Clear Sky Science · fr
Architecture multimodèle à trois flux pour la détection en temps réel de la manipulation des signaux BeiDou dans des essaims de drones
Pourquoi il est crucial d’assurer l’intégrité des essaims de drones
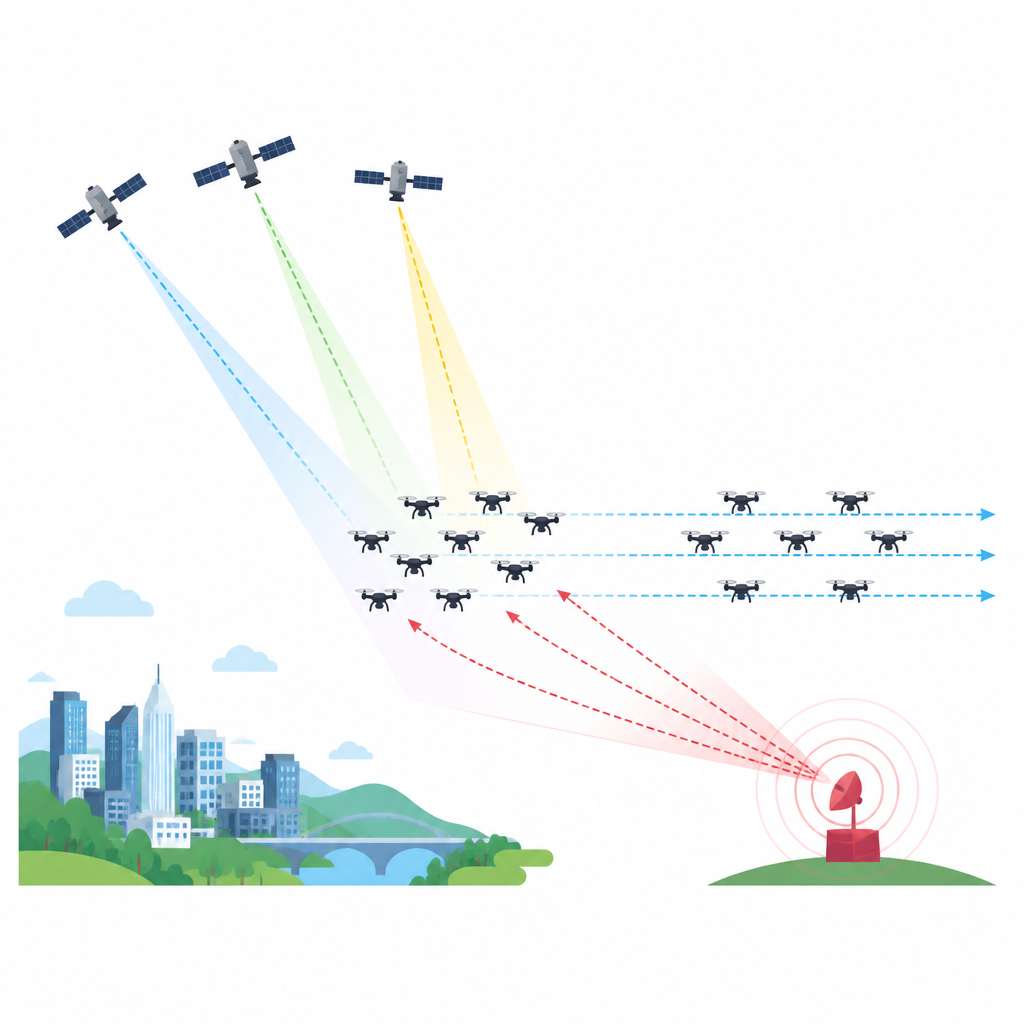
Imaginez une flotte de drones de livraison ou de robots de secours volant en formation serrée au-dessus d’une ville animée. Ils s’appuient sur des signaux satellites pour savoir où ils se trouvent. Si un acteur malveillant falsifie discrètement ces signaux, tout l’essaim peut dévier, entrer en collision ou pénétrer un espace aérien interdit. Cet article explore comment détecter et contrer ce type de tromperie en temps réel, afin que de grands groupes de véhicules aériens sans pilote restent sûrs et accomplissent leur mission, même lorsque le ciel leur ment.
