Clear Sky Science · sv
Storskalig matris för koherent 3D-avbildning med submillimeterprecision
Se djup med otrolig detaljrikedom
Föreställ dig en kamera som inte bara ser världen i tre dimensioner utan också mäter avstånd med så hög precision att den kan upptäcka förändringar som är mindre än tjockleken på ett kreditkort från tiotals meters avstånd. Det är vad forskarna bakom det här arbetet har byggt: en ny typ av laserbaserad 3D-kamera som kombinerar lång räckvidd, mycket fin djupnoggrannhet och potential att skalas upp till många fler pixlar. Ett sådant verktyg kan hjälpa till att övervaka små förskjutningar i broar eller byggnader, bevara ömtåliga konstverk i digital form och göra virtuella verkligheter mycket mer levande.

Varför det är så svårt att mäta avstånd
Moderna bilar, robotar och kartläggningssystem förlitar sig i allt högre grad på LiDAR, en metod som belyser en scen med laserljus och mäter hur lång tid det tar för ljuset att studsa tillbaka för att skapa en 3D-bild. Många nuvarande system styr en smal laserstråle med rörliga speglar, vilket begränsar hastighet och tillförlitlighet. Solid-state-lösningar utan rörliga delar börjar dyka upp, men de står fortfarande inför kompromisser: konstruktioner som styr strålar elektroniskt kan vara svåra att skala upp och tar ofta lång tid att skanna, medan mycket känsliga enkel-fotondetektorer har svårt att formas till stora, lågbrusiga matriser med fin djupprecision. Konventionella kamerachip som kallas CCD erbjuder redan enorma mängder pixlar, men när de används i 3D-system förlitar de sig ofta på grova tidsmässiga knep som bara löser avstånd till inom några centimeter.
Ett nytt sätt att kombinera ljus och radio
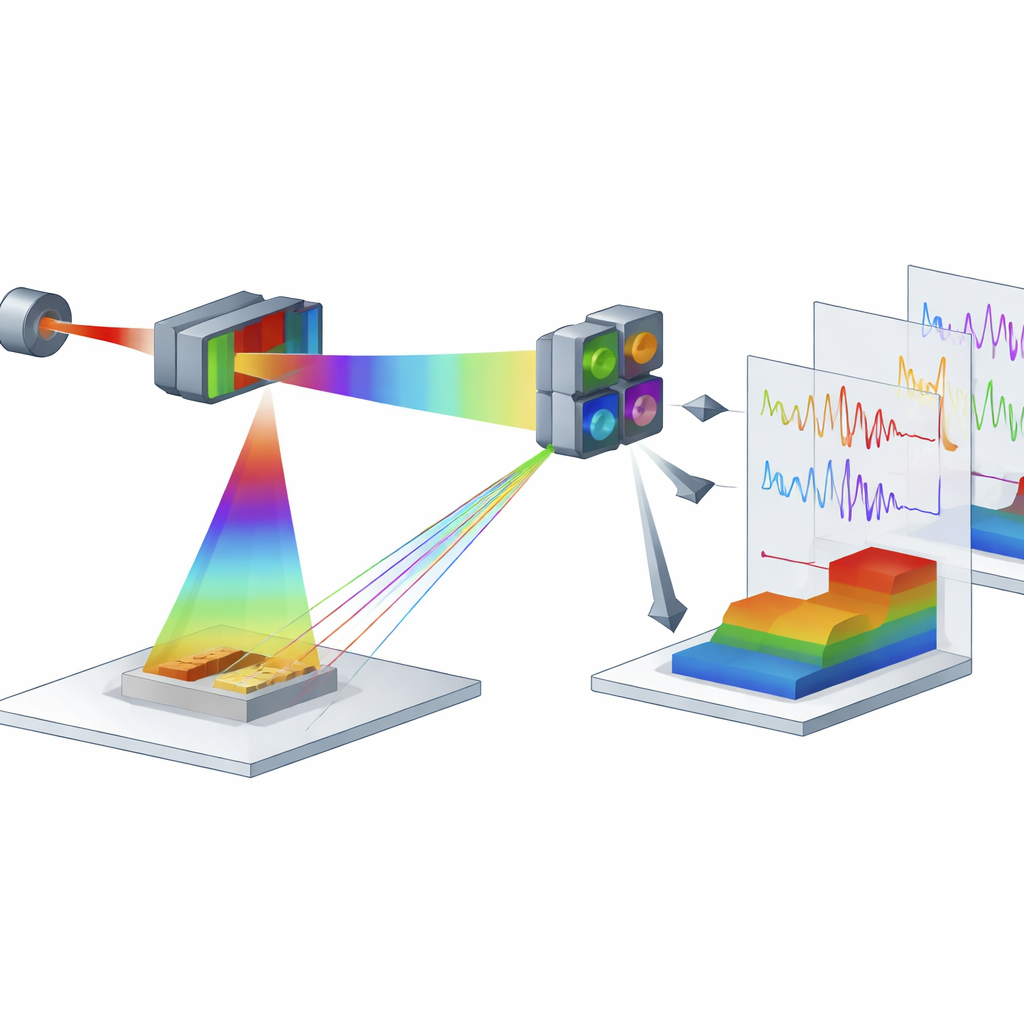
Författarna presenterar en annan strategi som förenar CCD-teknikens mognad med en teknik känd som koherent detektion, vida använd inom hög-hastighets fiberoptisk kommunikation. Istället för att skjuta korta laserpulser kontinuerligt lyser man med en laser vars intensitet rytmiskt styrs av en radiosignal som stegvis sveper genom många tätt liggande frekvenser över tid. En del av detta modulerade ljus öser över scenen som en "probe" medan en annan del hålls som en "lokal referens." Vid mottagaren kombinerar en optisk uppsättning det svaga ljuset som återvänder från varje punkt i scenen med det starkare referensljuset och matar resultatet in i fyra synkroniserade CCD-kameror som tillsammans fungerar som en enda "koherent bildsensor." Inom varje pixel kodar blandningen av probe och referens avstånd som ett subtilt mönster i den inspelade signalen.
Göra flimrande signaler till en 3D-bild
