Clear Sky Science · ru
Многопоточечная мультимодельная архитектура для обнаружения манипуляций сигналами BeiDou в реальном времени в роях БПЛА
Почему важно удерживать рои дронов честными
Представьте флот доставочных дронов или спасательных роботов, летящих плотным строем над оживлённым городом. Они полагаются на спутниковые сигналы, чтобы знать своё местоположение. Если злоумышленник тихо подменит эти сигналы, весь рой может сбиться с курса, столкнуться или войти в запрещённую зону. В этой работе исследуется, как обнаруживать и противодействовать такой подмене в реальном времени, чтобы большие группы беспилотных летательных аппаратов оставались в безопасности и выполняли задачу, даже когда «небо лжёт».
Скрытая слабость современной навигации дронов
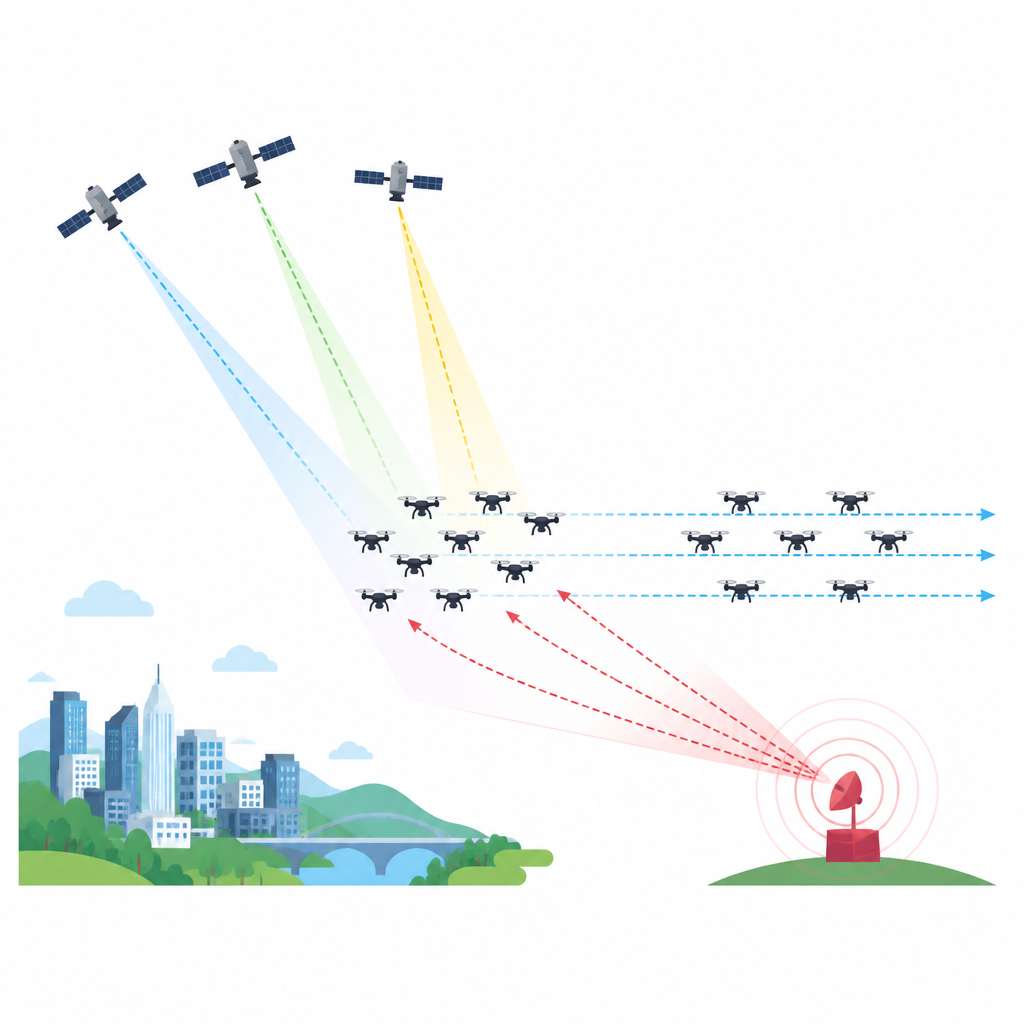
Большинство современных дронов используют глобальные навигационные спутниковые системы, такие как китайская BeiDou, для отслеживания положения и времени. Потребительские дроны обычно оснащены простыми одночастотными приёмниками без дополнительных мер безопасности. Это делает их лёгкой мишенью для спуфинга, когда атакующие вещают поддельные спутниковые сигналы, подавляющие реальные. В полётах роём опасность умножается: если многие дроны принимают одни и те же ложные данные о своём положении, их тщательно продуманная расстановка нарушается, что повышает риск столкновений и срыва миссии, особенно в городских «каньонах» с множественными отражениями и блокировками сигналов.
