Clear Sky Science · ru
Коэрентная трехмерная съемка большой матрицей с субмиллиметровой точностью
Возможность видеть глубину с невероятной детализацией
Представьте камеру, которая не просто видит мир в трех измерениях, но и измеряет расстояния с такой точностью, что способна обнаруживать изменения меньше толщины кредитной карты с десятков метров. Именно такую систему создали авторы этой работы: новый вид лазерной 3D-камеры, сочетающей большую дальность, очень высокую точность по глубине и возможность масштабирования на значительно большее число пикселей. Такой инструмент может помочь отслеживать едва заметные смещения мостов или зданий, сохранять хрупкие произведения искусства в цифровом виде и делать сцены виртуальной реальности гораздо более правдоподобными.

Почему измерять расстояние так сложно
Современные автомобили, роботы и картографические системы всё чаще используют LiDAR — метод, при котором лазерный свет освещает сцену, а по времени возвращения сигнала строится трехмерная модель. Многие существующие системы направляют узкий лазерный луч с помощью движущихся зеркал, что ограничивает скорость и надежность. Безмеханические решения без движущихся частей появляются, но они по-прежнему сталкиваются с компромиссами: схемы с электронным управлением луча сложно масштабировать и они часто требуют длительного сканирования, тогда как сверхчувствительные одноп فوتонные детекторы трудно реализовать в больших низкошумных матрицах с высокой точностью по глубине. Обычные ПЗС-чипы уже предлагают огромное число пикселей, но в 3D-системах их обычно используют с примитивными временными трюками, которые разрешают расстояния лишь с погрешностью в несколько сантиметров.
Новый способ сочетать свет и радиосигнал
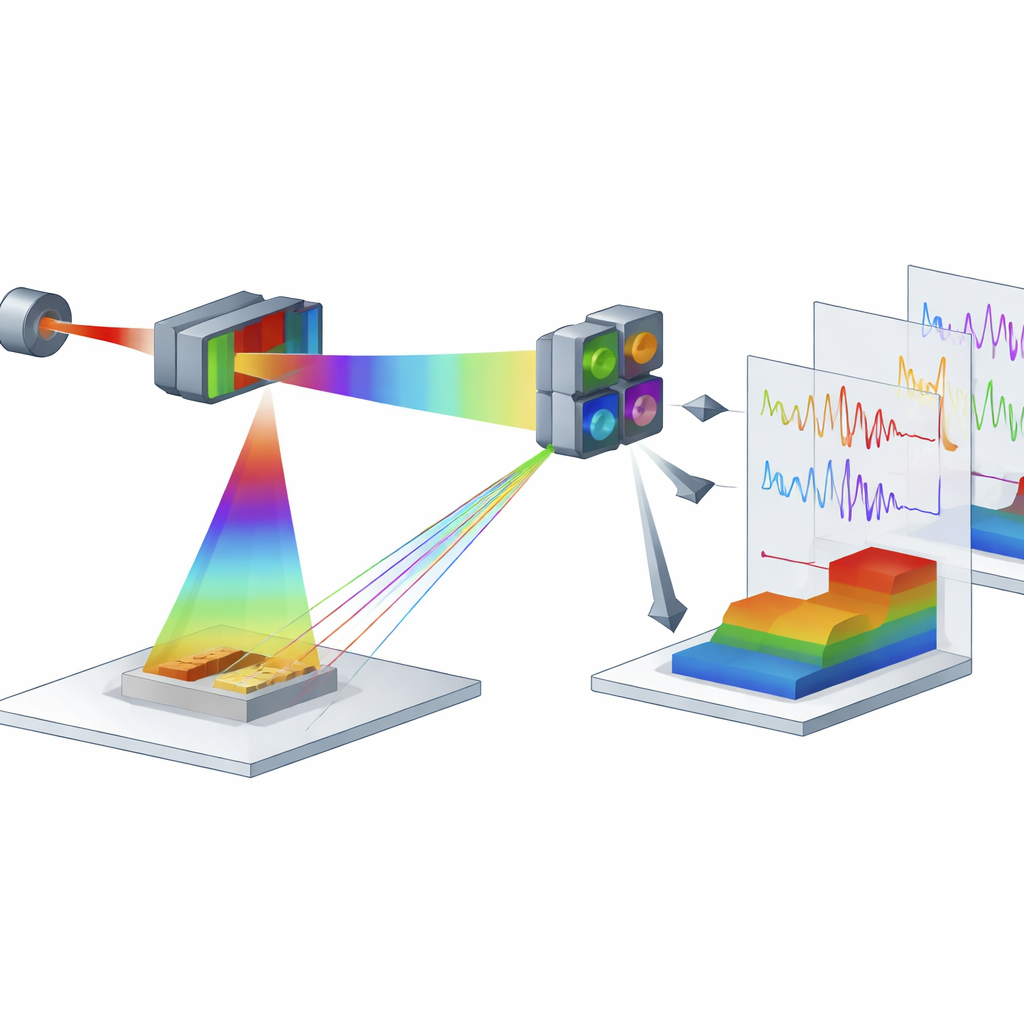
Авторы предлагают иную стратегию, которая объединяет зрелость ПЗС-технологии с техникой, известной как коэрентное обнаружение, широко применяемой в высокоскоростной волоконно-оптической связи. Вместо того чтобы посылать короткие лазерные импульсы, они непрерывно освещают сцену лазером, яркость которого ритмически модулируется радиочастотным сигналом, последовательно перебирающим множество близко расположенных частот. Часть этой модулированной световой энергии служит «зондом», освещая сцену, а другая часть удерживается как «локальный эталон». На приёме оптическая система смешивает слабый свет, возвращающийся от каждой точки сцены, с более мощным эталонным светом и подаёт результат на четыре синхронизированные ПЗС-камеры, которые вместе функционируют как единый «коэрентный сенсор изображения». В каждом пикселе смешение зонда и эталона кодирует расстояние в виде тонкого узора в зафиксированном сигнале.
Преобразование мерцаний в 3D-изображение
