Clear Sky Science · ru
Оценка стабильности маршрутизации и координации в системах многоагентного диалогового взаимодействия на основе роем»
Почему умные чатботы важны
Чатботы быстро превращаются в первую точку контакта при бронировании отеля, смене рейса или обращении в службу поддержки. Но как только разговор перескакивает между задачами — например, поиск ресторана, проверка расписания поезда и оплата счета — современные системы часто дают сбой. В этой статье авторы заглядывают под капот «роевых» ассистентов, составленных из множества небольших специализированных ботов под управлением центрального контроллера, и задают простой, но ключевой вопрос: как убедиться, что внутренняя совместная работа действительно стабильна и надежна, а не только поверхностно бегла?
Много помощников, один дирижёр
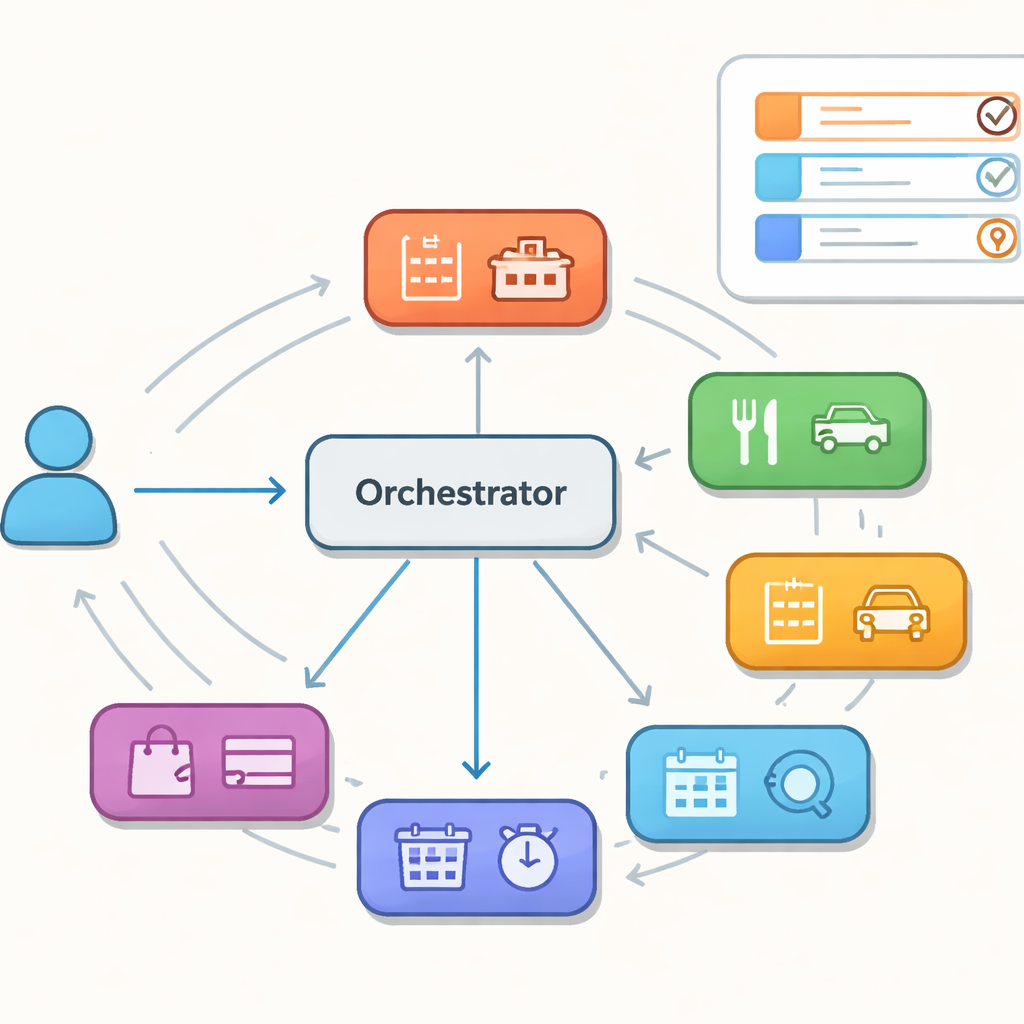
Вместо одной большой модели, решающей всё, авторы изучают ассистентов, построенных из набора специализированных агентов, каждый из которых силён в узкой области — отелей, ресторанов или такси. Центральный оркестратор решает по ходу диалога, какой специалист должен действовать следующим, и поддерживает общую память о потребностях пользователя. Эта схема, иногда сравниваемая с роем сотрудничающих агентов, обещает гибкость и облегчённое сопровождение. Вместе с тем она порождает новые типы сбоев: контроллер может направить ход не тому специалисту, зациклиться между агентами или не удержать согласованность общей памяти при смене контроля. Эти скрытые ошибки могут не проявляться в одном ответе, но способны сорвать более длинные беседы.
