Clear Sky Science · es
Imagen tridimensional coherente de destello con precisión submilimétrica en arreglos grandes
Ver la profundidad con detalle increíble
Imagínese una cámara que no solo vea el mundo en tres dimensiones, sino que mida distancias con tanta precisión que detecte cambios menores que el grosor de una tarjeta de crédito a decenas de metros de distancia. Esto es lo que han construido los investigadores detrás de este trabajo: un nuevo tipo de cámara 3D basada en láser que combina largo alcance, precisión de profundidad muy fina y capacidad para escalar a muchos más píxeles. Una herramienta así podría ayudar a vigilar pequeños desplazamientos en puentes o edificios, preservar obras de arte delicadas en formato digital y hacer que escenas de realidad virtual sean mucho más realistas.

Por qué es tan difícil medir distancias
Los coches modernos, los robots y los sistemas de cartografía dependen cada vez más del LiDAR, un método que ilumina una escena con un láser y mide el tiempo que tarda en volver para construir una imagen 3D. Muchos sistemas actuales dirigen un haz láser estrecho con espejos móviles, lo que limita la velocidad y la fiabilidad. Surgen enfoques en estado sólido sin piezas móviles, pero aún afrontan compromisos: los diseños que dirigen haces electrónicamente pueden ser difíciles de escalar y a menudo tardan mucho tiempo en escanear, mientras que detectores de fotones únicos muy sensibles tienen problemas para formar matrices grandes y de bajo ruido con alta precisión de profundidad. Los chips de cámara convencionales, conocidos como CCD, ya ofrecen un número enorme de píxeles, pero cuando se usan en sistemas 3D normalmente recurren a trucos de temporización groseros que solo resuelven distancias con una precisión de centímetros.
Una nueva manera de usar luz y radio juntas
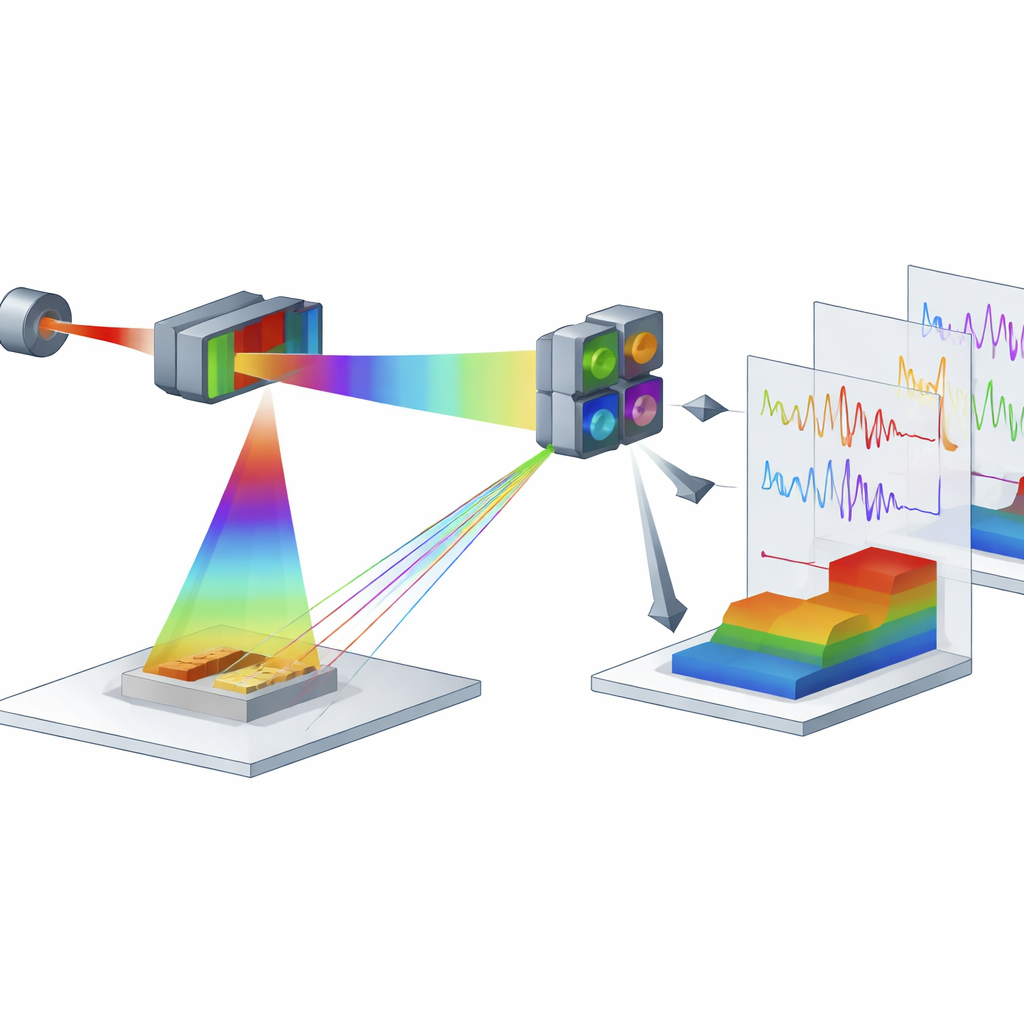
Los autores presentan una estrategia diferente que combina la madurez de la tecnología CCD con una técnica conocida como detección coherente, ampliamente usada en comunicaciones por fibra óptica de alta velocidad. En lugar de disparar pulsos láser cortos, iluminan continuamente con un láser cuya intensidad se modula rítmicamente mediante una señal de radiofrecuencia que recorre muchas frecuencias cercanas en el tiempo. Parte de esa luz modulada inunda la escena como una "sonda", mientras que otra parte se mantiene como una "referencia local". En el receptor, un montaje óptico combina la débil luz que regresa de cada punto de la escena con la luz de referencia más intensa y alimenta el resultado a cuatro cámaras CCD sincronizadas que actúan en conjunto como un único "sensor de imagen coherente". En cada píxel, la mezcla de sonda y referencia codifica la distancia como un patrón sutil en la señal registrada.