Множество способов обмануть рой
Авторы составляют широкий каталог стилей атак, способных ввести рой в заблуждение. Мощный наземный передатчик может залить область поддельными сигналами, уводя всю группу за пределы геозоны. Передвигающийся спуфер, установленный на фургоне, может медленно смещать маршрут роя, а затем внезапно изменить его. Скомпрометированный дрон внутри строя может действовать как локальный обманщик, подталкивая соседей друг к другу. Другие тактики включают повторную передачу реальных сигналов с задержкой, постепенное смещение частот или сочетание глушения и спуфинга так, что приёмники сначала теряют захват, а затем снова захватывают ложные сигналы. В совокупности эти сценарии показывают, что простых защит одного дрона недостаточно, когда десятки аппаратов должны координироваться в реальном времени.
Многоуровневая защита «обнаруживай и делись»
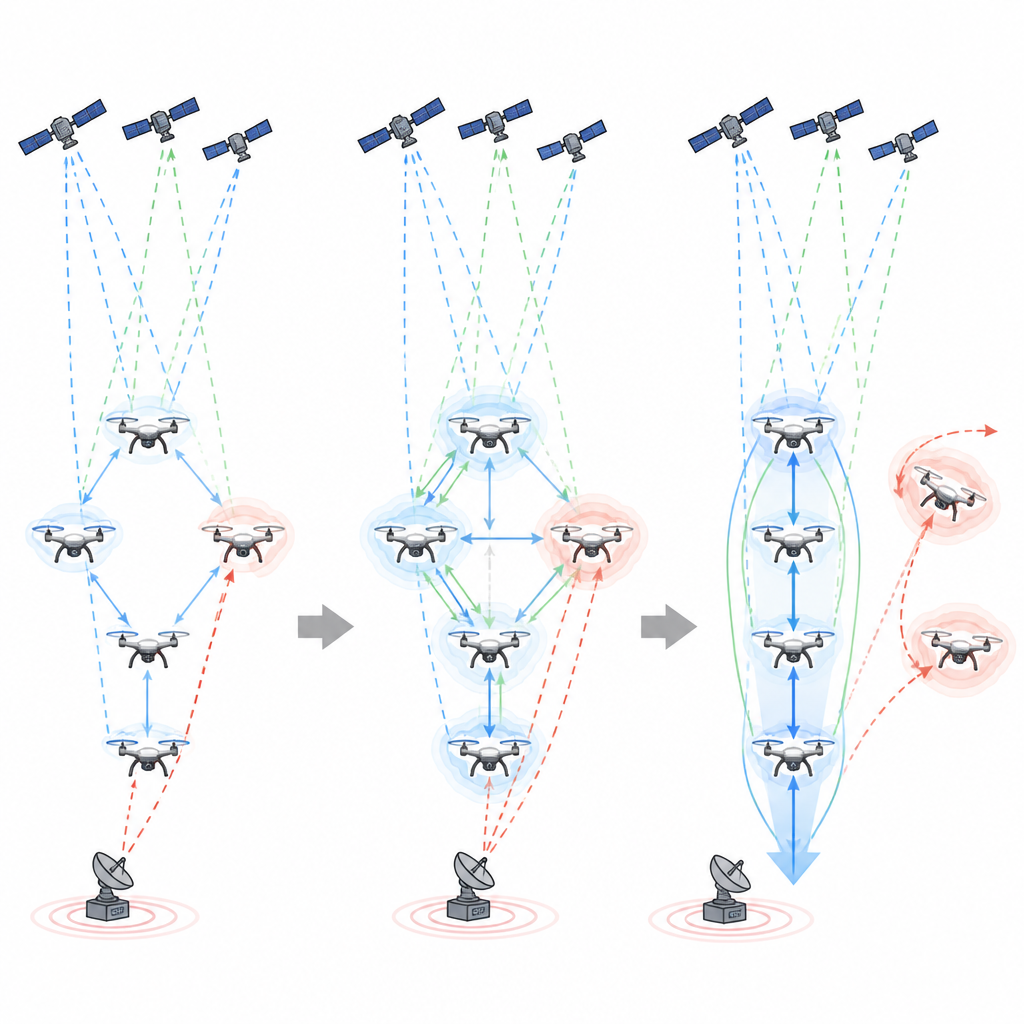
Чтобы противостоять этим угрозам, исследование предлагает гибридную систему обнаружения, которая одновременно отслеживает поведение отдельного дрона и паттерны всего роя. В основе каждого дрона лежит математический трекер, предсказывающий, как он должен двигаться на основе прошлой кинематики и бортовых датчиков, и сравнивающий это с данными BeiDou. Необычные расхождения вызывают подозрение. Наряду с этим три типа обучаемых моделей ищут подсказки: одна фокусируется на паттернах в самих спутниковых сигналах, другая отслеживает эволюцию движения во времени, а третья анализирует взаимосвязи между дронами в формации. Их выходы объединяются в единый показатель риска. Специализированная языковая модель, обученная на телеметрических логах дронов, даёт дополнительную «проверку здравого смысла», когда ситуация неоднозначна, помогая отличать враждебные вмешательства от обычных аномалий, таких как отражения или порыв ветра.
Обучение роя совместной реакции
Обнаружение — лишь половина дела; рой должен также разумно реагировать. В этой схеме каждый дрон регулярно обменивается компактными сводками о своём положении, движении и уровне риска спуфинга с ближайшими сотоварищами. Затем каждый аппарат формирует собственное представление о том, какие соседи заслуживают доверия, снижая вес тем, кто выглядит подозрительно или ненадёжно передаёт данные. Этот взвешенный доверием консенсус формирует корректировки скорости и направления каждого аппарата. Кажется