В течение одного полного прохода радиочастотной перестройки каждый ПЗС-пиксель записывает последовательность значений яркости на тысячах кадров. По отдельности эти сырые изображения почти ничего не показывают — возвращаемый свет заметно слабее эталона. Но применив специальный алгоритм обработки, исследователи вычленяют крошечную осциллирующую компоненту в сигнале каждого пикселя. Частота этой осцилляции напрямую связана с тем, как далеко находится соответствующая точка сцены от камеры. Проведя частотный анализ, система превращает временной след каждого пикселя в точное измерение расстояния и собирает эти измерения в подробную трехмерную карту. В тесте с лестницей, расположенной на 30,5 метра, камера чётко разрешила ступени высотой всего 5 миллиметров и восстановила всю поверхность в трех измерениях, используя все 320 × 256 пикселей.
Испытания реальных сцен и пределы возможностей
Чтобы продемонстрировать практические возможности системы, команда сфотографировала миниатюрную уличную сцену с автомобилем, пешеходом и уличными элементами на том же расстоянии 30,5 метра. При оптической мощности всего в несколько десятков милливатт камера восстановила чёткую 3D-модель, где были видны отдельные объекты, их тени и детали размером в миллиметры. По плоскому эталону они измерили точность по глубине всего 0,47 мм — по крайней мере в десять раз лучше, чем у многих других безмеханических LiDAR-конфигураций. Также изучили, как меняется производительность в зависимости от числа кадров, обнаружив компромисс между скоростью и точностью: более быстрые съёмки дают грубую глубину, а более долгие накопления улучшают измерения. Система оставалась работоспособной даже при введённой турбулентности воздуха вдоль оптического тракта, и она могла реконструировать объекты, движущиеся вбок со скоростью до 300 миллиметров в секунду, уменьшая время экспозиции.
От статуй до будущих цифровых миров
Помимо тестовых мишеней, исследователи использовали камеру для сканирования бюста из восьми углов обзора, каждый более чем на 30 метров. Сшив эти виды вместе, они создали реалистичную виртуальную модель, которую можно поворачивать и изучать с любой стороны. Поскольку метод, по сути, может работать в видимом диапазоне и использовать общее аппаратное обеспечение с обычной съемкой, он открывает возможность создания устройств, которые одновременно захватывают подробные цветные фотографии и сверхточные карты глубины. Хотя нынешний прототип ограничен частотой кадров его ПЗС-датчиков, более быстрые матрицы и более умные схемы выборки могут значительно увеличить скорость. Проще говоря, эта работа показывает, что, умело сочетая радиомодуляцию и знакомую камеру, можно видеть трехмерный мир на дальнем расстоянии с субмиллиметровой точностью — прогресс с далеко идущими последствиями для мониторинга, картографии и иммерсивных цифровых приложений.
Цитирование: Wang, B., Tian, J., Wang, J. et al. Large-array sub-millimeter precision coherent flash three-dimensional imaging. Nat Commun 17, 2780 (2026). https://doi.org/10.1038/s41467-026-69188-4
Ключевые слова: 3D-изображение, LiDAR, измерение глубины, коэрентное обнаружение, ПЗС-камеры