Clear Sky Science · it
Architettura multi-modello a tre flussi per il rilevamento in tempo reale della manipolazione dei segnali BeiDou in sciami di UAV
Perché è importante mantenere l’integrità degli sciami di droni
Immaginate una flotta di droni per consegne o robot di soccorso che volano in formazione serrata sopra una città trafficata. Si affidano ai segnali satellitari per sapere dove si trovano. Se un attore malintenzionato falsifica silenziosamente quei segnali, l’intero sciame può deviare dalla rotta, collidere o entrare in spazi aerei vietati. Questo articolo esplora come individuare e contrastare tali inganni in tempo reale, in modo che gruppi numerosi di veicoli aerei senza pilota possano restare al sicuro e portare a termine la missione anche quando il cielo li inganna.
La debolezza nascosta nella navigazione dei droni odierna
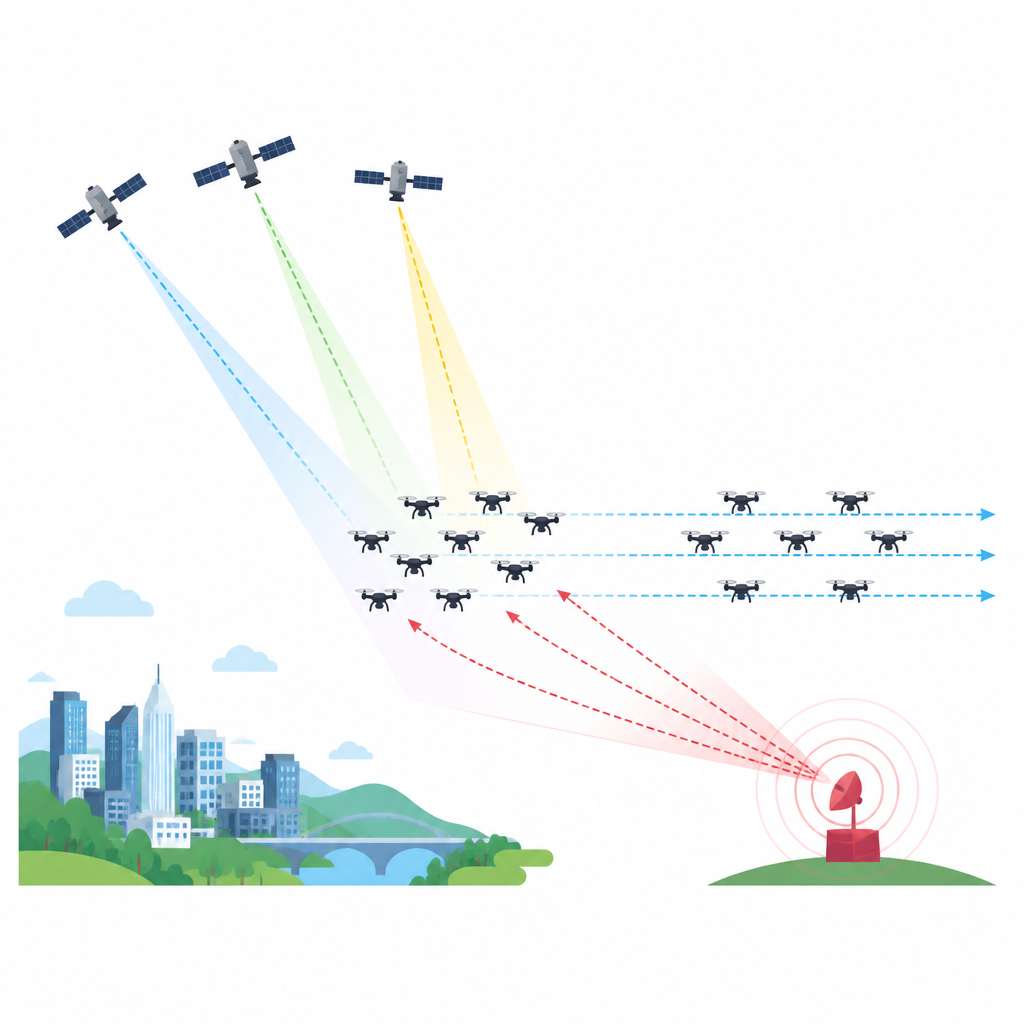
La maggior parte dei droni moderni usa sistemi globali di navigazione satellitare, come il BeiDou cinese, per tracciare posizione e tempo. I droni consumer hanno tipicamente ricevitori semplici a singola frequenza senza misure di sicurezza aggiuntive. Questo li rende bersagli facili per lo spoofing, in cui gli aggressori trasmettono segnali satellitari contraffatti che sovrastano quelli reali. Nei voli in formazione il pericolo si moltiplica: se molti droni accettano le stesse menzogne sulla propria posizione, la loro spaziatura accuratamente coreografata si disfa, aumentando il rischio di collisioni e il fallimento della missione, specialmente negli ambienti urbani “a canyon” ricchi di riflessi e blocchi del segnale.
