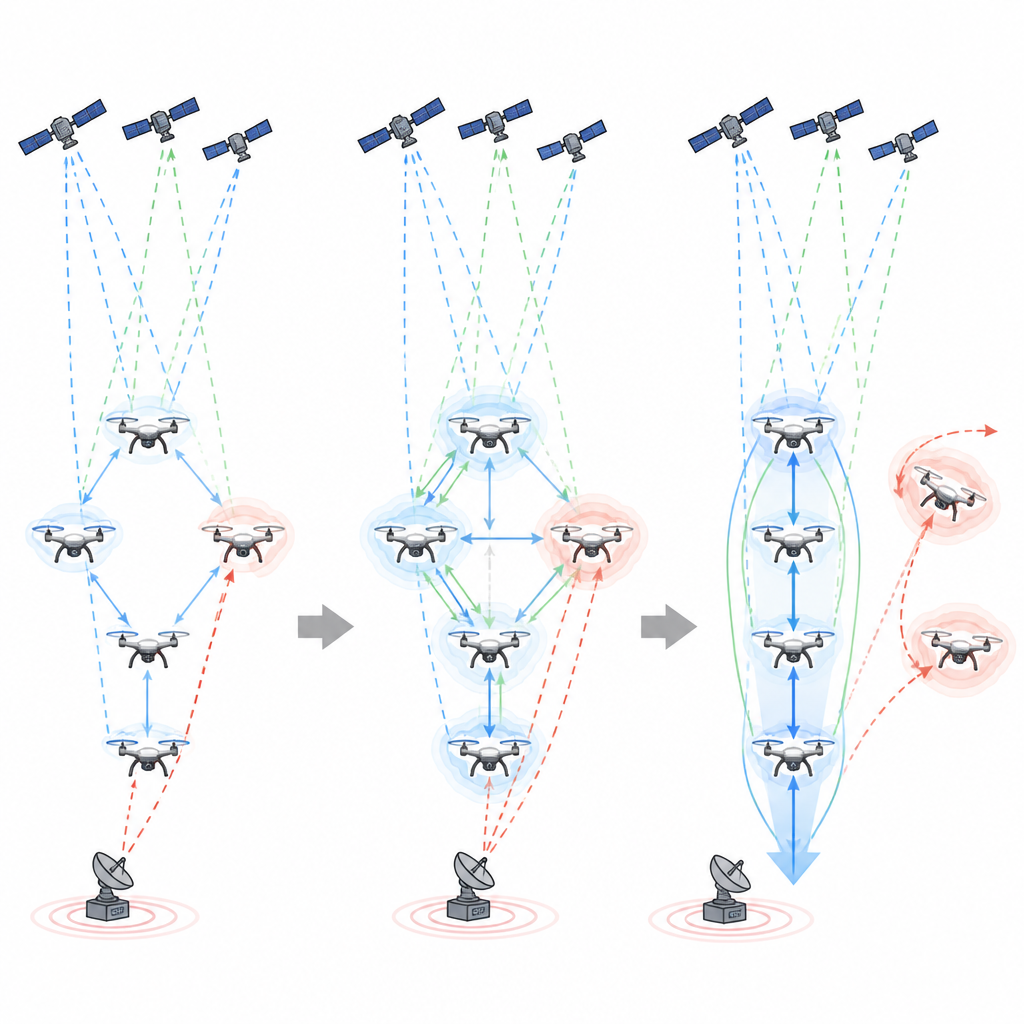
これらの脅威に対抗するため、研究では個々のドローンの挙動と編隊全体のパターンを同時に監視するハイブリッド検知システムを提案します。各ドローンは中心に、過去の運動と搭載センサーに基づいて自身がどう動くはずかを予測する数理トラッカーを走らせ、それを北斗の報告と比較します。異常な差分は疑いを招きます。並行して三種類の学習モデルが手がかりを探します:一つは衛星信号そのもののパターンに注目し、二つ目は運動が時間とともにどう変化するかを追跡し、三つ目は編隊内のドローン同士の関係を検査します。それらの出力は単一のリスクスコアに統合されます。不確かな状況では、ドローンのテレメトリログで訓練された専門的な言語モデルが付加的な“常識チェック”を提供し、反射や突風といった正常な挙動と敵対的干渉を識別するのに役立ちます。
編隊が共同で反応することを教える
検出は半分にすぎません;編隊は賢く反応する必要があります。この枠組みでは、各ドローンが自分の位置、運動、スプーフィングリスクの簡潔な要約を定期的に近隣と共有します。各ドローンはそれを受けてどの隣機が信頼できるかの独自の見解を形成し、疑わしい、あるいは通信が不安定な機体には低い重みを与えます。この信頼重みづけされた合意が各機体の速度と方位の調整に影響します。安全と判断されたドローンが編隊を再整列させる一方で、疑わしいドローンは実質的にランクを下げられ、押し出されるか、移動障害物として扱われます。システムはまた、スプーフィングリスクが低く通信状態が良好な機体に“リーダー”役割を再割り当てすることができ、中央の制御装置なしで秩序ある編隊を維持します。
仮想の空での検証
実世界で偽の衛星信号を送ることは厳しく規制されているため、研究チームは詳細なソフトウェアシミュレータを構築しました。これには北斗の幾何配列、現実的な信号雑音、都市反射、そして悪意あるドローンや複数の協調送信機を含む多様なスプーフィング・ジャミング動作が再現されています。各仮想ドローンは模擬衛星受信機と運動センサーを搭載し、検知と制御アルゴリズムの独立したコピーを実行します。様々な編隊形状、飛行任務、および脅威タイプを網羅する複数の試行で、システムは約97パーセントのケースでスプーフィングを正しく検知し、誤報は非常に少なく、平均反応時間は3秒未満でした。複雑な攻撃下でも編隊の経路のズレは通常5メートル未満に収まり、ほとんどのミッションは成功裏に完了しました。
日常のドローン利用にとっての意義
簡潔に言えば、本研究は協調するドローン群が自分たちの“位置感覚”が改ざんされていることを学び、互いに情報を交換し、編隊を即座に調整して安全性と有用性を保てることを示しています。この手法は標準的な衛星・運動センサーで動作し、分散方式で実行するよう設計されているため、配送、点検、緊急対応に使われる実際の艦隊へ応用可能です。現在の結果はシミュレーションに基づき比較的高性能な搭載計算資源に依存しますが、信頼できる航法が期待できない都市やその他の競合環境でドローン群の耐性を高める道筋を示しています。
引用: Tariq, U., Ahanger, T.A. & Shaukat, K. Tri-stream multi-model architecture for real-time detection of BeiDou signal manipulation in UAV swarms. Sci Rep 16, 15802 (2026). https://doi.org/10.1038/s41598-026-46655-y
キーワード: UAV群, GNSSスプーフィング, 北斗の安全性, ドローン航法, サイバーフィジカル攻撃