Clear Sky Science · nl
Tri-stream multi-modelarchitectuur voor realtime detectie van BeiDou-signaalmanipulatie in UAV‑swermen
Waarom het belangrijk is dat droneswermen betrouwbaar blijven
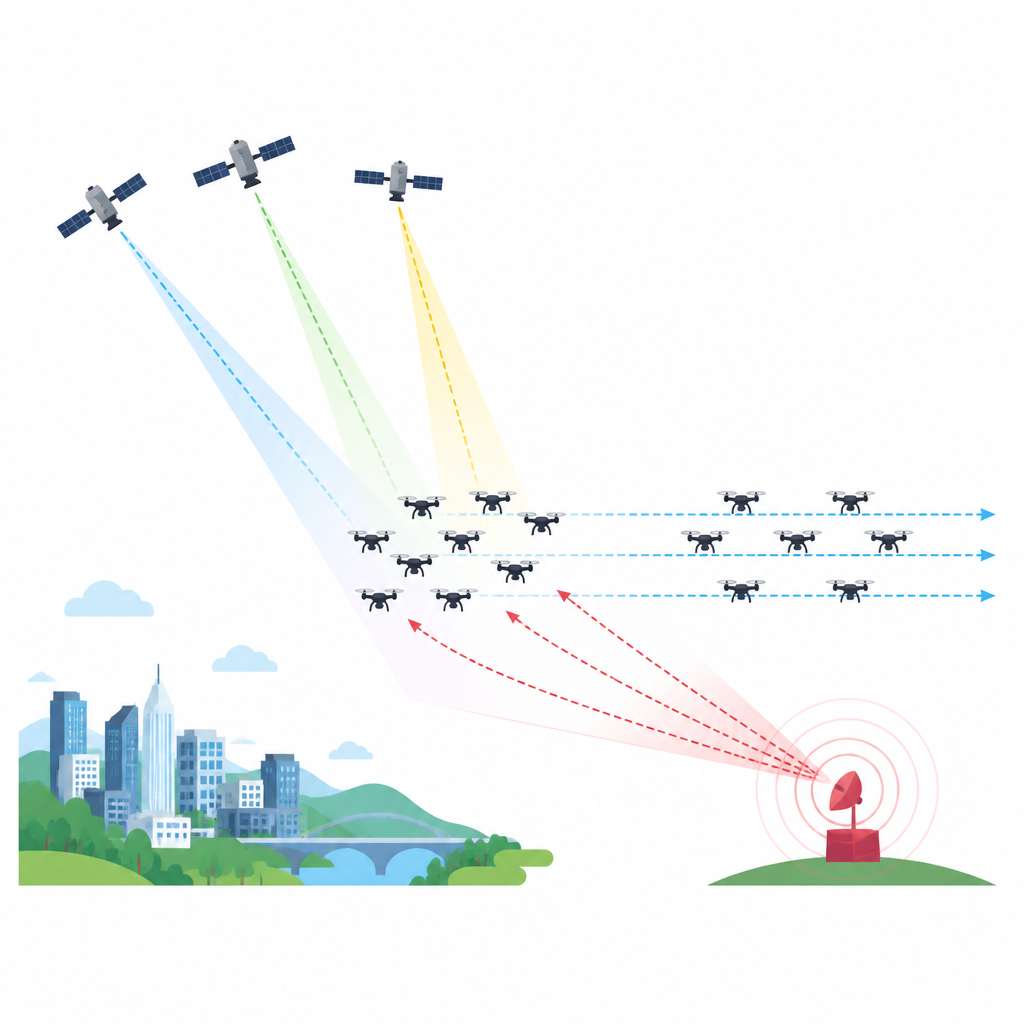
Stel je een vloot bezorgdrones of reddingsrobots voor die in strakke formatie boven een drukke stad vliegen. Ze vertrouwen op satellietsignalen om hun positie te bepalen. Als een kwaadwillende deze signalen heimelijk vervalst, kan de hele swarm van koers raken, botsen of verboden luchtruim binnenvliegen. Dit artikel onderzoekt hoe je zulke misleiding in realtime kunt opsporen en tegengaan, zodat grote groepen onbemande luchtvaartuigen veilig en doelgericht kunnen blijven opereren, zelfs wanneer de lucht hen voorliegt.
