Clear Sky Science · it
Imaging coerente tridimensionale a flash con precisione sub-millimetrica su array di grandi dimensioni
Vedere la profondità con dettagli incredibili
Immaginate una fotocamera che non solo vede il mondo in tre dimensioni, ma misura le distanze con una precisione tale da rilevare variazioni inferiori allo spessore di una carta di credito a decine di metri di distanza. Questo è ciò che i ricercatori dietro questo lavoro hanno costruito: un nuovo tipo di camera 3D laser che combina lunga portata, precisione di profondità molto fine e la possibilità di scalare a molti più pixel. Uno strumento del genere potrebbe aiutare a monitorare piccoli spostamenti in ponti o edifici, preservare opere d’arte delicate in forma digitale e rendere le scene di realtà virtuale molto più realistiche.

Perché misurare la distanza è così difficile
Auto moderne, robot e sistemi di mappatura fanno sempre più affidamento sul LiDAR, una tecnica che illumina una scena con un laser e misura il tempo impiegato dal segnale per tornare, costruendo un’immagine 3D. Molti sistemi attuali deviano un fascio laser stretto con specchi mobili, il che limita velocità e affidabilità. Stanno emergendo soluzioni solid-state senza parti mobili, ma affrontano comunque compromessi: i progetti che deviano i fasci elettronicamente possono essere difficili da scalare e spesso impiegano molto tempo a scandire la scena, mentre rivelatori a singolo fotone molto sensibili faticano a formare grandi array a basso rumore con precisione di profondità fine. I comuni sensori d’immagine CCD offrono già un numero enorme di pixel, ma quando vengono usati nei sistemi 3D si basano tipicamente su stratagemmi di temporizzazione grezzi che risolvono le distanze solo nell’ordine di alcuni centimetri.
Un nuovo modo di usare luce e radio insieme
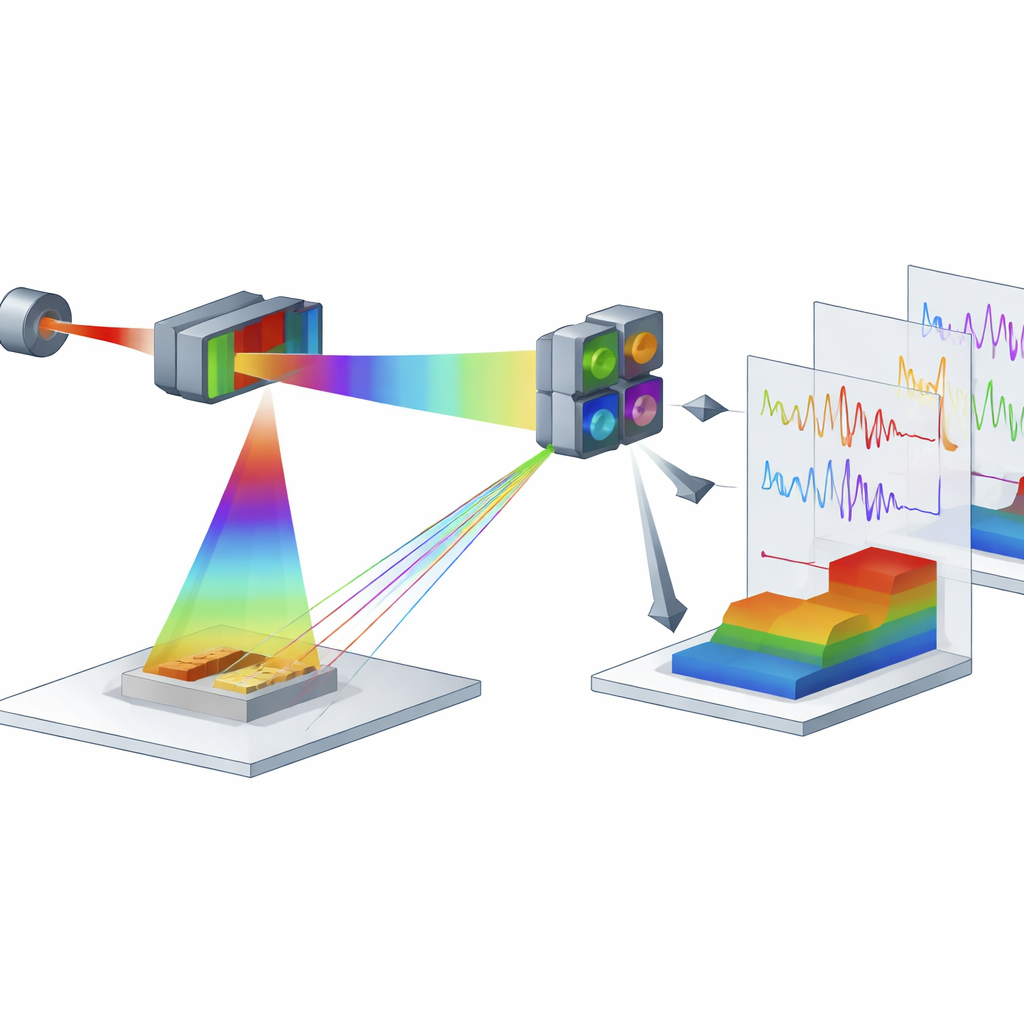
Gli autori propongono una strategia diversa che unisce la maturità della tecnologia CCD a una tecnica nota come rilevamento coerente, largamente usata nelle comunicazioni in fibra ottica ad alta velocità. Invece di sparare brevi impulsi laser, illuminano continuamente con un laser la cui intensità è modulata ritmicamente da un segnale in radiofrequenza che scansiona nel tempo molte frequenze ravvicinate. Parte di questa luce modulata irraggia la scena come “sonda”, mentre un’altra parte viene tenuta come “riferimento locale”. Al ricevitore, un sistema ottico combina la debole luce ritornata da ogni punto della scena con la luce di riferimento più intensa e alimenta il risultato in quattro fotocamere CCD sincronizzate che agiscono insieme come un unico “sensore d’immagine coerente”. In ogni pixel, la mescolanza tra sonda e riferimento codifica la distanza come un sottile motivo nel segnale registrato.
