Clear Sky Science · sv
Tri-ströms flermodellsarkitektur för realtidsdetektion av manipulation av BeiDou-signaler i UAV-svärmar
Varför det är viktigt att hålla drönarsvärmar ärliga
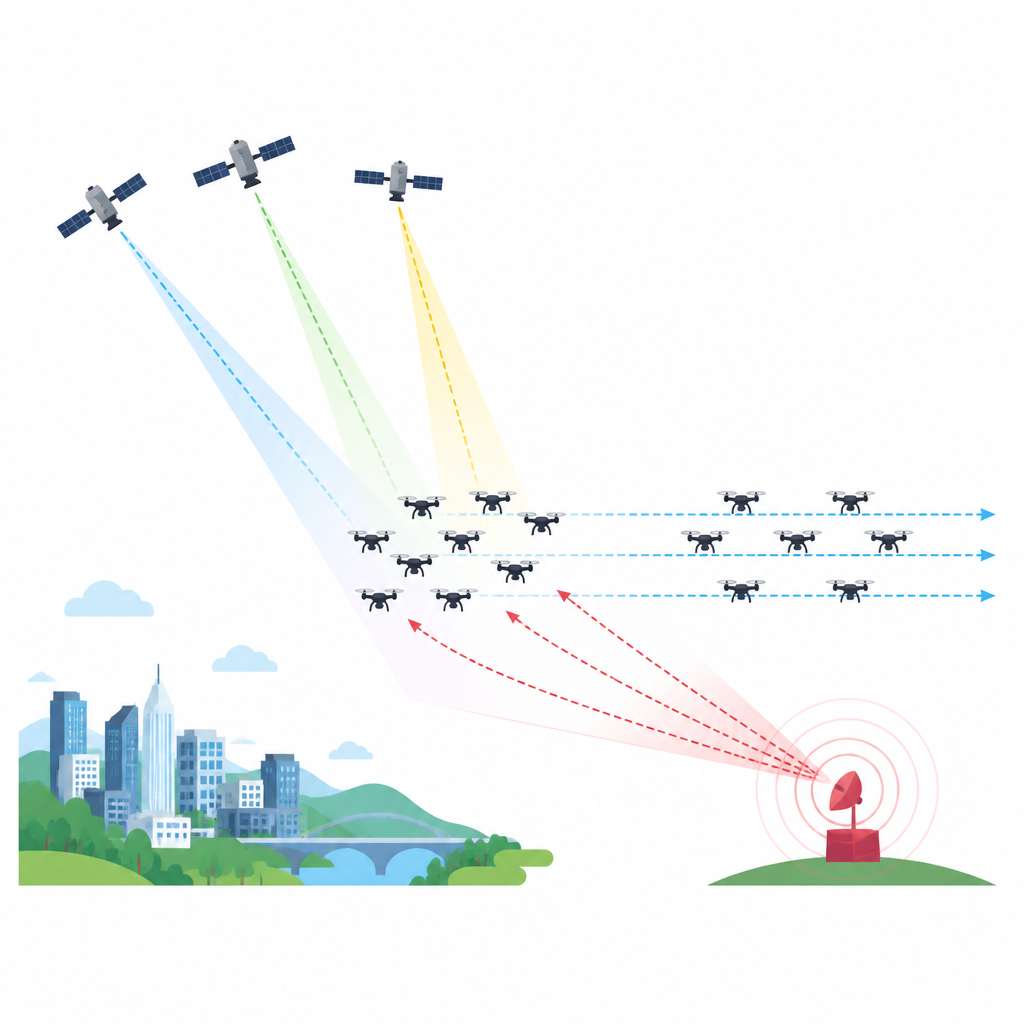
Föreställ dig en flotta leveransdrönare eller räddningsrobotar som flyger i tajt formation över en tät stad. De förlitar sig på satellitsignaler för att veta var de befinner sig. Om en illvillig aktör tyst förfalskar de signalerna kan hela svärmen driva av kurs, kollidera eller hamna i förbjudet luftrum. Denna artikel undersöker hur man kan upptäcka och motverka sådan manipulation i realtid, så att stora grupper obemannade luftfarkoster kan förbli säkra och genomföra sina uppdrag även när himlen ljuger för dem.
