Clear Sky Science · zh
大阵列亚毫米精度相干闪烁三维成像
以惊人细节感知深度
想象一台相机,它不仅能以三维方式观看世界,而且能以极高精度测量距离,从数十米外检测到比信用卡厚度还小的位移。这正是这项研究团队所构建的新型激光三维相机:将远程测距、极精细的深度分辨率和可扩展到更多像素的空间结合在一起。这样的工具可用于监测桥梁或建筑的微小位移、以数字形式保存脆弱的艺术品,并使虚拟现实场景更加逼真。

为什么测距如此困难
现代汽车、机器人和测绘系统越来越依赖 LiDAR(激光雷达),该方法将激光照射到场景并计时光返回的时间,从而构建三维图像。许多现有系统通过移动镜面来偏转窄激光束,这限制了速度和可靠性。无机械运动部件的固态方案正在出现,但它们仍面临权衡:通过电子方式偏转光束的设计难以扩展且扫描常常耗时,而高度灵敏的单光子探测器很难形成大规模、低噪声且具有细深度分辨率的阵列。传统的 CCD 芯片已经提供了大量像素,但在三维系统中它们通常依赖粗糙的计时技巧,只能将距离分辨到几厘米的量级。
将光与无线电结合的新方法
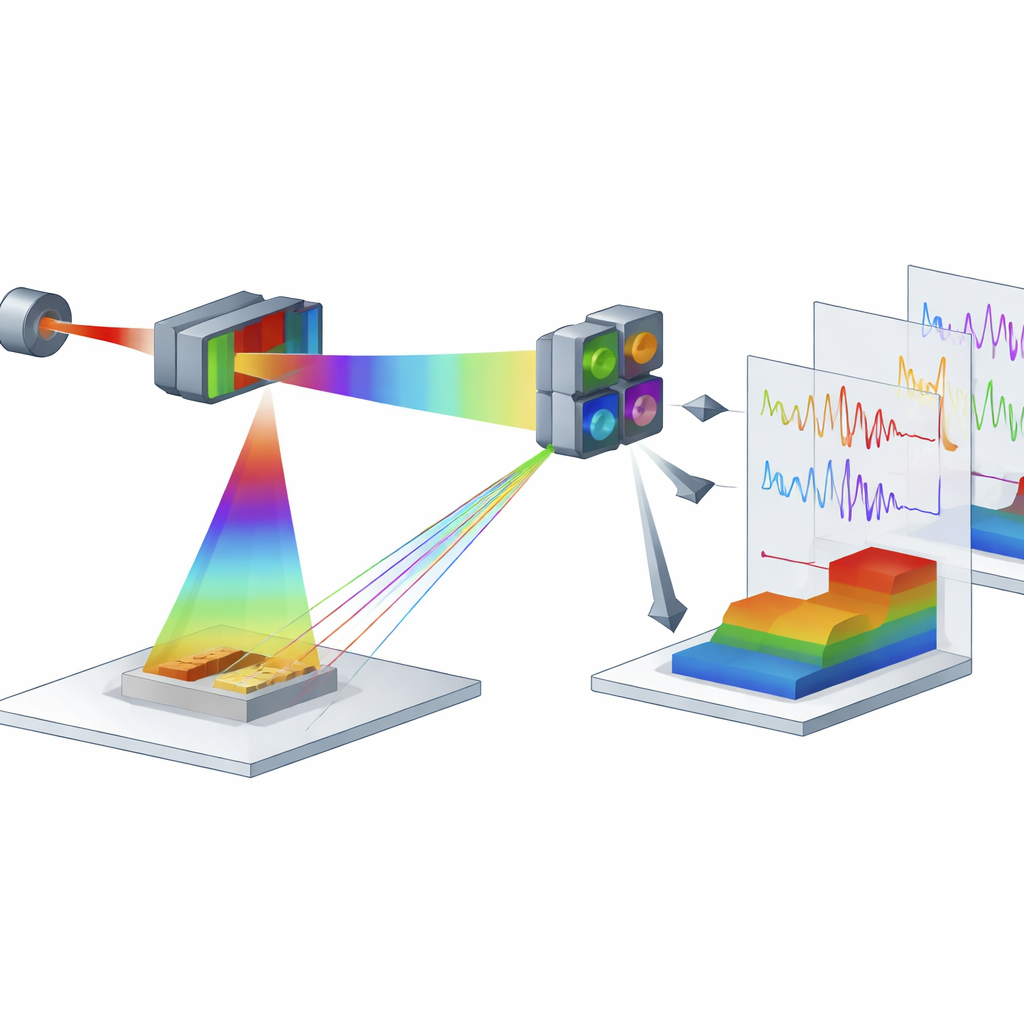
作者提出了一种不同的策略,将成熟的 CCD 技术与一种广泛用于高速光纤通信的相干探测技术相结合。他们不发射短脉冲激光,而是持续照射一束按无线电频率节奏调制亮度的激光,该频率随时间在许多相近频点上逐步扫描。部分调制光作为“探测光”照向场景,另一部分保留为“本地参考”。在接收端,一个光学组合器将从场景各点返回的微弱光与更强的参考光混合,并将结果送入四台同步工作的 CCD 相机,它们协同作为单一的“相干成像传感器”。在每个像素内,探测光和参考光的混合将距离编码为记录信号中的细微模式。
将闪烁变为三维图像
在一次完整的无线电频率扫掠期间,每个 CCD 像素在数千帧中记录一系列亮度值。单看这些原始图像基本看不到任何东西——返回光远弱于参考光。但当研究人员应用专门的处理算法时,他们从每个像素的信号中提取出极小的振荡分量。这种振荡的频率直接对应场景中该点到相机的距离。通过频率分析,系统将每个像素的时间轨迹转换为精确的距离测量,并将这些测量叠加成立体的三维地图。在对一个位于 30.5 米处的阶梯形目标的测试中,相机清晰分辨出仅 5 毫米高的台阶,并使用全部 320 × 256 像素重建了完整的三维表面。
