Clear Sky Science · zh
评估基于群体的多代理面向任务对话系统中的路由稳定性与协调性
更聪明的聊天机器人为何重要
在预订酒店、改签航班或向公司寻求帮助时,聊天机器人正迅速成为首个接触点。但一旦对话在任务之间切换——比如查找餐馆、查询火车时间并支付账单——现有系统常常出现摇摆不定的情况。本文深入研究由众多小型专用机器人和一个中央控制器组成的“群体式”助手,提出一个既简单又至关重要的问题:我们如何判断这种内部协作实际上是稳定且可靠的,而不仅仅是在表面上流畅?
多位助手,一个指挥者
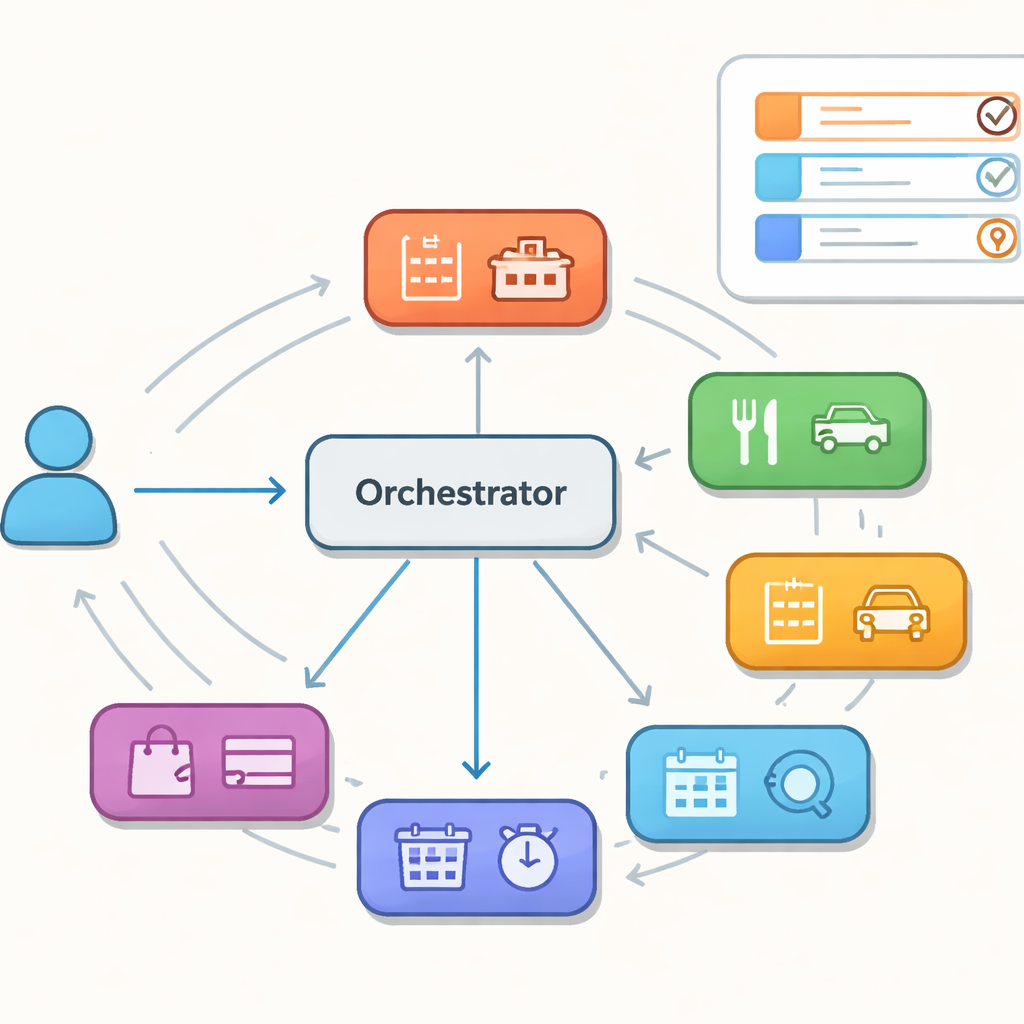
作者并非研究由单一大型模型处理一切的方案,而是考察由一系列专门代理组成的助手,每个代理擅长狭窄的领域,如酒店、餐馆或出租车。中央协调器逐回合决定下一个应由哪个专员来执行,并维护一份关于用户意图的共享记忆。这种有时被比作协作代理群的架构带来了灵活性和更易维护的优点。但它也引入了新的故障模式:控制器可能将回合分配给错误的专员、在多个代理间来回循环,或在切换控制权时未能保持共享记忆的一致性。这些隐藏的失误可能不会在单次回复中显现,但会破坏较长的对话流程。
衡量团队协作,而不仅是话语
为超越轶事式演示,作者在流行的多领域对话数据集 MultiWOZ 2.2 之上构建了一个“以评估为先”的流程。他们有意将两部分分离:用于选择专员的路由模型,以及生成系统动作并更新关于用户目标的共享信念的语言模型。通过解耦这两者,他们可以准确定位问题是源自错误的委派还是糟糕的语言生成。随后他们定义了以协调为中心的度量:所选专员是否与该回合的真实领域匹配、系统在填写诸如日期和地点等必要信息上取得了多少进展、系统切换或来回跳动的频率、是否陷入循环,以及在早期错误后恢复的效果如何。
让系统经受压力测试
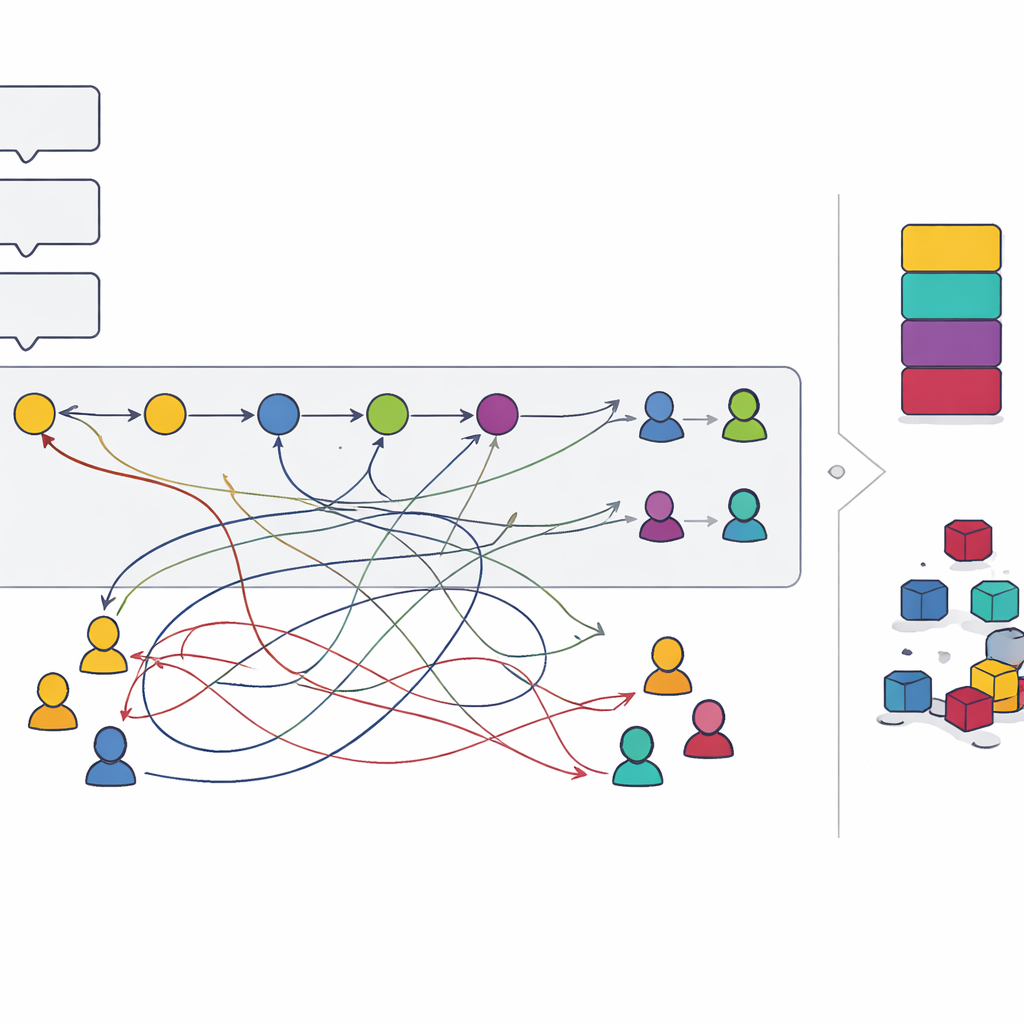
团队并不止于静态测试对话。他们引入了模拟现实摩擦的压力测试:用户改述请求、在多回合后更正早先信息,或工具响应迟缓。这些扰动保持原有任务不变,但干扰路由器所见的上下文,使研究者能够检验当现实偏离数据集中整洁注释脚本时协调机制的鲁棒性。他们还跟踪“级联错误”——即路由或状态跟踪上早期的小滑坡如何显著增加整个任务后续崩溃的概率,导致重要约束未被满足。
