Clear Sky Science · pt
Arquitetura multimodal tri-fluxo para detecção em tempo real de manipulação do sinal BeiDou em enxames de UAV
Por que é importante manter a honestidade dos enxames de drones
Imagine uma frota de drones de entrega ou robôs de resgate voando em formação apertada sobre uma cidade movimentada. Eles dependem de sinais de satélite para saber onde estão. Se um agente malicioso fingir silenciosamente esses sinais, todo o enxame pode sair da rota, colidir ou entrar em espaço aéreo restrito. Este artigo explora como detectar e contrariar esse tipo de truque em tempo real, para que grandes grupos de veículos aéreos não tripulados possam permanecer seguros e cumprir a missão mesmo quando o céu os engana.
A fraqueza oculta na navegação atual de drones
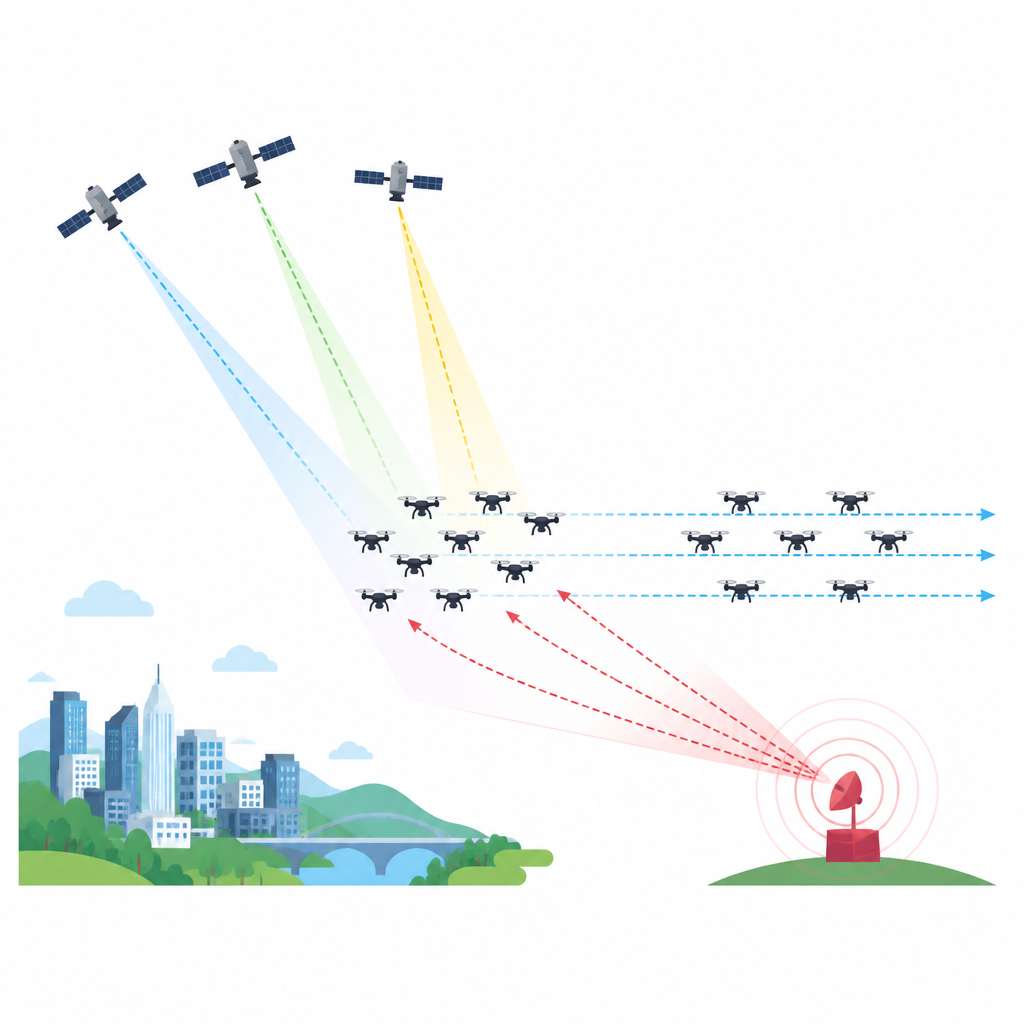
A maioria dos drones modernos usa sistemas globais de navegação por satélite, como o BeiDou da China, para rastrear posição e tempo. Drones de consumo tipicamente têm receptores simples de uma única frequência sem segurança adicional. Isso os torna alvos fáceis para spoofing, em que atacantes transmitem sinais de satélite falsos que sobrepujam os reais. Em voos em enxame, o perigo se multiplica: se muitos drones aceitam as mesmas mentiras sobre sua posição, o espaçamento cuidadosamente coreografado se desfaz, aumentando o risco de colisões e falhas na missão, especialmente em “cânions” urbanos cheios de reflexões e bloqueios de sinal.
