Clear Sky Science · he
דימות תלת־ממדי קוהרנטי ברזולוציית תת־מילימטר במערך גדול
להבחין בעומק עם פירוט מדהים
דמיינו מצלמה שיכולה לא רק לראות את העולם בתלת־ממד, אלא למדוד מרחקים בדיוק כה גבוה שניתן לגילוי שינויים הקטנים מעובי כרטיס אשראי ממרחקים של עשרות מטרים. זה מה שהחוקרים שעומדים מאחורי העבודה הזאת בנו: סוג חדש של מצלמת לייזר תלת־ממדית שמשלבת טווח ארוך, דיוק עומק מאוד עדין, ופוטנציאל להרחבה למספר פיקסלים רב יותר. כלי כזה יכול לסייע במעקב אחרי הזיזות המזעריות בגשרים או מבנים, לשמר יצירות אמנות עדינות בצורה דיגיטלית, ולהפוך סצנות במציאות מדומה ליותר אמינות וחיות.

מדוע מדידת מרחק קשה כל כך
מכוניות מודרניות, רובוטים ומערכות מיפוי מסתמכים יותר ויותר על LiDAR, שיטה שמאירה בסיבי לייזר סצנה ומודדת כמה זמן לוקח להחזר האור כדי לבנות תמונה תלת־ממדית. מערכות רבות כיום מנווטות קרן לייזר צר בעזרת מראות נעות, מה שמגביל מהירות ואמינות. גישות מבוססות מצב מוצק ללא חלקים נעים צצות, אך עדיין מתמודדות עם פשרות: עיצובים שמנווטים קרניים אלקטרונית קשים להרחבה ולעתים לוקחים זמן רב לסריקה, בעוד גלאי פוטונים בודדים רגישים מתקשים ליצור מערכים גדולים עם רעש נמוך ודיוק עומק טוב. שבבי מצלמה מסורתיים, המכונים CCD, מציעים כבר היום מספר עצום של פיקסלים, אך כאשר משתמשים בהם במערכות 3D הם נשענים בדרך כלל על טריקים גסיים של תזמון שמגבילים רזולוציית המרחק לסנטימטרים בודדים.
דרך חדשה לשלב אור ורדיו
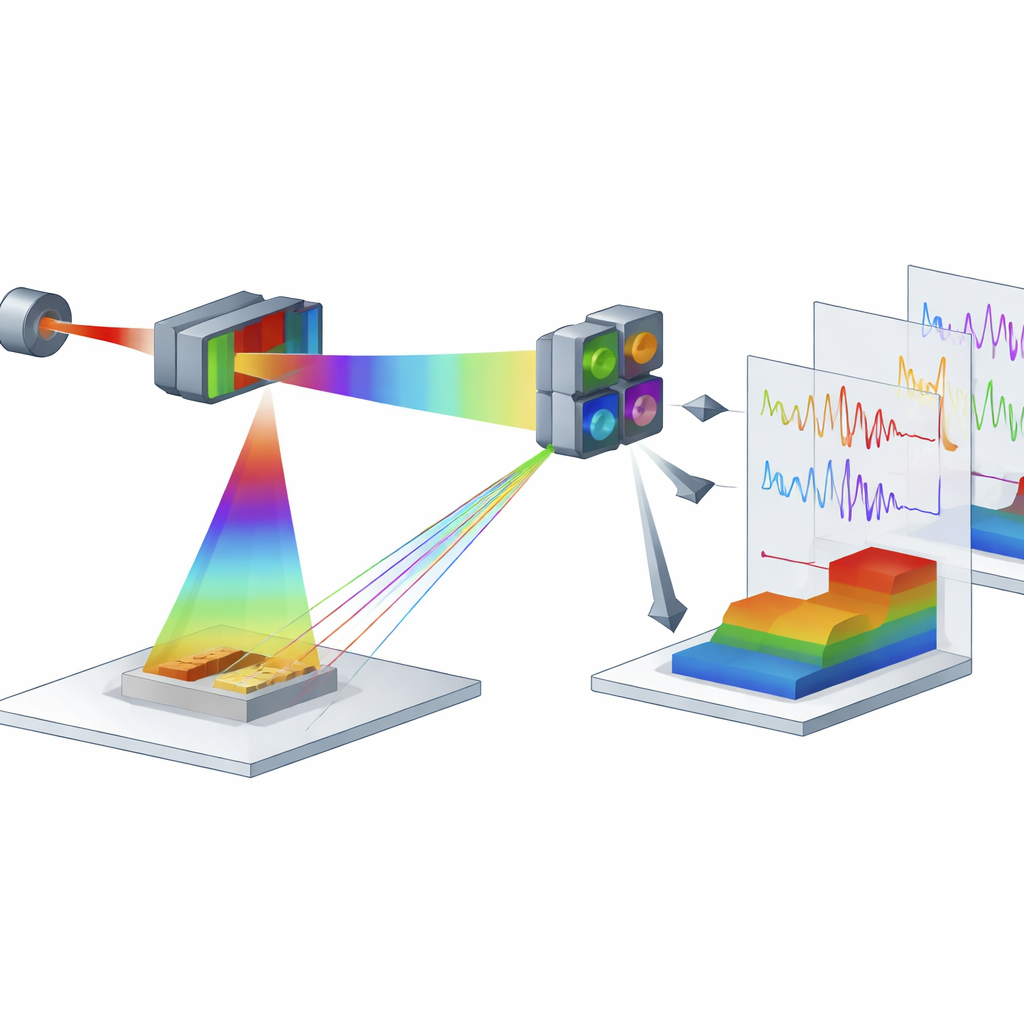
המחברים מציעים אסטרטגיה שונה שמשלבת את הבשלות של טכנולוגיית ה־CCD עם טכניקה הנקראת גילוי קוהרנטי, שמשומשת נרחב בתקשורת סיבים אופטיים במהירות גבוהה. במקום לשגר פולסים קצרים של לייזר, הם מאירים ברצף בלייזר שעוצמתו ממודלת בקצב רדיו־תדירותי שמחליף בין תדרים קרובים לאורך זמן. חלק מהאור הממוזג מוצא את הסצנה כ"פרוב", בעוד חלק אחר נשמר כ"הפניה מקומית". בקולטת האור, מערך אופטי משלב את האור החלש החוזר מכל נקודה בסצנה עם אור ההפניה החזק ומזין את התוצאה לארבע מצלמות CCD מסונכרנות שפועלות יחד כ"חיישן תמונה קוהרנטי" יחיד. בכל פיקסל, ערבוב הפרוב וההפניה מקודד את המרחק כדפוס עדין באות שנרשם.