Molte maniere per ingannare uno sciame
Gli autori descrivono un ampio catalogo di stili d’attacco che possono fuorviare uno sciame. Un potente trasmettitore a terra può inondare un’area di segnali contraffatti, trascinando l’intero gruppo fuori dalla sua zona geofenzionata. Uno spoofer mobile montato su un furgone può agganciare lentamente la traiettoria dello sciame prima di spostarla bruscamente. Un drone compromesso all’interno della formazione può agire da ingannatore locale, guidando i vicini a collidere tra loro. Altre tattiche riproducono segnali reali con ritardo, alterano gradualmente le frequenze o combinano jamming e spoofing in modo che i ricevitori prima perdano il lock e poi riacquisiscano segnali falsi. Nel loro insieme, questi scenari dimostrano che semplici difese su singolo drone non sono sufficienti quando decine di veicoli devono coordinarsi in tempo reale.
Una difesa multilivello “rileva e condividi”
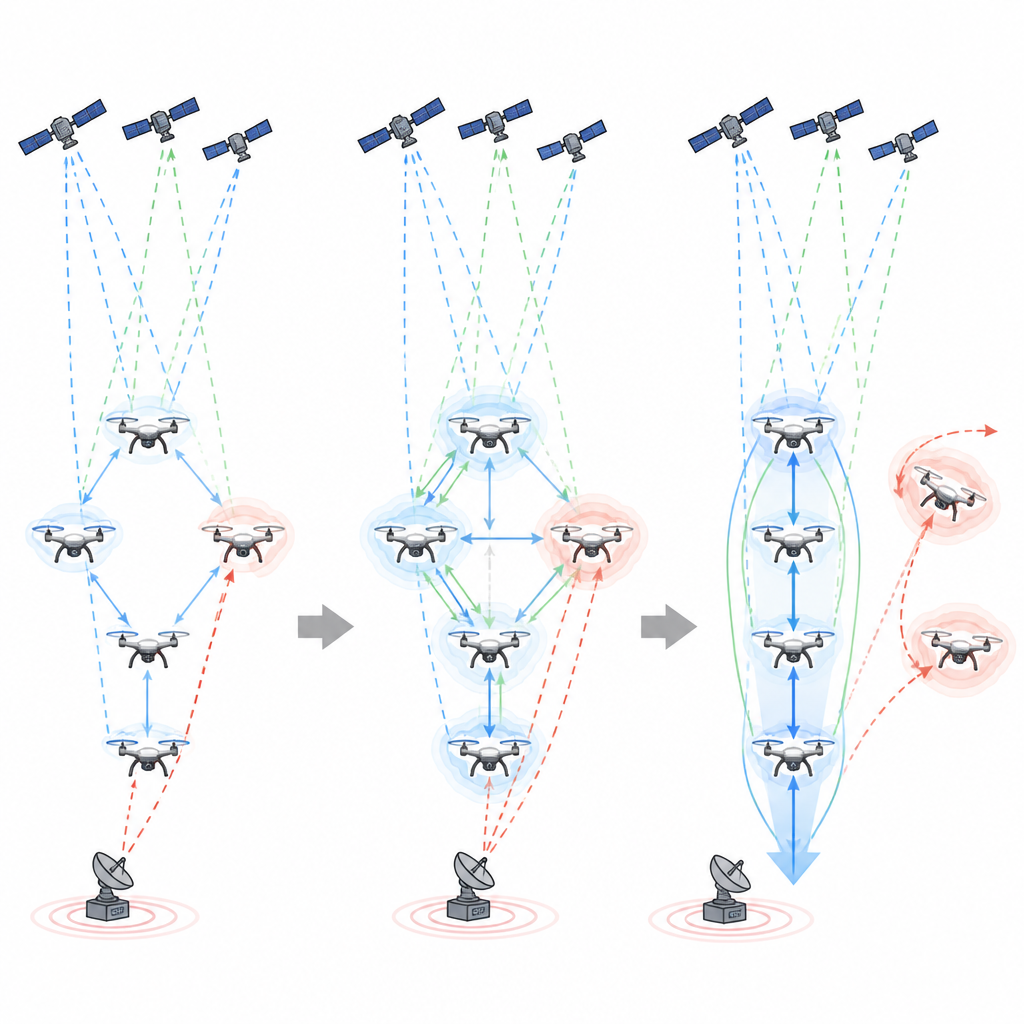
Per contrastare queste minacce, lo studio propone un sistema ibrido di rilevamento che osserva contemporaneamente il comportamento dei singoli droni e i pattern dello sciame. Al centro, ogni drone esegue un tracciatore matematico che predice come dovrebbe muoversi in base al moto passato e ai sensori di bordo, poi confronta questa predizione con quanto indica BeiDou. Differenze anomale destano sospetti. In parallelo, tre tipi di modelli di apprendimento cercano indizi: uno si concentra sui pattern nei segnali satellitari stessi, un altro monitora l’evoluzione del moto nel tempo e un terzo esamina le relazioni tra i droni nella formazione. I loro output vengono combinati in un unico punteggio di rischio. Un modello linguistico specializzato, addestrato su log telemetrici dei droni, fornisce un’ulteriore “verifica di coerenza” quando la situazione è incerta, aiutando a distinguere interferenze ostili da anomalie normali come riflessi o raffiche di vento.
Insegnare allo sciame a reagire insieme
Rilevare è solo metà della storia; lo sciame deve anche rispondere in modo saggio. In questo quadro, ogni drone condivide regolarmente riepiloghi compatti della propria posizione, del moto e del rischio di spoofing con i pari vicini. Ogni drone forma quindi una propria valutazione su quali vicini siano affidabili, dando meno peso a quelli che risultano sospetti o comunicano in modo inaffidabile. Questo consenso pesato sulla fiducia guida come ogni veicolo aggiusta velocità e direzione. I droni che appaiono sicuri aiutano a riportare la formazione in allineamento, mentre i droni sospetti vengono effettivamente declassati, respinti o trattati come ostacoli in movimento. Il sistema può anche riassegnare ruoli di “leader” a droni con basso rischio di spoofing e buoni collegamenti di comunicazione, preservando una formazione ordinata senza alcun controllore centrale.