Измерять командную работу, а не только речь
Чтобы уйти дальше анекдотичных демонстраций, авторы создают «evaluation-first» конвейер поверх популярного многодоменного датасета MultiWOZ 2.2. Они сознательно разделяют две части: модель маршрутизации, которая выбирает специалиста, и языковую модель, генерирующую действия системы и обновляющую общую веру о целях пользователя. Разделив эти компоненты, можно точно определить, возникают ли проблемы из-за плохой делегации или из-за некачественной генерации текста. Авторы затем вводят метрики, сфокусированные на координации: соответствует ли выбранный специалист истинному домену в данном ходе, насколько система продвигается в заполнении необходимых деталей (даты, места и т. п.), как часто происходят переключения и «отбитые» возвраты между агентами, возникают ли петли и насколько хорошо система восстанавливается после ранних ошибок.
Нагрузка системы тестированием
Команда не ограничивается статическими тестовыми разговорами. Они вводят стресс-тесты, имитирующие реальные фрикции: переформулировки запросов пользователем, уточнение ранее переданной информации после множества ходов или замедленная работа инструментов. Эти возмущения сохраняют исходные задачи, но нарушают контекст, который видит маршрутизатор, позволяя исследователям проверить, насколько устойчива оркестровка, когда реальность расходится с аккуратно размеченными сценариями датасета. Они также отслеживают «каскадные ошибки» — ситуации, когда небольшая ранняя неточность в маршрутизации или отслеживании состояния существенно повышает вероятность того, что вся задача позднее развалится и важные ограничения останутся невыполненными.
Что делает маршрутизацию более стабильной
Используя модель маршрутизатора на основе DeBERTa и генератор на основе FLAN-T5, авторы сравнивают несколько политик маршрутизации: простые правила и обучаемые модели с и без механизмов, учитывающих уверенность. Ключевой вывод — добавление механизма контроля по уверенности (действовать только когда маршрутизатор достаточно уверен и в противном случае переходить к более безопасному поведению) резко уменьшает нестабильные передачи управления. В их основной конфигурации точность маршрутизации поднимается примерно до 0.77, при этом снижается частота переключений между агентами, а «отскочные» паттерны, где система колеблется туда-сюда, практически исчезают. В то же время они отмечают, что чрезмерная осторожность может уменьшать количество полезных обновлений состояния, выявляя напряжение между принятием точных решений и постепенным продвижением к цели пользователя.
Почему эти уроки универсальны
Чтобы проверить общность выводов, авторы применяют те же метрики оркестровки к другому бенчмарку — Schema-Guided Dialogue, который имеет другие домены и схемы. Производительность в целом падает, но основные проблемы координации сохраняются: ошибочная маршрутизация и пропущенные обновления состояния остаются главными виновниками, тогда как зацикливания встречаются относительно редко. Это указывает на то, что наблюдаемые закономерности не являются особенностями одного датасета, а отражают более глубокие сложности координации множества агентов в длинных и меняющихся беседах.
Что это значит для будущих ассистентов
Для неспециалистов вывод прост: создание надёжных многозадачных чатботов не столько о тренировке больших языковых моделей, сколько об организации их внутренней командной работы. Статья предлагает конкретную схему и эталон для сравнения стратегий оркестровки, показывая, как ранние решения маршрутизации, отслеживание состояния и поведение при передаче управления совместно определяют, свернёт ли разговор незаметно с курса или успешно завершит сложные задачи. Подчёркивая компромисс между точностью и прогрессом и демонстрируя, как малые ранние ошибки могут снежным комом привести к сбою, работа даёт дизайнерам систем практические инструменты для настройки и мониторинга роев агентов до их развёртывания в высокорисковых сервисах для пользователей.
Цитирование: Khan, A., Masood, F., Iqbal, A. et al. Evaluating routing stability and coordination in swarm-based multi-agent task-oriented dialogue systems. Sci Rep 16, 11813 (2026). https://doi.org/10.1038/s41598-026-42158-y
Ключевые слова: многоагентный диалог, разговорный ИИ, ориентированные на задачу чатботы, стабильность маршрутизации, отслеживание состояния диалога