La faiblesse cachée de la navigation des drones actuels
La plupart des drones modernes utilisent des systèmes mondiaux de navigation par satellite, comme le BeiDou chinois, pour estimer leur position et l’heure. Les drones grand public ont généralement des récepteurs simples, mono‑fréquence, sans protections supplémentaires. Ils sont donc des cibles faciles pour le spoofing, où des attaquants émettent des signaux satellites falsifiés qui supplantent les signaux réels. En vol en essaim, le danger se multiplie : si de nombreux drones acceptent les mêmes mensonges sur leur position, l’espacement chorégraphié se détériore, augmentant le risque de collisions et d’échecs de mission, notamment dans des « canyons » urbains pleins de réflexions et d’obstructions de signal.
De nombreuses façons de tromper un essaim
Les auteurs dressent un catalogue riche de styles d’attaque susceptibles d’induire en erreur un essaim. Un émetteur au sol puissant peut inonder une zone de signaux contrefaits, entraînant le groupe hors d’une zone géofencée. Un leurre mobile monté sur une camionnette peut tirer lentement la trajectoire de l’essaim hors de son cap avant de la faire basculer soudainement. Un drone compromis à l’intérieur de la formation peut agir comme un trompeur local, dirigeant les voisins proches l’un contre l’autre. D’autres tactiques rejouent des signaux réels avec un délai, biaisent progressivement les fréquences, ou combinent brouillage et spoofing pour faire d’abord perdre le verrou aux récepteurs puis les réacquérir sur de faux signaux. Ensemble, ces scénarios montrent que des défenses simples à un seul drone ne suffisent pas quand des dizaines d’appareils doivent se coordonner en temps réel.
Une défense multi‑couche « détecter et partager »
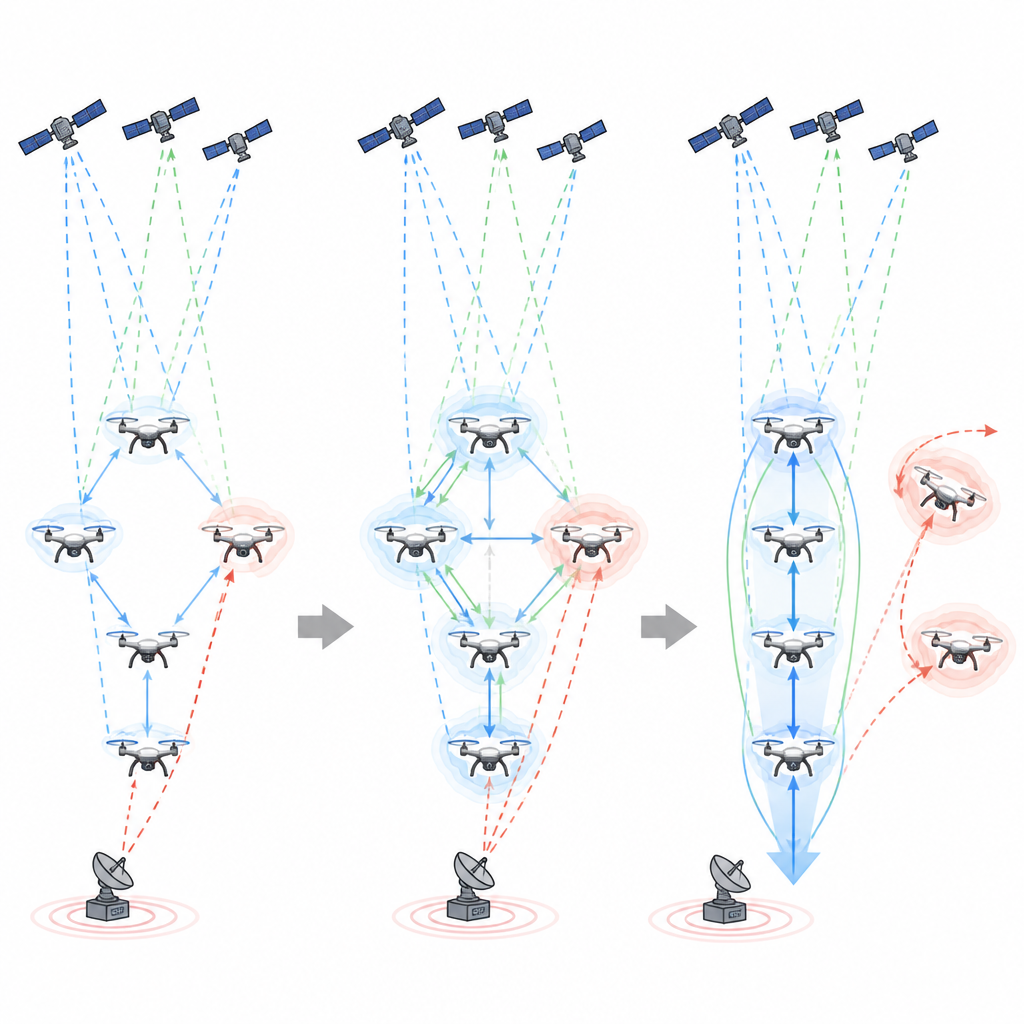
Pour contrer ces menaces, l’étude propose un système de détection hybride qui surveille simultanément le comportement individuel de chaque drone et les motifs au niveau de l’essaim. Au cœur du système, chaque drone exécute un traceur mathématique qui prédit sa trajectoire d’après les mouvements passés et les capteurs embarqués, puis la compare aux indications de BeiDou. Des écarts inhabituels éveillent les soupçons. En parallèle, trois types de modèles d’apprentissage cherchent des indices : l’un se concentre sur les motifs dans les signaux satellites eux‑mêmes, un autre suit l’évolution du mouvement dans le temps, et un troisième examine les relations entre drones au sein de la formation. Leurs sorties sont combinées en un score de risque unique. Un modèle de langage spécialisé, entraîné sur des journaux de télémétrie de drones, fournit une vérification complémentaire lorsque la situation est ambiguë, aidant à distinguer une interférence hostile d’anomalies normales comme des réflexions ou des rafales de vent.
Apprendre à l’essaim à réagir collectivement