Under en hel svepning av radiosignalen spelar varje CCD-pixel in en sekvens ljusstärkesvärden över tusentals ramar. För sig visar dessa råbilder nästan ingenting—det återvändande ljuset är mycket svagare än referensen. Men när forskarna använder en skräddarsydd bearbetningsalgoritm plockar de fram en liten oscillerande komponent i varje pixels signal. Frekvensen hos denna svängning visar sig vara direkt kopplad till hur långt den punkten i scenen ligger från kameran. Genom att köra en frekvensanalys omvandlar systemet varje pixels tidsserie till en noggrann avståndsmätning och staplar dessa mätningar till en detaljerad 3D-karta. I tester med ett trappstegsformat mål på 30,5 meters avstånd löste kameran tydligt steg som bara var 5 millimeter höga och rekonstruerade hela ytan i 3D med alla 320 × 256 pixlar.
Test av verkliga scener och att tänja på gränserna
För att visa vad systemet kan göra i praktiken avbildade teamet en miniatyr trafikscen med en bil, en fotgängare och gatuelement på samma 30,5 meters avstånd. Med bara några tiotals milliwatt optisk effekt återvann kameran en skarp 3D-modell där individuella objekt, deras skuggor och millimeternoggranna detaljer var synliga. Med ett plant mål mätte de en djupprecision på bara 0,47 millimeter—minst tio gånger bättre än många andra solid-state LiDAR-konstruktioner. De undersökte också hur prestandan förändras med antalet använda ramar och fann en avvägning mellan hastighet och precision: snabbare inspelningar ger grövre djup, medan längre förvärv förfinar mätningarna. Systemet förblev robust även när luftturbulens introducerades längs den optiska banan, och det kunde rekonstruera objekt som rörde sig sidledes med upp till 300 millimeter per sekund genom att förkorta exponeringstiden.
Från statyer till framtida digitala världar
Bortom testmönster använde forskarna sin kamera för att skanna ett bystporträtt ur åtta synvinklar, varje på mer än 30 meters avstånd. Genom att sy samman dessa vyer byggde de en livfull virtuell modell som kan roteras och undersökas från vilket håll som helst. Eftersom tekniken i princip kan fungera vid synliga våglängder och dela hårdvara med vanlig fotografering öppnar den dörren för enheter som fångar både detaljerade färgfoton och ultraprecisa djuppkartor samtidigt. Även om dagens prototyp begränsas av CCD-sensorernas bildfrekvens kan snabbare bildchip och smartare provtagningsscheman öka hastigheten dramatiskt. I enkla termer visar detta arbete att genom att skickligt kombinera radio-liknande modulering med välbekant kamerateknik är det möjligt att se den tredimensionella världen på långt håll med submillimeternoggrannhet—en framgång med långtgående konsekvenser för övervakning, kartläggning och immersiva digitala upplevelser.
Citering: Wang, B., Tian, J., Wang, J. et al. Large-array sub-millimeter precision coherent flash three-dimensional imaging. Nat Commun 17, 2780 (2026). https://doi.org/10.1038/s41467-026-69188-4
Nyckelord: 3D-avbildning, LiDAR, djupsensorer, koherent detektion, CCD-kameror