безопасными дроны помогают вернуть строй в линию, тогда как подозрительные аппараты фактически понижаются в приоритете, отталкиваются или рассматриваются как движущиеся препятствия. Система также может переназначать «лидерские» роли существующим дронам с низким риском спуфинга и хорошими каналами связи, сохраняя упорядоченную формацию без центрального контроллера.
Тестирование идеи в виртуальном небе
Поскольку в реальном мире вещание поддельных спутниковых сигналов строго регулируется, команда построила подробный программный симулятор. Он воссоздаёт геометрию BeiDou, реалистичный шум сигналов, городские отражения и широкий спектр поведений при спуфинге и глушении, включая rogue-дроны и несколько скоординированных передатчиков. Каждый виртуальный дрон несёт смоделированный спутниковый приёмник и датчики движения и запускает собственные копии алгоритмов обнаружения и управления. В десятках прогонов, охватывающих разные формы роя, миссии и типы угроз, система корректно помечала спуфинг примерно в 97 процентах случаев, с очень малым числом ложных срабатываний и средней реакцией менее трёх секунд. Даже при сложных атаках путь роя обычно отклонялся менее чем на пять метров от задуманного курса, и почти все миссии завершались успешно.
Что это значит для повседневного использования дронов
Проще говоря, эта работа показывает, что сети сотрудничающих дронов могут научиться замечать, когда их «чувство места» подменяют, обсуждать это между собой и динамично корректировать формацию, чтобы оставаться в безопасности и полезными. Подход работает со стандартными спутниковыми и инерциальными датчиками и рассчитан на распределённую работу, поэтому его можно адаптировать к реальным флотам для доставки, инспекций или реагирования на чрезвычайные ситуации. Хотя текущие результаты получены в симуляции и всё ещё зависят от относительно мощных бортовых вычислений, они прокладывают путь к тому, чтобы рои дронов стали значительно более устойчивыми в городах и других оспариваемых средах, где надёжной навигации нельзя просто доверять.
Цитирование: Tariq, U., Ahanger, T.A. & Shaukat, K. Tri-stream multi-model architecture for real-time detection of BeiDou signal manipulation in UAV swarms. Sci Rep 16, 15802 (2026). https://doi.org/10.1038/s41598-026-46655-y
Ключевые слова: Рои БПЛА, Спуфинг GNSS, Безопасность BeiDou, Навигация дронов, Кибер-физические атаки