Clear Sky Science · pl
Trójwymiarowe obrazowanie spójne z dużej matrycy o precyzji sub-milimetrowej
Widzenie głębi z niesamowitą szczegółowością
Wyobraź sobie kamerę, która nie tylko rejestruje świat w trzech wymiarach, lecz mierzy odległości tak precyzyjnie, że wykrywa zmiany mniejsze niż grubość karty kredytowej z odległości kilkudziesięciu metrów. To właśnie zbudowali autorzy tej pracy: nowy typ laserowej kamery 3D, łączący duży zasięg, bardzo wysoką dokładność pomiaru głębokości oraz możliwość skalowania do znacznie większej liczby pikseli. Takie narzędzie mogłoby pomóc w monitorowaniu drobnych przesunięć mostów lub budynków, zachowywaniu delikatnych dzieł sztuki w formie cyfrowej oraz uczynieniu scen wirtualnej rzeczywistości znacznie bardziej realistycznymi.

Dlaczego mierzenie odległości jest takie trudne
Nowoczesne samochody, roboty i systemy mapowania coraz częściej polegają na LiDAR-ze — metodzie, która oświetla scenę laserem i mierzy czas powrotu sygnału, budując obraz 3D. Wiele obecnych systemów kieruje wąską wiązkę lasera za pomocą ruchomych lusterek, co ogranicza prędkość i niezawodność. Pojawiają się rozwiązania bez ruchomych części, ale wciąż wymagają kompromisów: projekty elektronicznego skanowania są trudne do skalowania i często potrzebują dużo czasu na skanowanie, podczas gdy wysoce czułe detektory pojedynczych fotonów mają problemy z tworzeniem dużych, niskoszumowych matryc o dobrej dokładności głębokości. Konwencjonalne chipy kamerowe znane jako CCD oferują już ogromną liczbę pikseli, lecz w systemach 3D zwykle opierają się na prymitywnych sztuczkach czasowych, które rozdzielają odległości tylko z dokładnością do kilku centymetrów.
Nowy sposób łączenia światła i radia
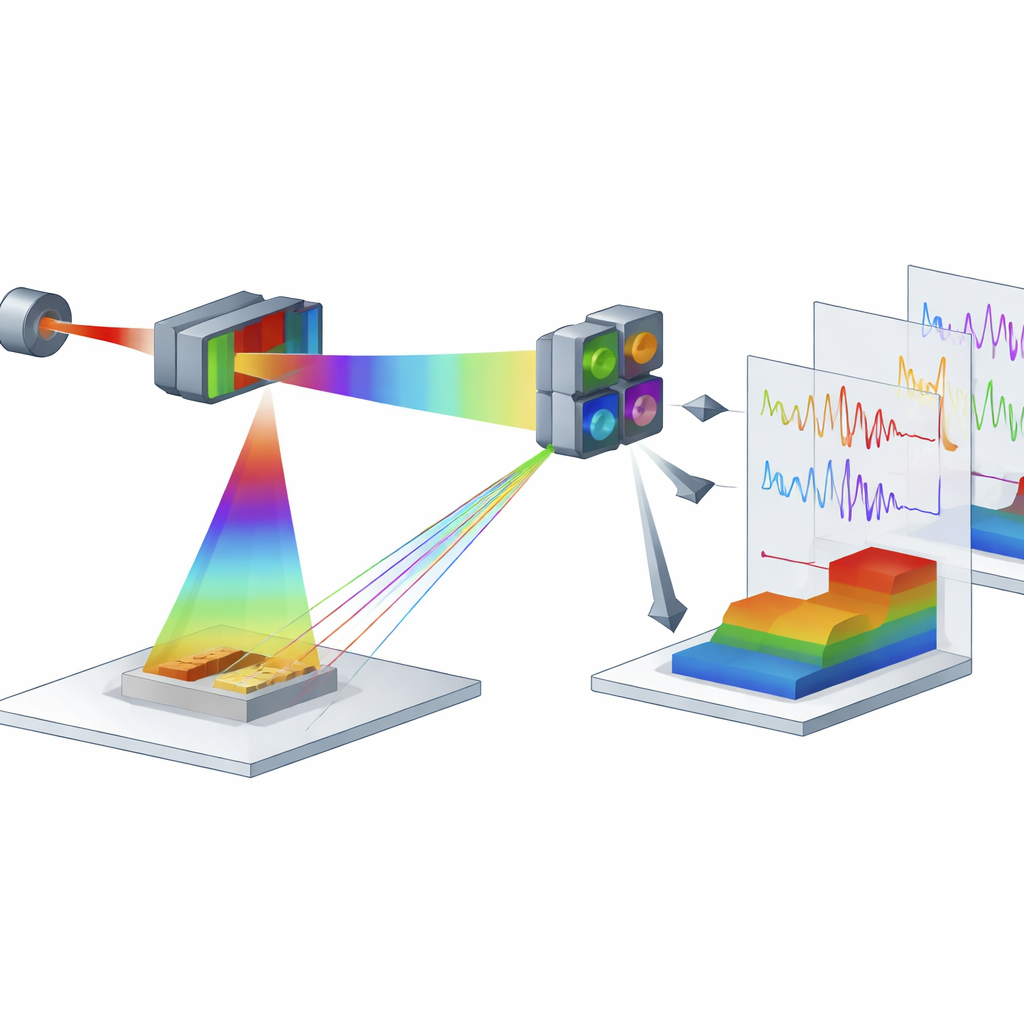
Autorzy proponują inną strategię, łącząc dojrzałość technologii CCD z techniką znaną jako detekcja koherentna, szeroko stosowaną w szybkich łączach światłowodowych. Zamiast wysyłać krótkie impulsy laserowe, ciągle oświetlają scenę laserem, którego jasność jest rytmicznie modulowana sygnałem radiowym przechodzącym przez wiele gęsto rozmieszczonych częstotliwości w czasie. Część tej modulowanej wiązki pada na scenę jako „sonda”, a inna część pozostaje jako „lokalny wzorzec”. Na odbiorze optyczny układ miesza słaby powracający sygnał z mocniejszym wzorcem i kieruje rezultat do czterech zsynchronizowanych kamer CCD, które działają razem jak pojedynczy „czujnik obrazu koherentnego”. W każdym pikselu mieszanie sondy i wzorca koduje odległość jako subtelny wzór w zarejestrowanym sygnale.