La détection ne fait que la moitié du travail ; l’essaim doit aussi répondre judicieusement. Dans ce cadre, chaque drone partage régulièrement des résumés compacts de sa position, de son mouvement et de son risque de spoofing avec ses pairs voisins. Chaque appareil construit ensuite sa propre vue de la fiabilité des voisins, en accordant moins de poids à ceux qui semblent suspects ou communiquent de façon peu fiable. Ce consensus pondéré par la confiance conditionne les ajustements de vitesse et de direction. Les drones jugés sûrs contribuent à réaligner la formation, tandis que les drones suspects sont déclassés, repoussés ou traités comme des obstacles en mouvement. Le système peut aussi réassigner des rôles de « leader » à des drones présentant un faible risque de spoofing et de bonnes liaisons de communication, préservant une formation ordonnée sans contrôleur central.
Tester l’idée dans un ciel virtuel
Parce que la diffusion de faux signaux satellites dans la réalité est strictement réglementée, l’équipe a construit un simulateur logiciel détaillé. Il recrée la géométrie BeiDou, le bruit de signal réaliste, les réflexions urbaines et une large gamme de comportements de spoofing et de brouillage, y compris des drones renégats et plusieurs émetteurs coordonnés. Chaque drone virtuel porte un récepteur satellite simulé et des capteurs de mouvement, et exécute sa propre copie des algorithmes de détection et de contrôle. Sur des dizaines d’essais couvrant différentes formes d’essaim, missions de vol et types de menace, le système a correctement signalé le spoofing dans environ 97 % des cas, avec très peu de fausses alertes et un temps de réaction moyen inférieur à trois secondes. Même lors d’attaques complexes, la trajectoire de l’essaim déviait généralement de moins de cinq mètres par rapport à la route prévue, et presque toutes les missions étaient menées à bien.
Ce que cela signifie pour l’usage courant des drones
En termes simples, ce travail montre que des réseaux de drones coopératifs peuvent apprendre à repérer quand leur « sens de la position » est altéré, à en discuter entre eux et à ajuster leur formation à la volée pour rester sûrs et opérationnels. L’approche fonctionne avec des capteurs satellites et de mouvement standard et est conçue pour s’exécuter de façon distribuée, de sorte qu’elle pourrait être adaptée à des flottes réelles utilisées pour la livraison, l’inspection ou les interventions d’urgence. Bien que les résultats actuels proviennent de simulations et dépendent encore d’une puissance de calcul embarquée relativement élevée, ils ouvrent la voie à des essaims de drones beaucoup plus résilients dans les villes et autres environnements contestés où la navigation de confiance ne peut être tenue pour acquise.
Citation: Tariq, U., Ahanger, T.A. & Shaukat, K. Tri-stream multi-model architecture for real-time detection of BeiDou signal manipulation in UAV swarms. Sci Rep 16, 15802 (2026). https://doi.org/10.1038/s41598-026-46655-y
Mots-clés: Essaims de UAV, Spoofing GNSS, Sécurité BeiDou, Navigation de drones, Attaques cyber-physiques