Trasformare sfarfallii in un’immagine 3D
Durante una singola scansione completa delle radiofrequenze, ogni pixel CCD registra una sequenza di valori di luminosità su migliaia di fotogrammi. Da soli, questi raw mostrano quasi nulla — la luce ritornata è molto più debole del riferimento. Ma quando i ricercatori applicano un algoritmo di elaborazione su misura, riescono a estrarre una piccola componente oscillante nel segnale di ogni pixel. La frequenza di questa oscillazione risulta direttamente legata alla distanza di quel punto dalla fotocamera. Eseguendo un’analisi in frequenza, il sistema converte la traccia temporale di ogni pixel in una misura di distanza accurata, impilando queste misure in una mappa 3D dettagliata. In test con un bersaglio a gradini posto a 30,5 metri, la camera ha distinto chiaramente gradini alti solo 5 millimetri e ha ricostruito l’intera superficie in tre dimensioni usando tutti i 320 × 256 pixel.
Testare scene reali e spingere i limiti
Per dimostrare cosa il sistema può fare in pratica, il team ha ripreso una scena stradale in miniatura contenente un’auto, un pedone e elementi d’arredo urbano alla stessa distanza di 30,5 metri. Con solo poche decine di milliwatt di potenza ottica, la camera ha ricostruito un modello 3D nitido in cui oggetti individuali, le loro ombre e caratteristiche su scala millimetrica erano visibili. Usando un bersaglio piatto, hanno misurato una precisione di profondità di appena 0,47 millimetri — almeno dieci volte migliore di molti altri progetti LiDAR solid-state. Hanno inoltre esplorato come le prestazioni cambiano con il numero di fotogrammi utilizzati, trovando un compromesso tra velocità e precisione: acquisizioni più rapide danno profonde stime più grezze, mentre acquisizioni più lunghe affinano le misure. Il sistema è rimasto robusto anche quando è stata introdotta turbolenza d’aria lungo il percorso ottico, e ha potuto ricostruire oggetti che si muovevano lateralmente fino a 300 millimetri al secondo accorciando il tempo di esposizione.
Dalle statue ai futuri mondi digitali
Oltre ai pattern di prova, i ricercatori hanno usato la loro camera per scansionare un busto scultoreo da otto angolazioni, ciascuna a oltre 30 metri di distanza. Unendo queste viste, hanno costruito un modello virtuale realistico che può essere ruotato ed esaminato da qualsiasi direzione. Poiché la tecnica può, in linea di principio, funzionare a lunghezze d’onda visibili e condividere l’hardware con l’imaging convenzionale, apre la strada a dispositivi che catturano contemporaneamente fotografie a colori dettagliate e mappe di profondità ultra-precise. Sebbene il prototipo attuale sia limitato dalla velocità di acquisizione dei sensori CCD, chip d’immagine più veloci e schemi di campionamento più intelligenti potrebbero aumentare dramaticamente la velocità. In termini semplici, questo lavoro dimostra che combinando in modo ingegnoso la modulazione in stile radio con la tecnologia delle fotocamere familiari, è possibile vedere il mondo 3D a lunga distanza con accuratezza sub-millimetrica — un progresso con implicazioni di vasta portata per monitoraggio, mappatura ed esperienze digitali immersive.
Citazione: Wang, B., Tian, J., Wang, J. et al. Large-array sub-millimeter precision coherent flash three-dimensional imaging. Nat Commun 17, 2780 (2026). https://doi.org/10.1038/s41467-026-69188-4
Parole chiave: Imaging 3D, LiDAR, rilevamento della profondità, rilevamento coerente, fotocamere CCD