Przekształcanie migotania w obraz 3D
Podczas jednego pełnego przemiatania częstotliwości radiowych każdy piksel CCD rejestruje ciąg wartości jasności przez tysiące klatek. Same surowe obrazy niewiele pokazują — powracające światło jest znacznie słabsze od wzorca. Gdy jednak badacze zastosowali dopasowany algorytm przetwarzania, wydobyli z sygnału każdego piksela niewielką składową oscylacyjną. Częstotliwość tej oscylacji okazuje się być bezpośrednio powiązana z odległością punktu od kamery. Dzięki analizie częstotliwości system przekształca ślad czasowy każdego piksela w dokładny pomiar odległości, łącząc te pomiary w szczegółową mapę 3D. W testach na celu w kształcie schodów z odległości 30,5 metra kamera wyraźnie rozróżniła stopnie o wysokości zaledwie 5 milimetrów i odtworzyła całą powierzchnię w trzech wymiarach używając wszystkich 320 × 256 pikseli.
Testowanie rzeczywistych scen i przesuwanie granic
Aby pokazać praktyczne możliwości systemu, zespół obrazował miniaturową scenę uliczną z samochodem, pieszym i elementami ulicznymi w tej samej odległości 30,5 metra. Przy zaledwie kilkudziesięciu miliwatach mocy optycznej kamera odtworzyła wyraźny model 3D, w którym widoczne były poszczególne obiekty, ich cienie oraz cechy o skali milimetrowej. Na płaskim celu zmierzyli precyzję głębokości na poziomie zaledwie 0,47 milimetra — przynajmniej dziesięć razy lepiej niż wiele innych projektów LiDAR bez ruchomych części. Zbadali także, jak wydajność zmienia się w zależności od liczby użytych klatek, znajdując kompromis między szybkością a precyzją: szybsze przechwyty dają mniej dokładną głębokość, podczas gdy dłuższe akwizycje ją wyostrzają. System pozostał odporny nawet przy wprowadzeniu turbulencji powietrza wzdłuż toru optycznego i potrafił odtworzyć obiekty poruszające się bocznie z prędkością do 300 milimetrów na sekundę poprzez skrócenie czasu ekspozycji.
Od posągów do przyszłych światów cyfrowych
Ponad wzorcami testowymi, badacze użyli swojej kamery do skanowania popiersia rzeźby z ośmiu kątów obserwacji, każdy z ponad 30 metrów odległości. Sklejając te widoki, zbudowali realistyczny model wirtualny, który można obracać i badać z dowolnej strony. Ponieważ technika może w zasadzie działać przy długościach fal widzialnych i dzielić sprzęt z normalnym obrazowaniem, otwiera drogę do urządzeń rejestrujących jednocześnie szczegółowe zdjęcia kolorowe i ultradokładne mapy głębokości. Choć prototyp obecnie ograniczają prędkości klatek sensorów CCD, szybsze układy obrazujące i inteligentniejsze schematy próbkowania mogą znacząco zwiększyć szybkość. W prostych słowach, praca ta pokazuje, że dzięki sprytnemu połączeniu modulacji w stylu radiowym ze znaną technologią kamerową można zobaczyć świat 3D na dużych odległościach z dokładnością sub-milimetrową — postęp o dalekosiężnych konsekwencjach dla monitoringu, mapowania i immersyjnych doświadczeń cyfrowych.
Cytowanie: Wang, B., Tian, J., Wang, J. et al. Large-array sub-millimeter precision coherent flash three-dimensional imaging. Nat Commun 17, 2780 (2026). https://doi.org/10.1038/s41467-026-69188-4
Słowa kluczowe: Obrazowanie 3D, LiDAR, pomiar głębokości, detekcja koherentna, kamery CCD