Den dolda svagheten i dagens drönarnavigation
De flesta moderna drönare använder globala navigationssatellitsystem, som Kinas BeiDou, för positions- och tidsbestämning. Konsumentdrönare har ofta enkla, enfrekventa mottagare utan extra säkerhet. Det gör dem till lätta mål för spoofing, där angripare sänder falska satellitsignaler som överväldigar de verkliga. I svärmflygningar multipliceras faran: om många drönare accepterar samma lögner om var de är fallerar den noggrant koreograferade avståndshållningen, vilket ökar risken för kollisioner och misslyckade uppdrag—särskilt i täta urbana «kanjon»-miljöer fyllda av reflektioner och signalblockeringar.
Många sätt att lura en svärm
Författarna kartlägger ett rikt katalog av angreppsstrategier som kan vilseleda en svärm. En kraftfull markbaserad sändare kan översvämma ett område med förfalskade signaler och dra gruppen bort från dess geofenced områden. En rörlig spoofer monterad på en skåpbil kan långsamt dra svärmens bana ur kurs innan den plötsligt skiftar position. En komprometterad drönare inne i formationen kan agera som lokal bedragare och styra närliggande grannar in i varandra. Andra taktiker återuppspelar verkliga signaler med fördröjning, introducerar gradvisa frekvensförskjutningar eller kombinerar störning och spoofing så att mottagare först förlorar lås och sedan återfår på falska signaler. Tillsammans visar dessa scenarier att enkla en-drönare-försvar inte räcker när dussintals farkoster måste samordna i realtid.
Ett flerskiktat "sense and share"-försvar
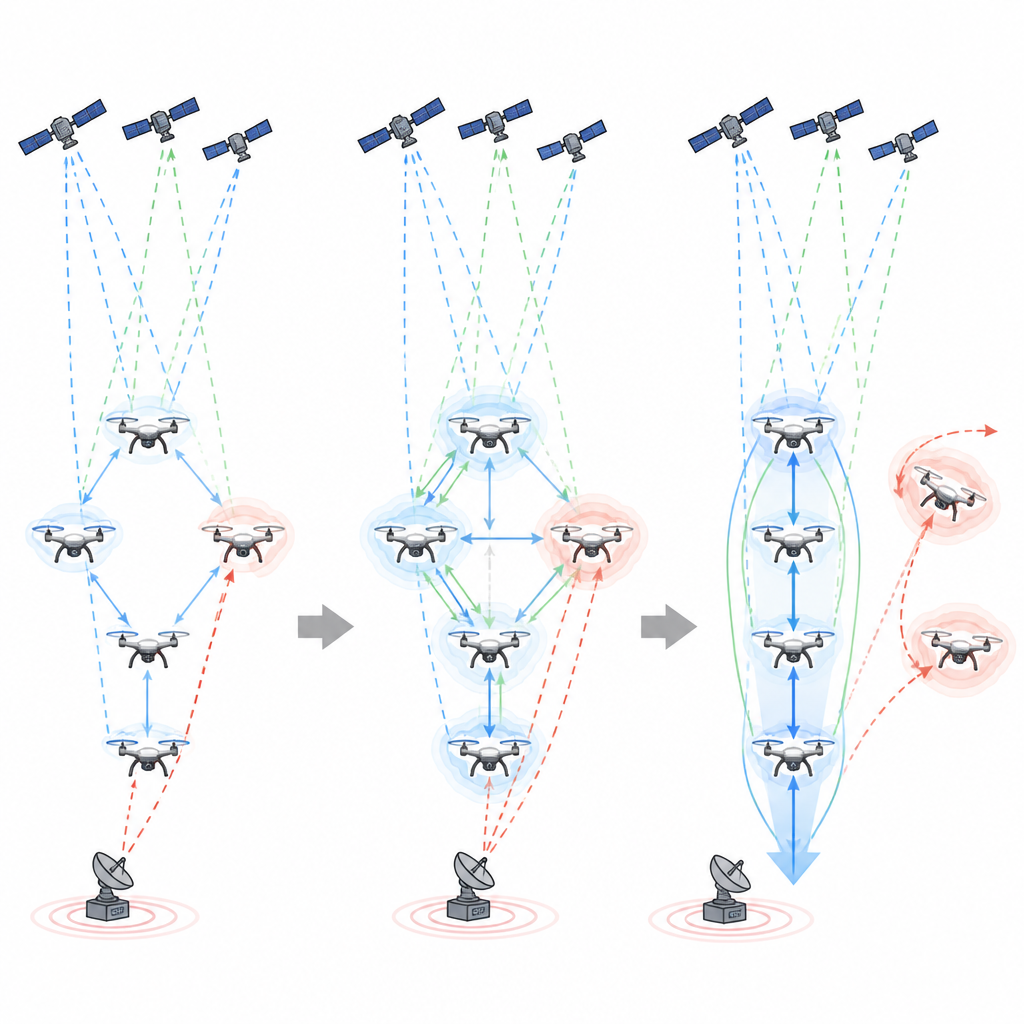
För att motverka dessa hot föreslår studien ett hybriddetekteringssystem som övervakar både individuell drönarbeteende och svärmmönster samtidigt. I grunden kör varje drönare en matematisk spårare som förutser hur den borde röra sig baserat på tidigare rörelser och ombord sensorer, och jämför detta med vad BeiDou rapporterar. Ovanliga avvikelser väcker misstanke. Parallellt söker tre typer av inlärningsmodeller efter ledtrådar: en fokuserar på mönster i satellitsignalerna själva, en annan följer hur rörelsen utvecklas över tid, och en tredje undersöker hur drönare förhåller sig till varandra i formationen. Deras utdata kombineras till en enda riskpoäng. En specialiserad språkmodell, tränad på drönartelematriloggar, ger en extra "sunt förnuft"-kontroll när situationen är oklar och hjälper till att skilja fientlig störning från normala avvikelser som reflektioner eller vindkast.
Att lära svärmen reagera tillsammans