Muitas maneiras de enganar um enxame
Os autores mapeiam um catálogo amplo de estilos de ataque que podem enganar um enxame. Um transmissor terrestre potente pode inundar uma área com sinais falsificados, puxando todo o grupo para fora da sua região geográfica protegida. Um spoofer móvel montado em uma van pode arrastar lentamente a trajetória do enxame antes de deslocá-la repentinamente. Um drone comprometido dentro da formação pode atuar como um enganador local, conduzindo vizinhos para colisões. Outras táticas reencenam sinais reais com atraso, deslocam gradualmente frequências ou combinam jamming e spoofing para que os receptores primeiro percam o sincronismo e depois recatemem em sinais falsos. Juntas, essas situações mostram que defesas simples em um único drone não são suficientes quando dezenas de veículos devem coordenar-se em tempo real.
Uma defesa em múltiplas camadas de “sensoriar e compartilhar”
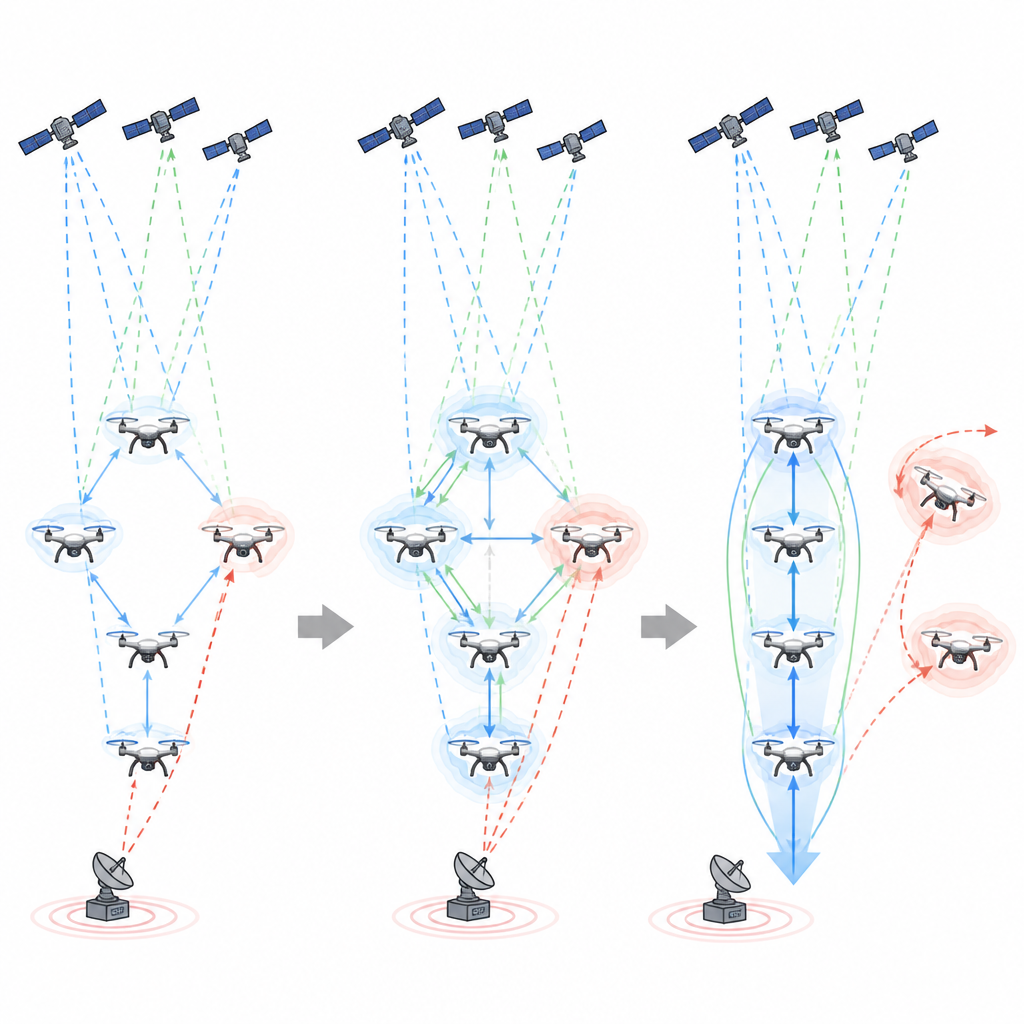
Para contrariar essas ameaças, o estudo propõe um sistema híbrido de detecção que observa simultaneamente o comportamento individual do drone e os padrões do enxame. No núcleo, cada drone executa um rastreador matemático que prevê como ele deveria se mover com base no movimento passado e nos sensores embarcados, e então compara isso com o que o BeiDou informa. Diferenças incomuns levantam suspeitas. Paralelamente, três tipos de modelos de aprendizado buscam pistas: um foca em padrões nos próprios sinais de satélite, outro acompanha como o movimento evolui ao longo do tempo, e um terceiro examina as relações entre drones na formação. As saídas são combinadas em uma única pontuação de risco. Um modelo de linguagem especializado, treinado em logs de telemetria de drones, fornece uma verificação adicional quando a situação é incerta, ajudando a distinguir interferência hostil de variações normais como reflexões ou rajadas de vento.
Ensinando o enxame a reagir em conjunto
Detectar é apenas metade da história; o enxame também deve responder com sabedoria. Nesse framework, cada drone compartilha regularmente resumos compactos de sua posição, movimento e risco de spoofing com pares próximos. Cada drone então forma sua própria visão sobre quais vizinhos são confiáveis, dando menos peso àqueles que parecem suspeitos ou se comunicam de forma pouco confiável. Esse consenso ponderado por confiança molda como cada veículo ajusta sua velocidade e direção. Drones que parecem seguros ajudam a puxar a formação de volta ao alinhamento, enquanto drones suspeitos são efetivamente rebaixados, afastados ou tratados como obstáculos em movimento. O sistema também pode reatribuir papéis de “líder” para drones com baixo risco de spoofing e bons links de comunicação, preservando uma formação ordenada sem um controlador central.