Testare l’idea in un cielo virtuale
Poiché trasmettere segnali satellitari falsi nel mondo reale è fortemente regolamentato, il team ha costruito un simulatore software dettagliato. Ricrea la geometria di BeiDou, rumore di segnale realistico, riflessioni urbane e una vasta gamma di comportamenti di spoofing e jamming, inclusi droni canaglia e più trasmettitori coordinati. Ogni drone virtuale porta un ricevitore satellitare simulato e sensori di movimento, ed esegue la propria copia degli algoritmi di rilevamento e controllo. In dozzine di prove coprendo diverse forme dello sciame, missioni di volo e tipi di minaccia, il sistema ha correttamente segnalato lo spoofing in circa il 97 percento dei casi, con pochissimi falsi allarmi e un tempo medio di reazione inferiore ai tre secondi. Anche durante attacchi complessi, la traiettoria dello sciame si è tipicamente discostata di meno di cinque metri dalla rotta prevista e quasi tutte le missioni sono state portate a termine con successo.
Cosa significa questo per l’uso quotidiano dei droni
In termini semplici, questo lavoro dimostra che reti di droni cooperanti possono imparare a notare quando il loro “senso della posizione” viene manomesso, parlarsi a vicenda della situazione e adattare la formazione al volo per restare sicuri e utili. L’approccio funziona con sensori satellitari e di movimento standard ed è progettato per funzionare in modo distribuito, quindi potrebbe essere adattato a flotte reali usate per consegne, ispezioni o soccorso. Sebbene i risultati attuali derivino dalla simulazione e dipendano ancora da capacità computazionali di bordo relativamente potenti, tracciano una strada per rendere gli sciami di droni molto più resilienti nelle città e in altri ambienti contendenti dove la navigazione fidata non può essere data per scontata.
Citazione: Tariq, U., Ahanger, T.A. & Shaukat, K. Tri-stream multi-model architecture for real-time detection of BeiDou signal manipulation in UAV swarms. Sci Rep 16, 15802 (2026). https://doi.org/10.1038/s41598-026-46655-y
Parole chiave: Sciami di UAV, Spoofing GNSS, Sicurezza BeiDou, navigazione dei droni, attacchi ciber-fisici