De verborgen zwakte in hedendaagse dronenavigatie
De meeste moderne drones gebruiken globale navigatiesatellietsystemen, zoals China’s BeiDou, om positie en tijd bij te houden. Consumentendrones hebben doorgaans simpele enkel‑frequentieontvangers zonder extra beveiliging. Daardoor zijn ze makkelijke doelen voor spoofing, waarbij aanvallers valse satellietsignalen uitzenden die de echte signalen overstemmen. Bij swarms neemt het gevaar toe: als veel drones dezelfde leugens over hun positie accepteren, valt de nauwkeurig uitgedachte afstandsregeling uit elkaar, wat het risico op botsingen en mislukte missies verhoogt, vooral in stedelijke ‘kloof’ omgevingen vol reflecties en signaalblokkades.
Veel manieren om een swarm te misleiden
De auteurs schetsen een uitgebreid overzicht van aanvalstypen die een swarm kunnen misleiden. Een krachtige grondzender kan een gebied overspoelen met vervalste signalen en de hele formatie uit een geofenced zone trekken. Een bewegende spoofer op een bestelwagen kan het traject van de swarm langzaam afleiden en het vervolgens plotseling verschuiven. Een gecompromitteerde drone binnen de formatie kan als lokale misleider fungeren en buren tegen elkaar opjagen. Andere tactieken herhalen echte signalen met vertraging, nemen frequenties geleidelijk vooringenomen over, of combineren jamming en spoofing zodat ontvangers eerst het signaal verliezen en daarna op valse signalen opnieuw vergrendelen. Samen tonen deze scenario’s aan dat eenvoudige één‑droneverdedigingen niet toereikend zijn wanneer tientallen voertuigen realtime moeten samenwerken.
Een gelaagde "sense and share"‑verdediging
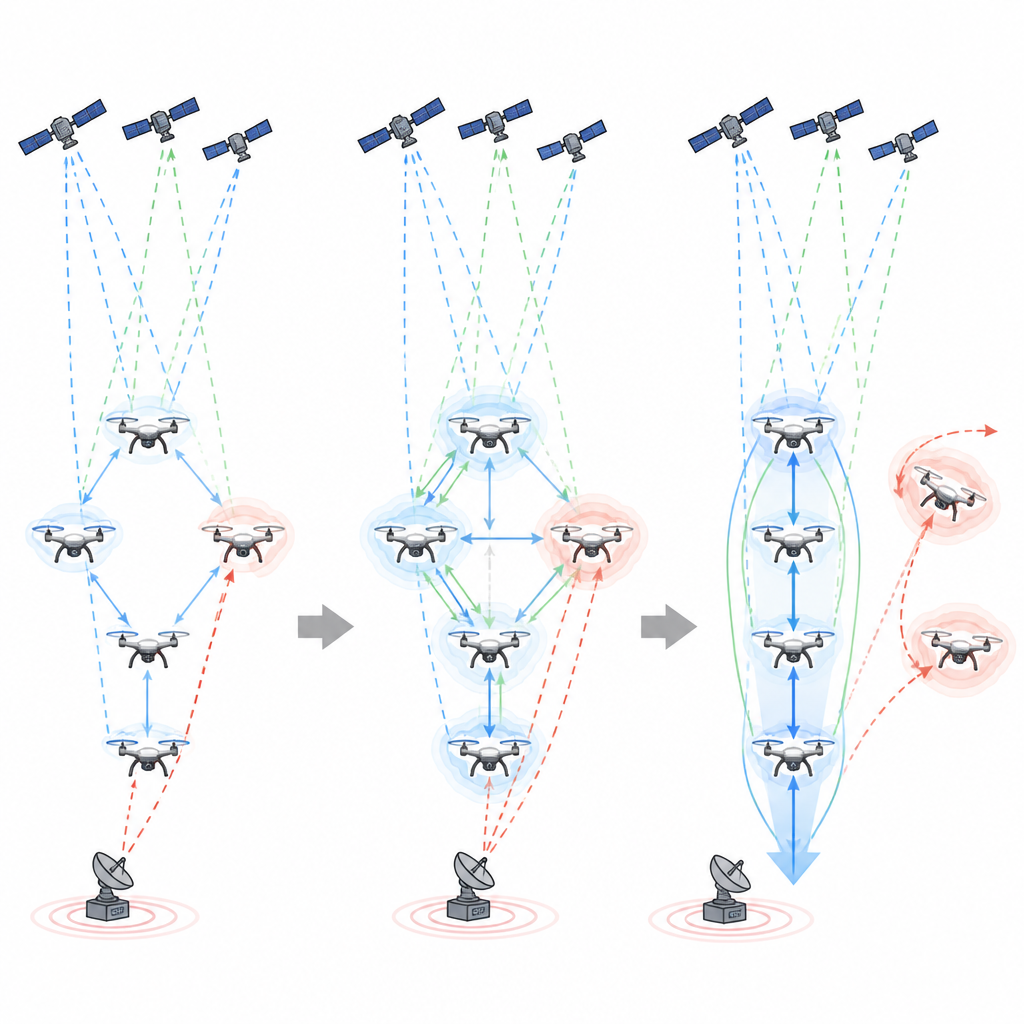
Om deze bedreigingen te bestrijden, stelt de studie een hybride detectiesysteem voor dat tegelijk individueel dronengedrag en swarmpatronen in de gaten houdt. In de kern draait op elke drone een wiskundige tracker die voorspelt hoe die zou moeten bewegen op basis van eerdere bewegingen en boord‑sensoren, en die vergelijking vervolgens afzet tegen wat BeiDou rapporteert. Ongebruikelijke afwijkingen wekken argwaan. Daarnaast zoeken drie typen leermodellen naar aanwijzingen: het ene concentreert zich op patronen in de satellietsignalen zelf, het andere volgt hoe de beweging zich in de tijd ontwikkelt, en een derde onderzoekt de onderlinge relaties tussen drones in de formatie. Hun uitkomsten worden samengevoegd tot één risicoscore. Een gespecialiseerd taalmodel, getraind op drone‑telemetrielogs, levert een extra ‘zindelijkheidscheck’ wanneer de situatie onduidelijk is en helpt vijandige interferentie te onderscheiden van normale afwijkingen zoals reflecties of windstoten.