Testando a ideia em um céu virtual
Como transmitir sinais de satélite falsos no mundo real é rigidamente regulamentado, a equipe construiu um simulador de software detalhado. Ele recria a geometria do BeiDou, ruído de sinal realista, reflexões urbanas e uma ampla gama de comportamentos de spoofing e jamming, incluindo drones renegados e múltiplos transmissores coordenados. Cada drone virtual carrega um receptor de satélite simulado e sensores de movimento, e executa sua própria cópia dos algoritmos de detecção e controle. Em dezenas de execuções de teste cobrindo diferentes formas de enxame, missões de voo e tipos de ameaça, o sistema identificou corretamente o spoofing em cerca de 97% dos casos, com pouquíssimos falsos positivos e tempo médio de reação inferior a três segundos. Mesmo durante ataques complexos, a trajetória do enxame normalmente desviou menos de cinco metros da rota pretendida, e quase todas as missões foram concluídas com sucesso.
O que isso significa para o uso cotidiano de drones
Em termos simples, este trabalho mostra que redes de drones cooperativos podem aprender a perceber quando sua “consciência de posição” está sendo adulterada, comunicar-se a respeito e ajustar a formação em voo para permanecerem seguras e úteis. A abordagem funciona com sensores padrão de satélite e movimento e foi projetada para operar de forma distribuída, de modo que pode ser adaptada a frotas reais usadas para entregas, inspeções ou resposta a emergências. Embora os resultados atuais venham de simulação e ainda dependam de computação embarcada relativamente potente, eles abrem um caminho para tornar enxames de drones muito mais resilientes em cidades e outros ambientes contestados onde a navegação confiável não pode ser dada como certa.
Citação: Tariq, U., Ahanger, T.A. & Shaukat, K. Tri-stream multi-model architecture for real-time detection of BeiDou signal manipulation in UAV swarms. Sci Rep 16, 15802 (2026). https://doi.org/10.1038/s41598-026-46655-y
Palavras-chave: Enxames de UAV, Falsificação de GNSS, Segurança do BeiDou, Navegação de drones, Ataques ciberfísicos