להפוך הבזקים לתמונה תלת־ממדית
במהלך סיבוב מלא של תדרי הרדיו, כל פיקסל ב־CCD מקליט רצף של ערכי בהירות לאורך אלפי פריימים. בפני עצמם, התמונות הגולמיות כמעט ואינן מציגות דבר — האור החוזר חלש משמעותית מההפניה. אך כשהחוקרים מיישמים אלגוריתם עיבוד מותאם, הם מפיקים מרכיב מתנד בניסיון האות של כל פיקסל. תדירות התנודה הזו קשורה ישירות למרחק של אותה נקודה מהמצלמה. באמצעות ניתוח תדירותי, המערכת ממירה את רצף הזמן של כל פיקסל למדידת מרחק מדויקת, ומצרפת את המדידות הללו למפת 3D מפורטת. בניסויים עם מטרה בצורת מדרגות במרחק 30.5 מטר, המצלמה פתרה בבירור מדרגות בגובה של 5 מילימטר בלבד ושחזרה את המשטח המלא בתלת־ממד באמצעות כל 320 × 256 הפיקסלים.
בדיקת סצנות אמיתיות ודחיפת המגבלות
כדי להדגים את יכולת המערכת בפועל, הצוות צילם סצנת תנועה מיניאטורית שכללה רכב, הולך רגל ואביזרי רחוב באותו מרחק של 30.5 מטר. עם רק כמה עשרות מיליוואטים של עוצמה אופטי, המצלמה שחזרה מודל 3D חד שבו נראו עצמים בודדים, צללים ותכונות בקנה מידה מילימטרי. באמצעות מטרה שטוחה הם מדדו דיוק עומק של 0.47 מילימטר בלבד — לפחות עשר פעמים טוב יותר מרבים מעיצובי LiDAR במצב מוצק אחרים. הם גם חקרו כיצד הביצועים משתנים עם מספר הפריימים המשמשים, ומה שמופיע הוא פשרה בין מהירות ודיוק: לכידות מהירות נותנות עומק גס יותר, בעוד רכישות ארוכות מחדדות את המדידות. המערכת נשארה איתנה אפילו כאשר הוכנסו טורבלציות באוויר לאורך הנתיב האופטי, והיא יכלה לשחזר עצמים נעים לרוחב במהירות של עד 300 מילימטר לשנייה על ידי קיצור זמן החשיפה.
מפיסלות לעולמות דיגיטליים עתידיים
מעבר לדפוסי בדיקה, החוקרים השתמשו במצלמה שלהם לסרוק פסל ראש משמונה זויות צפייה, כל אחת במרחק של יותר מ־30 מטר. על ידי תפירת הצפיות הללו יחד, הם בנו מודל וירטואלי מציאותי שניתן לסובב ולחקור מכל כיוון. מאחר שהשיטה יכולה, בעקרון, לפעול באור הנראה ולשתף חומרה עם הדמיה רגילה, היא פותחת אפשרות למכשירים התופסים גם תמונות צבע מפורטות וגם מפות עומק מדויקות במיוחד במקביל. למרות שהפרוטוטיפ הנוכחי מוגבל על ידי קצב הפריימים של חיישני ה־CCD שלו, שבבי תמונה מהירים יותר ותוכניות דגימה חכמות יכולים להאיץ את המהירות באופן דרמטי. בפשטות, עבודה זו מראה שבשילוב חכם של מודולציה בסגנון רדיו עם טכנולוגיית מצלמה מוכרת, ניתן לראות את העולם התלת־ממדי לטווחים ארוכים עם דיוק תת־מילימטרי — התקדמות עם השלכות רחבות לעקיבה, מיפוי וחוויות דיגיטליות סוחפות.
ציטוט: Wang, B., Tian, J., Wang, J. et al. Large-array sub-millimeter precision coherent flash three-dimensional imaging. Nat Commun 17, 2780 (2026). https://doi.org/10.1038/s41467-026-69188-4
מילות מפתח: דימות 3D, LiDAR, חישה לעומק, גילוי קוהרנטי, מצלמות CCD