测试真实场景并推动极限
为了展示系统在实际中的能力,团队对一个缩小的交通场景进行成像,该场景包含一辆车、一名行人和街道设施,距离同样为 30.5 米。仅使用数十毫瓦的光功率,系统就恢复出清晰的三维模型,其中单个物体、它们的阴影和毫米级特征均可辨。使用平面目标时,他们测得的深度精度仅为 0.47 毫米——至少比许多其他固态 LiDAR 设计优越十倍以上。他们还研究了随帧数变化的性能,发现速度与精度之间存在权衡:更快的采集带来较粗糙的深度,而更长的采集则使测量更清晰。当沿光路引入空气湍流时系统仍保持鲁棒性,通过缩短曝光时间还能重建横向以每秒高达 300 毫米速度移动的物体。
从雕像到未来的数字世界
除了测试图案,研究人员还用相机从八个观察角度扫描了一个半身胸像,每个角度距离均超过 30 米。通过将这些视角拼接,他们构建了一个可以从任意方向旋转和检查的栩栩如生的虚拟模型。由于该技术原则上可以在可见波段工作并与常规成像共享硬件,它为同时捕获详细彩色照片和超精确深度图的设备打开了可能。尽管今日原型受限于其 CCD 传感器的帧速率,更快的图像芯片和更智能的采样方案可大幅提高速度。简言之,这项工作表明,通过巧妙地将无线电式调制与熟悉的相机技术相结合,有可能在远距离以亚毫米级精度观察三维世界——这一进展对监测、制图和沉浸式数字体验具有深远影响。
引用: Wang, B., Tian, J., Wang, J. et al. Large-array sub-millimeter precision coherent flash three-dimensional imaging. Nat Commun 17, 2780 (2026). https://doi.org/10.1038/s41467-026-69188-4
关键词: 三维成像, 激光雷达, 深度测量, 相干探测, CCD 相机