Detektion är bara halva historien; svärmen måste också reagera klokt. I detta ramverk delar varje drönare regelbundet kompakta sammanfattningar av sin position, rörelse och spoofingrisk med närliggande kamrater. Varje drönare bildar sedan sin egen uppfattning om vilka grannar som är pålitliga och ger mindre vikt åt de som verkar misstänkta eller kommunicerar opålitligt. Denna viktade konsensus formar hur varje farkost justerar hastighet och riktning. Drönare som verkar säkra hjälper till att dra formationen tillbaka i linje, medan misstänkta drönare effektivt nedprioriteras, knuffas bort eller behandlas som rörliga hinder. Systemet kan också omfördela "ledarrollen" till drönare med låg spoofingrisk och goda kommunikationslänkar, vilket bevarar en ordnad formation utan någon central styrning.
Test av idén i en virtuell himmel
Eftersom sändning av falska satellitsignaler i verkliga världen är starkt reglerat byggde teamet istället en detaljerad mjukvarusimulator. Den återskapar BeiDou-geometri, realistiskt signalbrus, urbana reflektioner och ett brett spektrum av spoofing- och störbeteenden, inklusive illasinnade drönare och flera koordinerade sändare. Varje virtuell drönare bär en simulerad satellitmottagare och rörelsesensorer och kör sin egen kopia av detektions- och styralgoritmerna. Över dussintals testkörningar som täcker olika svärmformer, flyguppdrag och hottyper flaggade systemet korrekt spoofing i cirka 97 procent av fallen, med mycket få falsklarm och en genomsnittlig reaktionstid på under tre sekunder. Även under komplexa attacker avvek svärmens bana vanligtvis mindre än fem meter från sin avsedda kurs, och nästan alla uppdrag slutfördes framgångsrikt.
Vad detta betyder för vardaglig drönaranvändning
Enkelt uttryckt visar detta arbete att nätverk av samarbetande drönare kan lära sig att märka när deras "positionskänsla" manipuleras, prata med varandra om det och justera formationen i farten för att förbli säkra och användbara. Metoden fungerar med standard satellit- och rörelsesensorer och är utformad för att köras distribuerat, så den skulle kunna anpassas till verkliga flottiljer för leveranser, inspektioner eller räddningsinsatser. Även om de nuvarande resultaten kommer från simulering och fortfarande kräver relativt kraftfull ombordberäkning, banar de väg för att göra drönarsvärmar mycket mer motståndskraftiga i städer och andra trakterade miljöer där betrodd navigation inte kan tas för given.
Citering: Tariq, U., Ahanger, T.A. & Shaukat, K. Tri-stream multi-model architecture for real-time detection of BeiDou signal manipulation in UAV swarms. Sci Rep 16, 15802 (2026). https://doi.org/10.1038/s41598-026-46655-y
Nyckelord: UAV-svärmar, GNSS-spoofing, BeiDou-säkerhet, drönarnavigation, cyber-fysiska attacker