什么能让路由更稳定
作者以基于 DeBERTa 的模型作为路由器,FLAN-T5 作为生成器,比较了几种路由策略,包括简单规则和有无置信度保障的学习模型。一个关键发现是加入置信度感知的门控——只有在路由器足够确定时才采取行动,否则回退到更安全的行为——可显著减少不稳定的交接。在他们的主要设置中,路由准确率提升至约 0.77,同时代理间切换率下降,“弹跳”模式(系统在代理间来回振荡)几乎消失。与此同时,他们注意到过于保守会减少记录的有用状态更新量,暴露出在做出精确决定和稳步推进用户目标之间的矛盾。
为何这些教训具有普适性
为检验这些洞见的通用性,作者将相同的协调度量应用于另一个基准数据集 Schema-Guided Dialogue,该数据集具有不同的领域和模式。整体性能下降,但基本的协调问题依旧存在:错误路由和缺失的状态更新仍是主要罪魁祸首,而循环则相对罕见。这表明观察到的模式并非单一数据集的怪象,而反映了在长且不断变化的对话中协调多代理的更深层挑战。
这对未来助手意味着什么
对非专业人士来说,结论是:构建值得信赖的多技能聊天机器人,与其单纯训练更大的语言模型,不如更重视组织其内部的协同工作。本文提供了一个具体的蓝图和衡量标准,用于比较编排策略,展示早期路由决策、状态跟踪与交接行为如何共同决定对话是悄然偏离还是成功完成复杂任务。通过揭示准确性与进展之间的权衡,以及早期小错误如何可能滚雪球式放大,该工作为系统设计者提供了在将代理群部署到面向客户的关键环境前调优和监控的实用工具。
引用: Khan, A., Masood, F., Iqbal, A. et al. Evaluating routing stability and coordination in swarm-based multi-agent task-oriented dialogue systems. Sci Rep 16, 11813 (2026). https://doi.org/10.1038/s41598-026-42158-y
关键词: 多代理对话, 会话式人工智能, 面向任务的聊天机器人, 路由稳定性, 对话状态跟踪