Convertir parpadeos en una imagen 3D
Durante una barrida completa de frecuencias de radio, cada píxel CCD registra una secuencia de valores de brillo a lo largo de miles de fotogramas. Por sí solas, estas imágenes crudas casi no muestran nada: la luz que regresa es mucho más débil que la referencia. Pero cuando los investigadores aplican un algoritmo de procesamiento a medida, extraen un pequeño componente oscilante en la señal de cada píxel. La frecuencia de esa oscilación resulta estar directamente relacionada con la distancia entre ese punto de la escena y la cámara. Al realizar un análisis de frecuencia, el sistema convierte la traza temporal de cada píxel en una medida de distancia precisa, apilando estas medidas en un mapa 3D detallado. En pruebas con un objetivo en forma de escalera a 30,5 metros, la cámara resolvió claramente peldaños de solo 5 milímetros de altura y reconstruyó la superficie completa en tres dimensiones usando los 320 × 256 píxeles.
Probar escenas reales y empujar los límites
Para demostrar lo que el sistema puede hacer en la práctica, el equipo imagenó una escena de tráfico en miniatura con un coche, un peatón y elementos de calle a la misma distancia de 30,5 metros. Con solo unas decenas de miliavatios de potencia óptica, la cámara recuperó un modelo 3D nítido donde eran visibles objetos individuales, sus sombras y características a escala milimétrica. Usando un objetivo plano, midieron una precisión de profundidad de apenas 0,47 milímetros, al menos diez veces mejor que muchos otros diseños LiDAR en estado sólido. También exploraron cómo cambia el rendimiento con el número de fotogramas usados, encontrando un compromiso entre velocidad y precisión: capturas más rápidas dan profundidad más aproximada, mientras que adquisiciones más largas afinan las medidas. El sistema se mantuvo robusto incluso cuando se introdujo turbulencia del aire a lo largo del camino óptico, y pudo reconstruir objetos que se movían lateralmente a hasta 300 milímetros por segundo al acortar el tiempo de exposición.
De estatuas a futuros mundos digitales
Más allá de patrones de prueba, los investigadores usaron su cámara para escanear un busto escultórico desde ocho ángulos de visión, cada uno a más de 30 metros de distancia. Al coser estas vistas, construyeron un modelo virtual realista que puede rotarse y examinarse desde cualquier dirección. Dado que la técnica puede, en principio, funcionar en longitudes de onda visibles y compartir hardware con la imagen convencional, abre la puerta a dispositivos que capturen simultáneamente fotografías en color detalladas y mapas de profundidad ultra precisos. Aunque el prototipo actual está limitado por la tasa de fotogramas de sus sensores CCD, chips de imagen más rápidos y esquemas de muestreo más inteligentes podrían aumentar la velocidad de forma drástica. En términos sencillos, este trabajo muestra que, combinando inteligentemente la modulación al estilo radio con tecnología de cámara familiar, es posible ver el mundo 3D a larga distancia con precisión submilimétrica, un avance con profundas implicaciones para vigilancia, cartografía y experiencias digitales inmersivas.
Cita: Wang, B., Tian, J., Wang, J. et al. Large-array sub-millimeter precision coherent flash three-dimensional imaging. Nat Commun 17, 2780 (2026). https://doi.org/10.1038/s41467-026-69188-4
Palabras clave: Imágenes 3D, LiDAR, detección de profundidad, detección coherente, cámaras CCD