Clear Sky Science · de
Großflächige kohärente Drei‑Dimensional‑Bildgebung im Sub‑Millimeter‑Bereich
Tiefe mit erstaunlicher Detailgenauigkeit sehen
Stellen Sie sich eine Kamera vor, die nicht nur die Welt dreidimensional erfasst, sondern Entfernungen so präzise misst, dass sie Veränderungen erkennt, die kleiner sind als die Dicke einer Kreditkarte — aus Dutzenden Metern Entfernung. Genau das haben die Forschenden hinter dieser Arbeit gebaut: eine neue Art laserbasierter 3D‑Kamera, die große Reichweite, sehr feine Tiefengenauigkeit und Spielraum zum Hochskalieren auf viel mehr Pixel vereint. Ein solches Werkzeug könnte helfen, winzige Verschiebungen an Brücken oder Gebäuden zu überwachen, empfindliche Kunstwerke digital zu bewahren und virtuelle Realitäten deutlich lebensechter zu machen.

Warum Distanzmessung so schwierig ist
Moderne Autos, Roboter und Kartiersysteme verlassen sich zunehmend auf LiDAR, ein Verfahren, das Laserlicht auf eine Szene richtet und die Zeit misst, bis es zurückkehrt, um ein 3D‑Bild zu erstellen. Viele aktuelle Systeme richten einen schmalen Laserstrahl mit beweglichen Spiegeln, was Geschwindigkeit und Zuverlässigkeit begrenzt. Festkörperansätze ohne bewegliche Teile entstehen zwar, stoßen aber weiterhin auf Kompromisse: Elektronisch gesteuerte Strahlführung lässt sich schwer skalieren und benötigt oft lange Scanzeiten, während hochempfindliche Ein‑Photonen‑Detektoren Mühe haben, große, rauscharme Arrays mit feiner Tiefengenauigkeit zu bilden. Konventionelle Bildsensoren wie CCDs bieten bereits enorme Pixelzahlen, doch in 3D‑Systemen werden sie typischerweise mit groben Timing‑Tricks eingesetzt, die Entfernungen nur auf wenige Zentimeter genau auflösen.
Eine neue Art, Licht und Funk zu verbinden
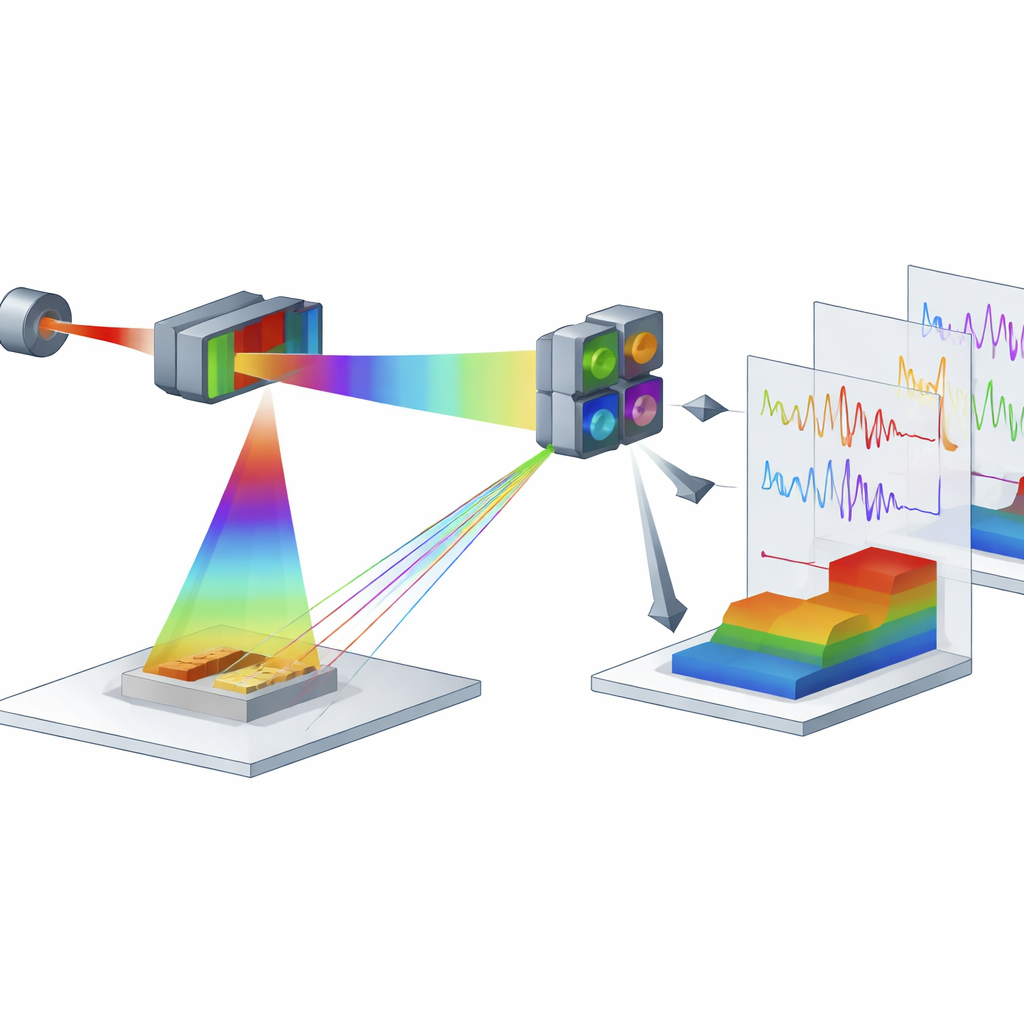
Die Autorinnen und Autoren stellen eine andere Strategie vor, die die ausgereifte CCD‑Technik mit einer als kohärente Detektion bekannten Methode verbindet, wie sie in der Hochgeschwindigkeits‑Glasfaserkommunikation verwendet wird. Statt kurze Laserpulse abzufeuern, beleuchten sie kontinuierlich mit einem Laser, dessen Helligkeit rhythmisch von einem funktechnischen Signal gesteuert wird, das über die Zeit viele dicht beieinanderliegende Frequenzen durchläuft. Ein Teil dieses modulierten Lichts flutet die Szene als „Probe“, ein anderer Teil bleibt als „lokale Referenz“ erhalten. Am Empfänger kombiniert eine optische Anordnung das schwache, von jedem Punkt der Szene zurückkehrende Licht mit dem stärkeren Referenzlicht und leitet das Ergebnis in vier synchronisierte CCD‑Kameras, die gemeinsam als ein einziger „kohärenter Bildsensor“ wirken. Innerhalb jedes Pixels kodiert die Mischung aus Probe und Referenz die Entfernung als feines Muster im aufgezeichneten Signal.