De swarm leren gezamenlijk te reageren
Detectie is slechts de helft van het verhaal; de swarm moet ook verstandig reageren. In dit raamwerk deelt elke drone regelmatig compacte samenvattingen van positie, beweging en spoofing‑risico met nabije peers. Elke drone vormt vervolgens zijn eigen beeld van welke buren betrouwbaar zijn en geeft minder gewicht aan degenen die verdacht lijken of onbetrouwbaar communiceren. Deze op vertrouwen gewogen consensus bepaalt hoe elk voertuig zijn snelheid en koers aanpast. Drones die veilig lijken helpen de formatie weer op één lijn te trekken, terwijl verdachte drones effectief worden gedegradeerd, weggehouden of behandeld als bewegende obstakels. Het systeem kan ook ‘leider’‑rollen toewijzen aan drones met een laag spoofing‑risico en goede communicatielinks, waardoor een ordelijke formatie behouden blijft zonder centrale controle.
Het idee testen in een virtuele lucht
Aangezien het uitzenden van valse satellietsignalen in de echte wereld streng gereguleerd is, bouwde het team een gedetailleerde softwaresimulator. Die bootst BeiDou‑geometrie, realistische signaalruis, stedelijke reflecties en een breed scala aan spoofing‑ en jamminggedragingen na, inclusief roekeloze drones en meerdere gecoördineerde zenders. Elke virtuele drone draagt een gesimuleerde satellietontvanger en bewegingssensoren en draait een eigen kopie van de detectie‑ en regelalgoritmen. In tientallen testruns met verschillende swarmvormen, vluchttaken en dreigingstypen markeerde het systeem spoofing correct in ongeveer 97 procent van de gevallen, met zeer weinig valse alarmen en een gemiddelde reactietijd van minder dan drie seconden. Zelfs tijdens complexe aanvallen week het traject van de swarm doorgaans minder dan vijf meter af van de bedoelde koers en werden vrijwel alle missies succesvol afgerond.
Wat dit betekent voor dagelijks dronengebruik
In simpele termen laat dit werk zien dat netwerken van samenwerkende drones kunnen leren signalen te herkennen wanneer hun ’gevoel voor plaats’ wordt gemanipuleerd, er met elkaar over te communiceren en de formatie ter plaatse aan te passen om veilig en bruikbaar te blijven. De aanpak werkt met standaard satelliet‑ en bewegingssensoren en is ontworpen om gedistribueerd te draaien, zodat het kan worden aangepast aan echte vloten voor bezorging, inspectie of noodhulp. Hoewel de huidige resultaten uit simulatie komen en nog afhankelijk zijn van relatief krachtige boordcomputers, banen ze de weg naar veel veerkrachtiger droneswermen in steden en andere betwiste omgevingen waar betrouwbare navigatie niet vanzelfsprekend is.
Bronvermelding: Tariq, U., Ahanger, T.A. & Shaukat, K. Tri-stream multi-model architecture for real-time detection of BeiDou signal manipulation in UAV swarms. Sci Rep 16, 15802 (2026). https://doi.org/10.1038/s41598-026-46655-y
Trefwoorden: UAV‑swermen, GNSS‑spoofing, BeiDou‑beveiliging, dronenavigatie, cyber‑fysieke aanvallen