Flackern in ein 3D‑Bild verwandeln
Während eines vollständigen Frequenzdurchlaufs zeichnet jedes CCD‑Pixel eine Folge von Helligkeitswerten über tausende Frames auf. Für sich genommen zeigen diese Rohbilder fast nichts — das zurückkehrende Licht ist viel schwächer als die Referenz. Doch wendet das Team einen speziell angepassten Verarbeitungsalgorithmus an, extrahiert es eine winzige, oszillierende Komponente im Signal jedes Pixels. Die Frequenz dieser Schwingung steht in direktem Zusammenhang mit der Entfernung dieses Punktes zur Kamera. Durch eine Frequenzanalyse wandelt das System die zeitliche Spur jedes Pixels in eine genaue Distanzmessung um und stapelt diese Messwerte zu einer detaillierten 3D‑Karte. In Tests mit einem treppenförmigen Ziel in 30,5 Metern Entfernung löste die Kamera klar Stufen von nur 5 Millimetern Höhe und rekonstruierte die vollständige Oberfläche in drei Dimensionen mit allen 320 × 256 Pixeln.
Echte Szenen testen und Grenzen ausloten
Um die Praxistauglichkeit zu zeigen, bildete das Team eine Miniatur‑Verkehrsszene mit einem Auto, einer Fußgängerin und Straßenmöbeln in derselben 30,5‑Meter‑Entfernung ab. Mit nur einigen zehn Milliwatt optischer Leistung rekonstruierte die Kamera ein scharfes 3D‑Modell, in dem einzelne Objekte, ihre Schatten und Merkmale im Millimeterbereich sichtbar waren. An einer ebenen Fläche maßen sie eine Tiefengenauigkeit von nur 0,47 Millimetern — mindestens zehnmal besser als viele andere Festkörper‑LiDAR‑Konzepte. Sie untersuchten außerdem, wie sich die Leistung mit der Anzahl der verwendeten Frames ändert und fanden einen Kompromiss zwischen Geschwindigkeit und Präzision: Schnellere Aufnahmen liefern gröbere Tiefen, längere Erfassungen schärfen die Messungen. Das System blieb robust, selbst wenn Luftturbulenzen entlang des optischen Pfads eingeführt wurden, und es konnte Objekte, die seitlich mit bis zu 300 Millimetern pro Sekunde bewegten, rekonstruieren, indem die Belichtungszeit verkürzt wurde.
Von Statuen zu künftigen digitalen Welten
Über Testmuster hinaus nutzten die Forschenden ihre Kamera, um eine Büste aus acht Blickwinkeln zu scannen, jeweils in mehr als 30 Metern Entfernung. Durch das Zusammensetzen dieser Ansichten bauten sie ein lebensechtes virtuelles Modell, das aus beliebigen Richtungen gedreht und untersucht werden kann. Da die Technik prinzipiell bei sichtbaren Wellenlängen funktionieren und Hardware mit regulärer Bildgebung teilen kann, eröffnet sie die Möglichkeit für Geräte, die gleichzeitig detailreiche Farbaufnahmen und hochpräzise Tiefenkarten erfassen. Obwohl der heutige Prototyp durch die Bildrate seiner CCD‑Sensoren begrenzt ist, könnten schnellere Bildchips und intelligentere Abtastschemata die Geschwindigkeit deutlich erhöhen. Kurz gesagt zeigt diese Arbeit, dass es durch die clevere Kombination von funkähnlicher Modulation mit vertrauter Kameratechnik möglich ist, die 3D‑Welt auf lange Distanz mit submillimetergenauer Genauigkeit zu sehen — ein Fortschritt mit weitreichenden Folgen für Überwachung, Kartierung und immersive digitale Erfahrungen.
Zitation: Wang, B., Tian, J., Wang, J. et al. Large-array sub-millimeter precision coherent flash three-dimensional imaging. Nat Commun 17, 2780 (2026). https://doi.org/10.1038/s41467-026-69188-4
Schlüsselwörter: 3D‑Bildgebung, LiDAR, Tiefensensorik, kohärente Detektion, CCD‑Kameras